




 广告
广告





















































会议通知丨智能网联整车在环(VIL)仿真技术研讨会将于7月28日召开

2022年7月28日,C-ASAM将组织召开“智能网联整车在环(VIL)仿真技术研讨会”,针对行业高度关注的智能网联整车在环测试相关技术与应用进展进行汇报、分享与讨论,欢迎大家积极参与。
1.为什么要进行整车在环测试(VIL)?
试验及仿真测试是从功能、性能、安全、稳定及鲁棒性等方面推动自动驾驶技术研究、保证自动驾驶安全可靠、促进自动驾驶产品不断迭代的有效技术手段。
为了推动智能网联汽车技术的发展,我国及美、欧、日等发达国家或地区通过建设封闭或开放式自动驾驶测试示范区、依托社会公共道路有序开放自动驾驶测试道路等方式大力推进自动驾驶实车道路试验环境的构建。
然而,当前阶段的实车道路试验存在诸多负面因素:
★符合预期条件的试验场景构建难度高;
★人机混驾试验存在安全风险;
★试验及人力成本居高不下;
★试验数据收集难度高,精度及准确度难以区分;
★可重复性较差,尤其是对于边角及危险场景。
除实车道路测试外,软件在环仿真(SIL)也是开展自动驾驶技术研究的重要技术手段,具有风险低、周期短、成本低的优势,因此受到了众多企业与研究机构的青睐。但是软件在环仿真同样有其不足之处:
★道路及传感器仿真保真度差;
★车辆动力学模型建模难度大;
★仿真结果高度依赖所建模型的完备程度;
★仅适用于功能测试阶段,如验证自动驾驶决策与控制算法等。
因此,基于整车在环(Vehicle-In-the-Loop,VIL)的虚拟仿真测试成为充分利用实车道路测试与软件仿真优势,并弥补其不足的重要技术手段。

整车在环仿真测试是指将自动驾驶汽车整车置于模拟仿真环路中进行测试,即车辆控制采用真实的规划决策系统和控制执行系统,道路路面通过多自由度转鼓平台等模拟,交通场景等则通过仿真软件建模、数据回放输入等方式仿真。
整车在环仿真测试既可以保证测试对象的真实度,又可以充分利用软件仿真中交通场景柔性多样化的优势,从而在保证测试结果符合车辆实际工况的同时加速测试进程、降低成本、提高效率。
随着智能网联功能的深入落地,整车在环测试将成为走向大规模量产的关键一环。本次研讨会邀请了国内外知名专家,为您带来精彩的解读与分享,敬请关注!
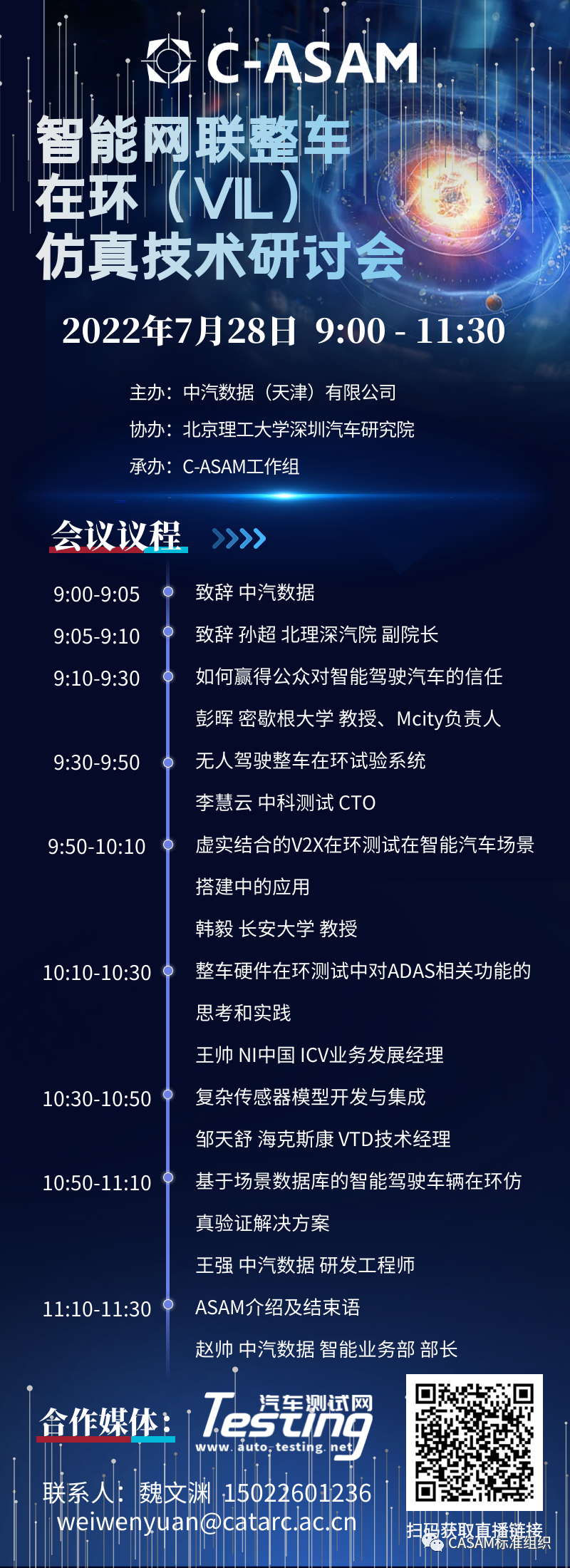
2.智能网联整车在环(VIL)仿真技术研讨会议程及参与方式
本次研讨会的具体议程请见下图,扫码注册即可获得参与观看直播的资格。
如需获取本次研讨会的具体日程,敬请关注 “CASAM标准组织” 公众号,输入“VIL研讨会”关键字获取下载链接。后续将为大家带来本次研讨会最新的议题与嘉宾介绍,敬请大家关注!
此外,C-ASAM工作组将针对行业关注热点、共性难题等持续开展研究与跟进,欢迎广大ASAM会员及非会员单位积极参与,从技术进展、活动形式、会议主题、议题内容等方面共同思考,为中国智能网联汽车产业发展贡献力量!



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
