




 广告
广告





















































智能网联汽车毫米波雷达在环测试研究

摘要
智能网联汽车测试及验证技术一直是汽车产业发展的热点,其中毫米波雷达已在 ADAS 系统中获得广泛应用,然而毫米波雷达虚拟测试在环模型仍存在精确度不高,与实车测试结果有较大差异等局限,基于此本文搭建结合目标物反射特性的毫米波雷达在环虚拟测试平台。首先利用真实雷达测试数据构建不同角度下目标物 RCS 包络图,再联合 CarMaker 与 dSPACE 搭建出虚拟测试平台,最后与实车试验数据进行对比分析,验证虚拟测试平台的可行性。试验结果表明该平台可很好地反映实车测试结果,确保 ADAS 系统高效测试。
近年来,智能网联技术已成为汽车行业研究重点和热点,同时互联网企业等竞相加入,成为高新技术领域关注的焦点。为推动智能网联汽车发展进程,研究相应测试技术、评价体系的工作势在必行。智能网联汽车集“感知、决策、控制、执行”功能于一体,其中,感知系统使车辆获取外界环境交通信息,而毫米波雷达又作为该系统的重要传感器,因此研究测试毫米波雷达的真实性、准确性等变得尤为重要。
基于毫米波雷达的智能驾驶系统已得到各车企广泛应用,如自动紧急制动AEB、自适应巡航控制ACC,为车辆行驶提供安全保障。硬件在环测试凭借成本低廉、操作灵活等特点成为前期开发的重要一环,其通过I/O口、CAN线等实现与摄像头、毫米波雷达、控制器等相连完成虚拟测试系统搭建,可以在预先设定的场景中对智能网联汽车控制算法进行测试。目前有National Instruments(NI)、DENSO、dSPACE等建立起了毫米波雷达在环仿真模拟器,提供了很好的试验工具手段与经验借鉴。然而当前研究更加关注于模拟目标数量、距离方面,针对目标物反射特性投入较少,存在目标物RCS(RadarCrossSection雷达反射截面)常量化,仿真结果与实际道路测试结果存在较大差异等局限。因此毫米波雷达在环测试平台需要进一步优化才能满足未来智能网联汽车测试要求。
基于此,本文结合目标物反射特性搭建出毫米波雷达在环测试系统,使用CarMaker软件与dSPACE雷达目标模拟器等对车辆控制器性能进行测试,并结合实车测试对本文建立的毫米波雷达虚拟在环测试平台进行验证。
1 目标物反射特性分析
1.1 雷达反射截面分析
RCS是度量目标在雷达波照射下所产生回波强度的一种物理量,可以定量地表征目标对电磁波反射能力。关于雷达接受天线方面,通常假设存在一个等效的接受面积,该等效的接受面积乘以入射波功率密度便等于雷达接受功率。因此,RCS是目标物针对接受天线“等效接受面积”的扩展,是雷达针对目标物一种假想等效面积。
雷达反射截面积可以用平方米来表示,也可以用分贝平方米表示(dBsm),两者之间的数学关系为:

考虑到目标物尺寸远大于雷达波长,目标物总的反射场可以由多个分散的强反射源叠加计算。由于目标物表面反射的相位存在随机变化的情况,式(1)中的RCS值也将随着入射角改变而动态变化,甚至可能出现较小的入射角变化,目标物的RCS值出现数量级的改变。因此亟需建立起不同角度的目标物RCS,尽量真实还原实车测试场景。
1.2 目标物RCS包络图
目标物RCS的动态变化、外部空间环境等因素可引起雷达接受功率改变,基于雷达接受功率与目标物RCS之间的数学关系,建立起雷达接受功率变化模型,其中雷达接受功率可表示为:

式中:Pt—传播功率;R—目标物与雷达之间的相对距离;G—天线增益;λ—毫米波波长;σ—目标物的RCS。
当目标物对雷达发射的电磁波反射后,该电磁波便携带了目标物的反射特性信息。
根据公式(2),σ与接受功率Pr,同雷达相对纵向距离R存在等式关系,因此在实际的毫米波雷达目标模拟器仿真中,是通过控制毫米波雷达目标模拟器的发射天线的功率来模拟目标物反射情况,使得被测毫米波雷达传感器探测到的接受功率与目标物的实际RCS值相符,配合毫米波雷达目标模拟器的天线转动进而实现在不同角度下RCS的实时动态更新。
为获取目标物不同角度的RCS值,本文选取76GHz真实雷达采集数据信息,为硬件在环仿真测试提供支撑。目标物静止放置于测试场地,测试车辆以10km/h速度从远处逐渐靠近目标物,定义测试车辆与目标物“头对头”时的角度为0°,每30°顺时针方向旋转目标物的朝向,测试方法如图1所示。

