




 广告
广告





















































130 km/h!ALKS最新版自动车道保持系统法规完全覆盖高速场景

每个自动驾驶行业人士都应该关注这个标准,不管是从事软件、硬件还是产品。这个ALKS标准修订后基本覆盖了高速公路点到点自动驾驶全场景,不再仅适用于高速公路低速或堵车场景。
虽然名字ALKS看着类似ADAS的LKA功能,笔者认为其实该标准已经是一个高级别自动驾驶系统标准,甚至覆盖了L4级。理由是该标准要求系统在驾驶员未及时接管时应执行MRM最低风险操作,而系统的最低风险操作应使车辆在最大风险最小化的区域停车。这实质上要求实现L4级系统的DDT Fallback功能需求。
*MRM最低风险操作相关法规内容:
5.1.5. 如果驾驶员在转换阶段未能恢复对DDT的控制,则系统应执行MRM最低风险操作。在最低风险操纵期间,系统应将车辆乘员和其他道路使用者的安全风险降至最低。5.4.4.1. 如果驾驶员未通过停用系统来响应接管需求,应在接管需求开始最短10秒后开始最低风险操作。5.4.4.1.1.在发生严重ALKS或严重车辆故障的情况下,可立即启动最低风险操纵。5.5.MRM最小风险操作/ Minimum Risk Manoeuvre5.5.1. 除非驾驶员在操纵过程中停用系统,否则最低风险操纵应使车辆变为静止状态。
根据第5.2.6的规定,这应位于被认为是在给定情况下(例如交通状况、环境条件、系统故障)可实现的最大风险最小化的目标停车区域。如果需要换道以到达目标停车区域,并且ALKS能够执行MRM换道。否则,在其当前车道内,或在车道标线不可见的情况下,在考虑周围的交通和道路基础设施条件下遵循适当的轨迹。
法规修订
UNECE于2022年6月22日已批准了有关“自动车道保持系统(ALKS)”的联合国第157号法规修正案。将特定交通环境中的自动驾驶系统 (ADS)车速上限从当前的60公里/小时限制扩展到130公里/小时,并允许自动变道等处理。

该修正案草案由自动驾驶和联网汽车工作组制定提出,基于各国在世界车辆法规协调论坛2020年6月通过全球范围内首个对 SAE L3级自动驾驶车辆具有约束力的国际法规《联合国自动车道保持系统条例》(ALKS)实施后的实践经验。该法规标志着自动驾驶技术发展的重要一步,于2021年1月22日生效,日本本田限量版Legend是首个适用L3级自动驾驶车型,奔驰则成为欧洲首个真正被允许量产上市L3级自动驾驶新车的车企。
本次的修正案将从2023年1月在决定适用它的缔约方中生效。
本法规旨在制定关于自动车道保持系统(ALKS)车辆认证的统一规定。ALKS控制车辆长时间的横向和纵向移动,无需驾驶员进一步命令。当激活系统时ALKS负责车辆主要控制(ALKS is a system whereby the activated system is in primary control of the vehicle.)。
本法规包括关于系统安全和故障保护响应的一般要求。激活ALKS时,其应代替驾驶员执行驾驶任务,即管理包括故障在内的所有情况,并且不得危及车辆乘员或任何其他道路使用者的安全。然而,驾驶员随时都有可能超控(override)系统。
该法规还规定了如何将驾驶任务从ALK安全移交给驾驶员的要求,包括在驾驶员没有适当回答时系统进行停车的能力。
ALKS法规是交通中自动驾驶系统(定义见ECE/TRANS/WP.29/1140)的首个监管步骤,提供了旨在解决与系统安全性评估相关的复杂性的创新规定,该法规规定了明确的基于性能的要求,汽车制造商必须遵守这些要求,才能在实施该法规的国家内销售配备的车辆。它包括关于型式认证、技术要求、审计和报告的规定,以及在测试场和真实条件下的测试。包含适用于型式认证的管理规定、技术要求、审计和报告规定以及测试规定。
部分关键修订内容对比
进行了全面修订,主要内容包括最高车速提升至130km/h、适用车型扩大至M类及N类全范围、功能定义、探测距离、测试方法等,卡车技术前线整理了部分修订事项,详见标准原文。
0、范围和目的
旧版1、范围和目的1.1. 本法规适用于M1类车辆自动车道保持系统的型式认证。
新版1、范围和目的1.1. 本法规适用于与自动车道保持系统有关的M和 N类车辆的型式认证。
1、UN-R157法规中ALKS定义
旧版定义:ALKS自动车道保持系统(Automated Lane Keeping System)是在不需要驾驶员控制的情况下,系统可以长时间自动控制车辆的横向和纵向移动,可以在某些条件下在禁止行人和骑自行车的道路上激活,并有双向通行的物理(隔离墩)分隔,同时第一阶段限制在运行速度为60公里/小时和乘用车(M1车辆)。作为第一步,本法规的原文将最大运行速度限制为60 km/h且对象为乘用车(M1类车辆)。
新版定义:2.1. “自动车道保持系统(ALKS)”是一种由驾驶员激活的系统,通过长时间控制车辆的横向和纵向运动,使车辆保持在其车道内,行驶速度为130 km/h或以下,无需驾驶员进一步输入。
2、最高车速
旧版5.2.3.1. The maximum speed up to which the system is permitted to operate is 60 km/h.5.2.3.1. 系统允许运行的最大速度为60公里/小时。
新版5.2.3.1. 速度制造商应根据第7.1.1段中所述系统的正向检测范围宣布规定的最大速度。系统允许运行的最大速度为130公里/小时。仅当ALKS能够根据第5.2.6段进行MRM换道时,才允许规定的最大速度超过60 km/h。
3、前向探测距离
旧版
7.1.1. 正向探测范围制造商应声明从车辆最前端点测量的前向检测范围。该声明值应至少为46米。技术服务机构应验证车辆传感系统在附件5中的相关试验期间检测到道路使用者的距离等于或大于声明值。
新版
7.1.1. Forward detection range制造商应声明从车辆最前端点测量的前向检测范围。当规定的最大速度为60 km/h时,该声明值应至少为46米。
制造商只有在声明的正向检测范围满足下表中基于5m/s²减速度的相应最小值的条件下,才能声明高于60 km/h的规定最大速度。
最小前向检测距离和5m/s²车辆减速度并不能在所有条件下(例如在湿滑的道路上)均实现。系统应实施控制策略以调节实际检测范围和实际减速能力下的最大速度,符合第5.2.4段的要求。
•车速0…60km/h,最小前方探测距离46m;•车速70km/h,最小前方探测距离50m;•车速80km/h,最小前方探测距离60m;•车速90km/h,最小前方探测距离75m;•车速100km/h,最小前方探测距离90m;•车速110km/h,最小前方探测距离110m;•车速120km/h,最小前方探测距离130m;•车速130km/h,最小前方探测距离150m。

