




 广告
广告





















































博世高性能惯性测量单元SMI240

高精定位是实现高级辅助驾驶和自动驾驶应用的必要条件之一。车辆要实现L2+ 的自动驾驶体验,就需要根据不同的应用场景、不同的精度要求和不同的功能安全等级,来选择系统所搭载的硬件类型。
在高精定位的应用中,有两种关键的定位方案相辅相成:
一是通过环境感知传感器,如激光雷达和摄像头采集环境信息,结合高精特征地图来实现定位功能。这使得车辆在城市道路中能规划最合适的路径,精准避障。
二是通过GNSS(全球导航卫星系统)实时获取卫星信号,再结合RTK(实时差分定位)服务进行误差补偿校准来进行空旷路段高速行驶的导航。
但这两种实现方式都有其不足之处:激光雷达和摄像头采集的环境信息会受天气和遮挡物的影响;GNSS系统在隧道、高层密集楼宇这些卫星信号不能覆盖的地方就不能获得精确的车辆定位信息。
但惯性测量单元IMU(inertial measurement unit)技术的发展逐渐弥补了激光雷达、摄像头、GNSS系统的不足。
IMU 的核心零部件为陀螺仪和加速度计。陀螺仪用以获取运动体的角速度并测量其角度变化,加速度计用以获取运动体的线性加速度并测量其速度变化。惯性导航解算软件通过积分运算、姿态矩阵计算等方法,计算出地理坐标系下运载体的速度、位置和姿态。
作为惯性导航系统INS(inertial navigation system)中的核心器件,IMU不受外界环境的影响,根据惯性数据为现有技术提供关键的数据补充,使得系统高精组合导航得以实现。
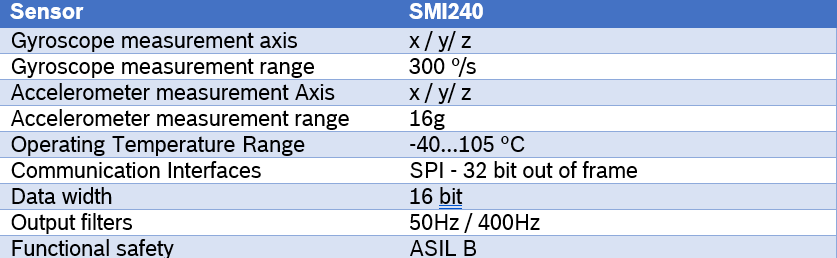
博世全新高精度惯性测量单元SMI240使用小型LGA封装 3.3 x 3.3 x 1.1 mm,内部集成三轴陀螺仪和三轴加速度计,符合车规级AEC-Q100 Grade2,为系统提供高精度和高可靠性的惯性测量数据。
SMI240 主要参数
博世SMI240完全按照ISO26262:2018 标准开发,内部集成功能安全控制器(SCON),可对芯片近100个内部信号进行实时监控并提供16位数据长度的加速度和角速度信号,适用于系统满足ASIL-B等级功能安全要求的L2+的自动驾驶等应用。

功能安全数据
SMI240集高性能和高集成度于一体,不仅能实现6轴惯性测量,还完美实现了低噪声和高稳定性的统一:陀螺仪噪声控制在± 0.1 °/s、加速度计噪声低至± 4mg的同时,Allan 方差指标陀螺仪 < 5 °/h、加速度计 50 ug,再车辆运行中始终能保持精确稳定的数据输出。
博世一直以来都是MEMS传感器技术的引领者,在MEMS领域拥有突破性的“博世工艺”和1000多项专利及专利申请。凭借领先的MEMS技术和深厚的整车系统经验,博世致力于为客户提供高性能、高质量的产品和专业的服务支持。



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