图1 目标物RCS测试方法
依据上述测试方法便可得到关于目标物不同角度的RCS数据断点,编辑设置虚拟目标物信息导入到CarMaker软件,便可构建出如图2所示的行人、车辆、踏板式二轮车的RCS包络图。
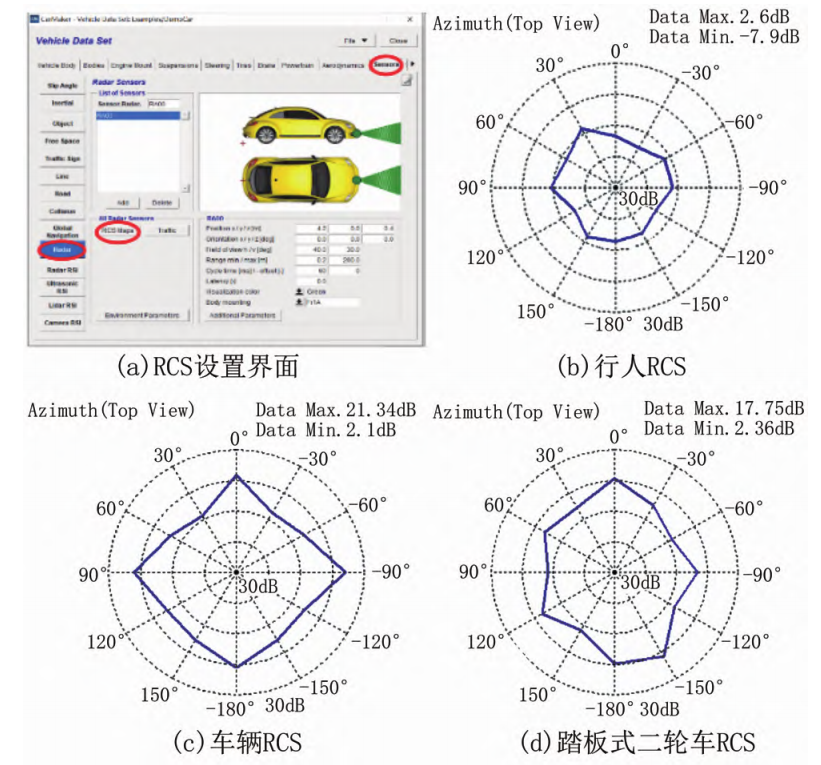
图2 RCS设置界面及不同目标物RCS包络图
2 毫米波雷达在环测试系统
2.1 毫米波雷达在环虚拟测试系统
相比于软件仿真,该测试平台基于Carmaker场景信息通过驱动天线电机改变发射角度,利用雷达回波发生器(ARSG)产生电磁波信号传送给真实的雷达。同时将控制器通过I/O口与dSPACE机柜相连,编辑不同的测试用例,进而实现被测对象系统的、全面的硬件在环仿真测试,其测试原理如图3所示。

