




 广告
广告





















































提高自驱动电动汽车下压力的气动方法

摘要
本研究提出了电动汽车的自驱动和空气动力学稳健设计。根据交通工具设计的标准程序,使用仿生原理进行了车辆设计。Speedform(车辆设计的一种原始形式,通常被认为是交通设计的视觉词汇)是使用AutoCAD进行计算开发的。为了提高车辆的空气动力学稳健性,提出了独特的空气动力学扰流板。VAWT(垂直轴风力涡轮机)与空气动力学扰流板相结合,有助于产生车辆所需的动力。车辆的最终外部设计在AutoDesk MAYA上建模,使用计算流体动力学(CFD)分析了增加的下压力和减少的空气阻力。采用Realizable k-e湍流模型用于ANSYS Fluent上的CFD分析。考虑了阻力系数、升力系数和速度等值线,用于优化和验证几何形状。
引言
随着对气候变化的日益关注和 AQI(空气质量指数)的下降,可以看到全球朝着可持续能源生产的转变。因此,电动汽车(EV)的重要性获得了巨大的发展势头。然而,电动汽车有时候又不令人兴奋,并且很难将其设想为高性能汽车。保持可持续性的观点和令人兴奋的高性能汽车一起向前发展一直是这项研究的主要目标。本文涉及研究的第一阶段,其中仅考虑车辆外型设计、空气动力学稳健性和提出车辆自驱动的概念。
研究动机
全球汽车行业预计到 2035 年将完全禁止使用汽油和柴油等传统能源驱动的汽车。考虑到2035年的情景,届时几乎全部人类将大体转向使用电动汽车,因此需要有效的充电基础设施。随着时代的发展,印度仍有许多村庄没有通电,能否在15年的时间内建成能够取代所有汽油和柴油加油站的基础设施?如果建成,将如何为所有这些充电站供电?建设能提供清洁能源和可持续电力的发电站将是下一个挑战。如果不是这样,并且如果电力是通过传统方式生产的,那么使用汽油和柴油的车辆与电动车辆几乎没有任何区别。因此,对于电动汽车来说,一个主要的挑战是基础设施。与此同时,区分不同车辆性能的参数也会出现偏差。续航里程、完全充满电所需时间都值得提出来。如果行驶里程大于汽车的续航里程,人们就必须在中途重新充电,或者携带装满充电电池的背包,这肯定会让汽车变得更笨重。车辆在充电的时候会变得多余,如果充满电的时间是几个小时,在紧急情况下它们几乎没有任何用处。因此,人们一直在寻求更好的电力驱动方式。世界各地的研究人员都在研究如何制造一种自驱动的汽车。
文献综述研究的主要目标是开发一种空气动力学稳健的设计,不仅在美学上独特,而且支持车辆的自动力事业。在研究院的一个项目中,Rohini进行了一项关于S级运动轿跑草图和外部轮廓设计的计算生成研究,该研究的灵感来自于西塔拉姆·索尼博士为工业设计开发的类似模型。在Sitaram Soni博士的工作中发现的研究不足是,为单一设计生成的所有变体都只是2维图纸,Rohini的模型中只包含了交通设计。然而,获得的草图和车辆轮廓非常原始,有许多粗糙的表面,并且没有很好地构建和彻底开发。最终结果更像是一个纸上的概念,需要开发成一个机械合理且空气动力学稳健的正式模型。然而,也没有提出使车辆自我驱动的概念或构想。本研究填补了以往工作的所有这些研究空白。