4、最小跟车距离要求
旧版
新版
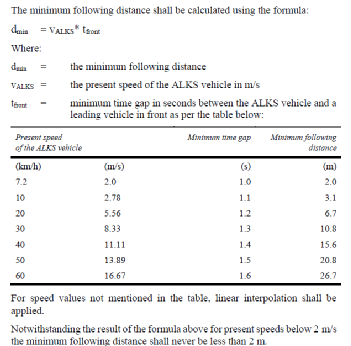
激活系统应检测到与第7.1.1段中定义的前方下一辆车的距离。并应调整车速以调整安全跟车距离,以避免碰撞。
当ALKS车辆不处于静止状态且在高达60 km/h的速度范围内运行时,系统应根据下表调整速度,将与同一车道前方车辆的距离调整为等于或大于最小跟车距离。
对于高达60 km/h的速度,应使用公式计算最小距离。
对于表中未提及的最高60 km/h的速度值,应采用线性插值。
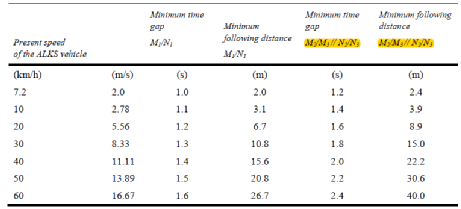
尽管上述公式得出了当前速度低于2 m/s的结果,但M1、N1的最小跟车距离不得小于2 m,M2、M3、N2、N3的最小跟车距离不得小于2.4 m。
对于60 km/h以上的速度,激活系统应符合第5.1.2段中定义的车辆运行国家的最小跟车距离。(5.1.2. 激活的系统应符合车辆运营国与DDT有关的交通规则,包括应对紧急/执法车辆。)
5、场景难度分类示例
Cut-in场景难度分类

Cut-out

观点总结
•可以说这部法规给自动驾驶打开了绿灯。•今后也不能再用“法规跟不上”做理由了。•国内众多新势力可以考虑为自己的L3正名了。•驾驶员没接管时系统应实现MRM,岂不是说系统承担所有责任?这与这两天炒的沸沸扬扬的深圳条例有着实质性的冲突。
以下为标准目录,供参考。




编辑推荐




最新资讯
-
漫说信息智能 · 电动车防晕车大作战
2025-04-27 16:28
-
R171.01对DCAS的要求⑨
2025-04-27 15:29
-
智驾标准法规体系大全
2025-04-27 15:28
-
国内最大汽车创作者大会开幕,懂车帝投入5
2025-04-27 13:18
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