图3 毫米波雷达在环虚拟测试平台
首先,毫米波雷达安装在暗室台架上发射电磁波信号,部分信号被收发天线接收,其余信号被暗室内的吸波材料吸收。接收的信号降频后被数据处理器分析,通过对信号延时和多普勒频移等,生成包含目标物距离、速度、角度以及反映目标物特性RCS的信号,同时驱动转盘等执行机构,来模拟发射真实的电磁波信号。雷达接收到虚拟目标信息后,通过CAN通信的方式传递给控制器,控制器经过算法计算得出控制指令,再通过CAN总线发回dSPACE实时机柜,驱动虚拟车辆模型,进而搭建出闭环的毫米波雷达在环测试系统。
2.2 毫米波雷达在环实车测试系统
实车测试系统由载有毫米波雷达的测试车辆、陀螺仪RT3000及机器人控制器组成,RT3000可以获得试验车辆的位置、速度、偏航角等信息,同时可以利用控制器计算出试验车与目标物的相对距离、速度等。这套设备具有高精度、低时延的特点,经常用来验证摄像、雷达等传感器和ACC、AEB等控制器。
该实车测试系统原理为:载有毫米波雷达的测试车辆按设定的测试用例行驶,利用陀螺仪和控制器获取本车与目标车辆的相对距离、速度等数据信息,并记录AEB、ACC等功能触发前后本车的速度、减速度变化曲线等。测试原理如图4所示。
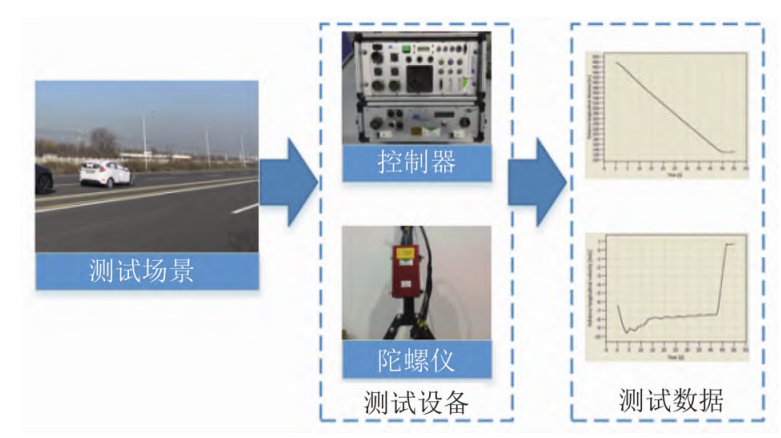
图4 毫米波雷达在环实车测试原理
3 仿真与实车对比测试验证
为验证毫米波雷达虚拟在环测试平台的可行性,本文利用德国IPG公司开发的CarMaker软件搭建仿真测试场景,利用dSPACE毫米波雷达目标模拟器来仿真目标物动态信息。同时为了更好地对比验证效果,结合实车在相同的测试环境下进行比较,来验证虚拟测试平台的可信性。
3.1 行人横穿测试验证
本文结合ADAS控制器的AEB、ACC等功能展开测试,控制器和传感器硬件均由国内某主机厂提供。测试用例选择CCRT(中国汽车消费者研究与评价规程)中行人横穿的场景,如图5所示。试验车辆设置车速为40km/h,当试验车辆与行人轨迹TTC为3.6s时,行人以5km/h速度出发,来验证车辆的识别与响应能力。记录试验车辆相对纵向距离、本车车速、本车与行人相对速度变化情况,并与实车测试结果进行对比验证,试验验证结果如图6~图8所示。
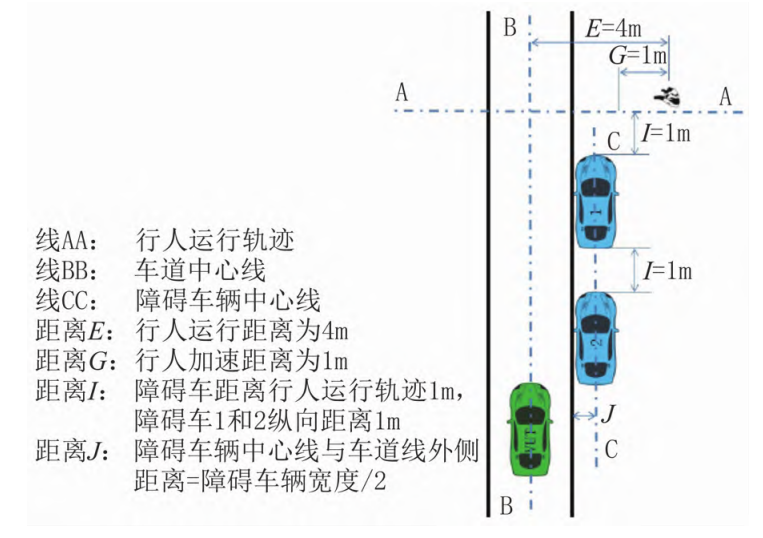
图5 行人横穿测试场景示意图
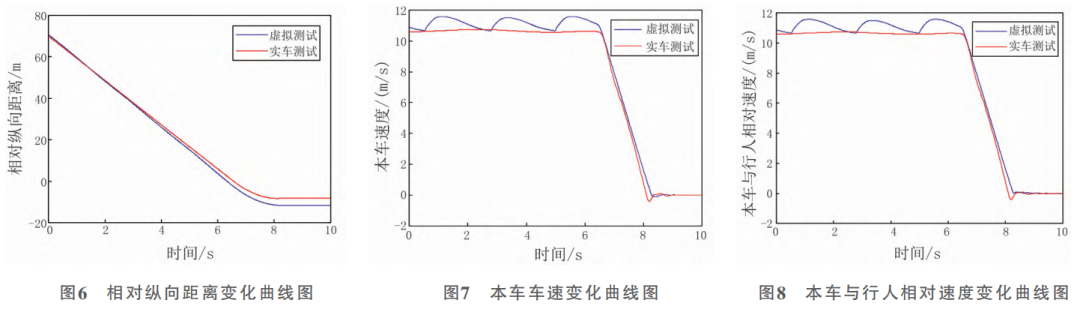
根据测试结果,在行人横穿的场景下,车辆AEB功能可正常作用,表明车辆可识别目标物并减速制动,虚拟测试可较好地反映实车测试结果,但由于行人横穿的突发性导致车辆未能提早制动。根据相对纵向距离变化图可知,车辆与行人发生了碰撞,发生碰撞时虚拟测试的相对碰撞速度为10.4m/s,发生碰撞时实车测试的相对碰撞速度为10.2m/s。其中,本车车速、前车与行人的相对车速变化曲线在虚拟与实车测试中表现相对一致。