在过去进行的许多研究工作中,风力发电在高速公路附近,VAWT安装在两条车道、铁轨(隧道、大田野等)之间的分割线上,在火车头上使用威尔斯涡轮机。受机车发电的概念启发,作为列车本身的一部分,本研究提出了一个类似于拟议车辆设计的概念。
研究方法
考虑到本文中涉及的交通设计和空气动力学为不同领域,所以研究方法分为两个部分:车辆设计和CFD(计算流体动力学)。车辆设计部分广泛地讨论了过程的不同阶段。它展示了车辆从草图到最终形状的开发过程,它的两个主要部件用于自供电,即管道和涡轮机,以及最后的封装。CFD部分讨论了验证设计和获得最佳车身周围气流的分析,以及阻力、升力和它们的系数的计算。
车辆设计
在外形模型的开发中,我们借鉴了蝠鲼的身体形态、泪滴的流线形态以及Rohini Moon研究中为获得草图而开发的原始结构的纸面概念,并对其进行了深入的研究,从而启动了外形提取和迭代的过程。在成功地进行了7个阶段的表面提取和迭代过程后,得到了最终的表面。随后得到车辆设计的原始形式,即草图,并建模如图1所示。
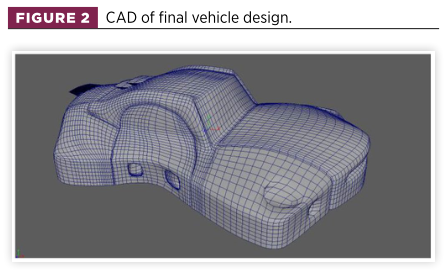
该草图进一步用于模型的形状进化过程。整车轴距为6个轮长,前后宽分别为4.5个轮长和4个轮长,高为1.75个轮长。然后,车辆的驾驶舱与前轮保持2.5个轮子的距离,与后轮保持1.5个轮子的距离,保持0.25个轮长的离地间隙。前后悬分别为1个轮长和0.5个轮长。该模型的车轮直径为691mm。考虑到所有这些尺寸,采用工程图技术绘制了完整设计的手绘草图。使用这个草图,整车在AutoDesk MAYA和SolidWorks上建模。该模型随后在ANSYS spacecclaim中使用修复函数进行修复。对分裂的边缘、未缝合的表面、不精确的边缘和样条面进行修复,然后对模型进行CFD分析。最终的车辆设计如图2所示。
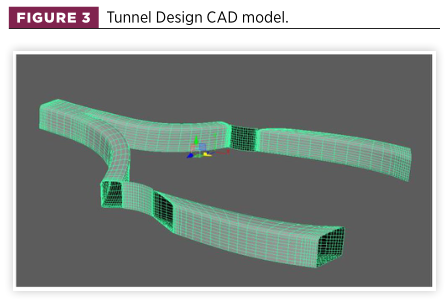
管道的设计灵感来自于泪滴的类比。管道设计的俯视图或水平视图是利用泪滴的水平视图得到的,为后续的车辆包装留下空间,并避免车轮与管道之间的摩擦。侧视图或垂直视图的设计是向上倾斜,以保持车身外部设计的约束和无涡流线流向后方。图3显示了在AutoDesk MAYA上建立的相同模型。
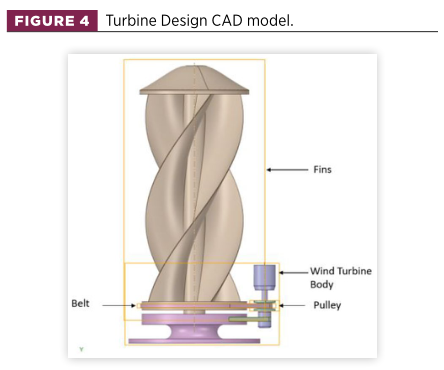
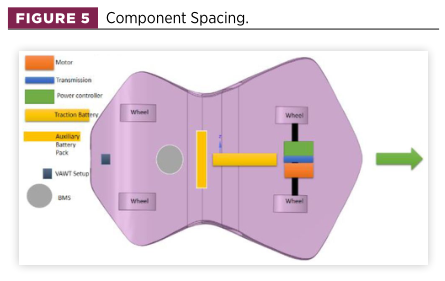
为了实现车辆自我驱动的目的,VAWT(垂直轴风力涡轮机)被放置在管道的后端。离开管道后端的空气有助于涡轮叶片的旋转,最终使用装置中的其他元件产生电力。该电力存储在辅助电池中,从而在车辆运行期间促进车辆充电,消除与充电基础设施相关的所有问题。图4表示在SolidWorks上建模的涡轮机设计。车辆包装的确定分为两个步骤:a.部件间距 b.电路图
考虑到前轮驱动车辆如果采用后轮驱动,由于在轮高上方的后中部存在隧道,会造成车辆间距的问题,所以进行了组件间距的计算。为了避免涡轮和传输回路之间不必要的压实,并便于质量的均匀分布,元件间距如图5所示。