3.2 前方车辆慢行测试验证
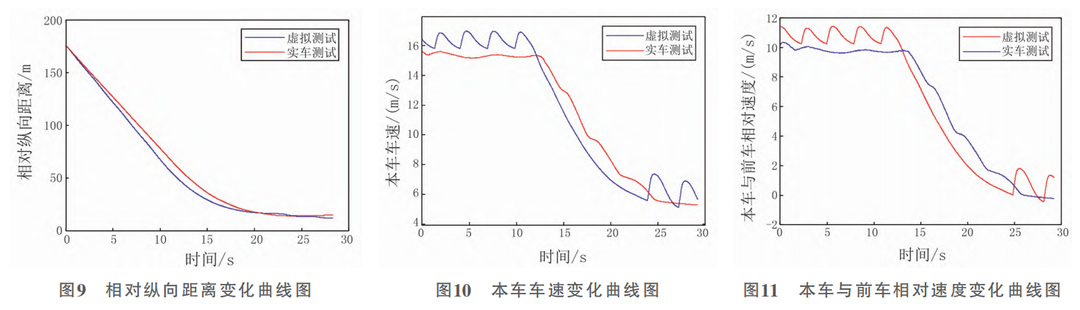
为验证前方目标物为车辆时的测试效果,试验车辆以60km/h速度驶向20km/h慢行的目标车辆,分别记录试验车辆相对纵向距离、本车车速、本车与前车相对速度变化情况,并与实车测试结果进行对比验证,试验验证结果如图9~图11所示。
根据测试结果,在前车20km/h慢行后车60km/h跟随情况下,车辆ACC功能可正常开启并作用,虚拟测试可较好地反映实车测试结果。其中,达到稳定跟车时虚拟测试的相对纵向距离为12m,实车测试为14m;并且本车车速、前车与本车的相对车速变化曲线在虚拟与实车测试中比较吻合。
3.3 前方二轮车慢行测试验证
为验证前方目标物为二轮车时的测试效果,试验车辆以80km/h速度驶向30km/h慢行的二轮车,分别记录试验车辆相对纵向距离、本车车速、本车与目标二轮车相对速度变化情况,并与实车测试结果进行对比验证,试验验证结果如图12~图14所示。
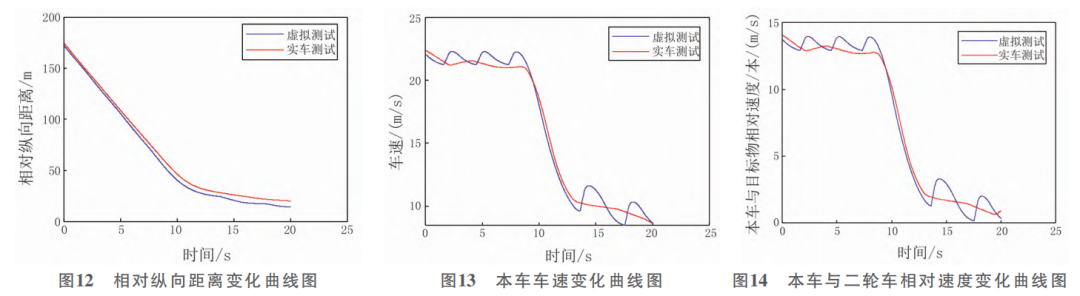
根据测试结果,在二轮车30km/h慢行后车60km/h跟随情况下,车辆ACC功能可正常作用,表明车辆可识别目标物并减速跟车,虚拟测试可较好地反映实车测试结果。其中,达到稳定跟车时虚拟测试的相对纵向距离为16m,实车测试为18.9m;并且本车车速、前车与目标物的相对车速变化曲线在虚拟与实车测试中相对吻合,验证了该虚拟测试平台具有可行性。
4 结论
本文首先分析毫米波雷达目标反射特性,绘制出了不同类型目标物不同角度下的RCS包络图。同时联合CarMaker、dSPACE搭建了毫米波雷达在环测试平台,联合陀螺仪、控制器等搭建了实车测试平台,并结合CCRT评价规程中的测试用例针对ADAS控制器进行对比测试。试验结果表明,虚拟测试平台的车辆动态响应(与目标物的相对纵向距离、本车车速、相对速度变化等)可很好地反映实车测试结果,验证了该虚拟测试平台具有可行性。



编辑推荐




最新资讯
-
FLIR E8 Pro热像仪:汽车漏水检测的“火眼
2025-04-08 10:34
-
德法英日韩之后,瑞士也允许L3上路了
2025-04-08 07:56
-
泽尔测试战略入股赛孚汽车科技,布局汽车安
2025-04-07 17:33
-
每秒采集100万个数据 | 下一代USB DAQ产品-
2025-04-07 14:12
-
重型商用车辆和客车的动力学——振动环境
2025-04-07 14:11