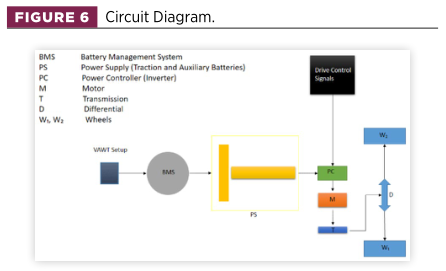
确定了用涡轮装置和电池管理系统代替充电口的电路,以利用产生的动力、辅助动力或牵引力控制哪个电池充电。直流电源由逆变器从电池中取出,转换成交流电源,并按照潜水员控制形式的给定输入控制其振幅。然后,交流电流被转移到感应电机的定子,定子反过来在转子棒中感应电流,并开始旋转。由于感应电机产生的可用扭矩之间的0至18000 RPM,只有一个单一的速度传输系统是使用的。图6以简化方框图的形式展示了整车电路。
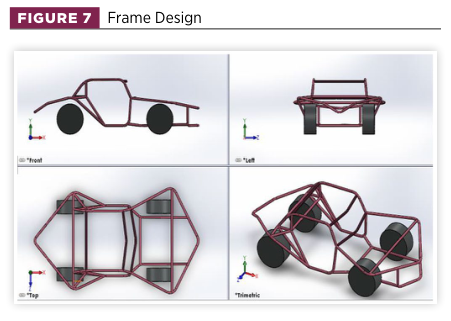
考虑到结构稳健性的概念,框架也被视为设计的一个重要元素。框架的刚度取决于其形状和制造工艺。为了提高车辆的可控性,我们需要最佳的抗扭刚度、重量轻且所有部件的重量分布均匀。为方便起见,我们选择了管状空间框架。鉴于它们具有更好的抗扭刚度,它们比任何其他类型的框架具有更多的优势。我们选择了 AISI 4130 材料,因为该材料具有更好的刚度、强度和更好的强度质量比。框架在SolidWorks 上建模,如图 7 所示。
CFD
计算流体力学可以广泛地用于物体周围气流的分析。本文采用的方法是基于阻力、升力及其系数的计算。本文采用的方法与大多数CFD分析中使用的典型方法相似,首先,将连续域转化为离散域,将物理问题转化为数学模型。然后利用边界条件和各种模型,利用相应的求解器对数学模型进行求解,得到数值解(所选点所需变量)。利用后处理软件将数值解可视化。因此,可以根据需要利用物理流进行研究。该分析的主要目的是验证设计,并获得最佳的汽车周围气流。空气动力学在许多方面发挥着重要的作用,比如燃油经济性、加速,在这种情况下,通过固定在汽车后部管道末端的涡轮机,使管道内的空气流量最大化,从而促进发电。从第一次迭代获得的矢量和流线形式的速度等值线表明,流动具有不连续性。车身周围产生了许多不必要的涡流,阻碍了下游的分流。对车辆的设计进行了优化,以获得最小的涡流产生和最佳的阻力。类似地,对管道几何形状进行了某些更改,以便在其中获得最大的气流,从而产生更高的下压力。重复此过程,直到获得最佳结果。在此过程中,主要空气动力学部件(如挡风玻璃、车顶和管道)发生了重大变化。
网格 在几何建模之后,通过构造一个包含车辆的外壳来定义一个有限体积域。在有限体积域内进行了模拟。利用ANSYS Workbench啮合工具进行离散化。CFD研究一般倾向于大的流场,但考虑到计算成本和流动问题的性质,限制在以下几个维度:长L+2m,宽B+2m,高H+1.5m;L、B、H分别表示车辆的长、宽、高。计算域边界与前、后、两侧车辆的间距保持1m,顶部距车辆顶部1.5m,地面距车辆底部0m。
表1描述了使用的网格设置。
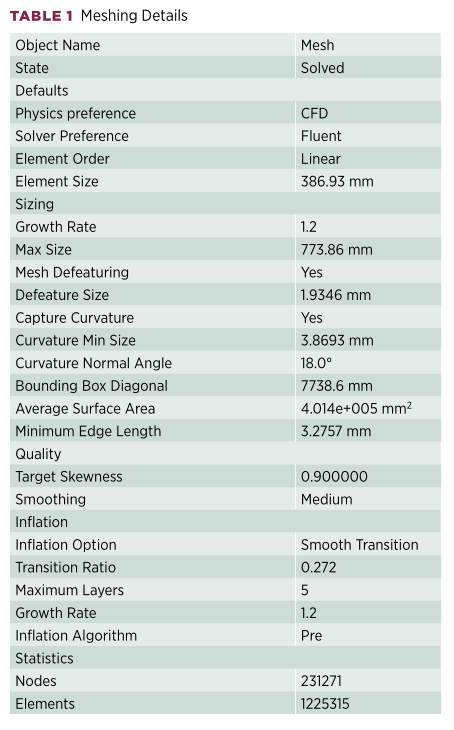
图1显示了元素数量和元素矩阵之间的正交质量图。它位于0(坏)到1(好)的范围内。从图中可以看出,网格元素数量在0.5 ~ 1范围内较多,网格质量较好。

车身气流分析 在这种情况下,空气被视为存在于计算域中的流体。考虑到所提出模型的复杂性,本研究将车辆的最高速度限制在100KMPH。在研究了任何商用车辆的平均速度被认为是64KMPH之后,获得了20KMPH到100KMPH之间的速度范围的阻力和升力。求解了1000次迭代,每次迭代耗时1秒。使用CFD post查看获得的结果,以便清楚地了解气流模式和其他参数,如涡流形成、流线和矢量。有了这些结果,车身的设计被一次又一次地调整和分析,直到达到最佳结果。
控制方程 剪切应力传输(SST) k-ω湍流模型被用于所有的分析,因为它被发现比其他湍流模型最准确,因为它能够预测带有逆压梯度的流动或带有分离和再附着的流动。剪切应力输运(SST) k-ω模型是一种两方程涡粘模型。这些方程采用混合函数,使不同k-ω模型在壁面附近和边界层外层之间逐渐过渡。壁面附近采用标准模型,外侧部分采用高雷诺数模型。文中还采用了一种改进的湍流黏度公式来考虑湍流剪应力的输运效应。
湍流动能

特定的耗散率
F1(混合函数)
注:F₁内附面层= 1,自由流中为0

运动涡流粘度
F2 (第二次绑定函数)
P(生产限幅器)

结果观察
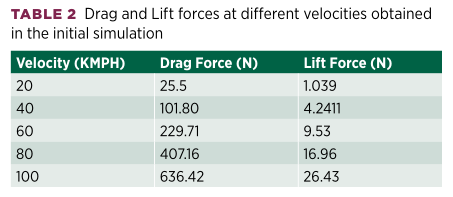
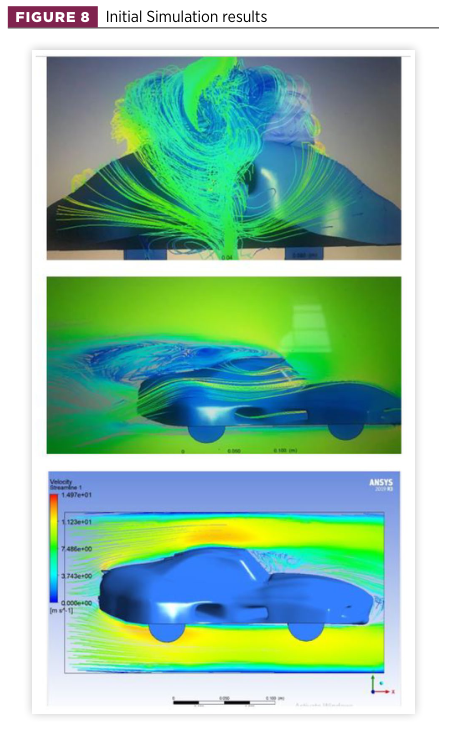
最初,在气动模拟中观察到,在车身表面附近有涡流形成,主要朝向车身的前后管道端。在车身的各个表面附近也观察到了流动分离。所有这些都导致车辆的空气阻力非常高。通过隧道的流量也非常低,不足以增强下压力和所需的发电量。所有这些流动干扰因素都可以在图8中清楚地看出。在初始模拟中获得的相应阻力和升力系数分别为0.51和0.2125。表2列举了初始模拟中在不同速度下获得的阻力和升力。
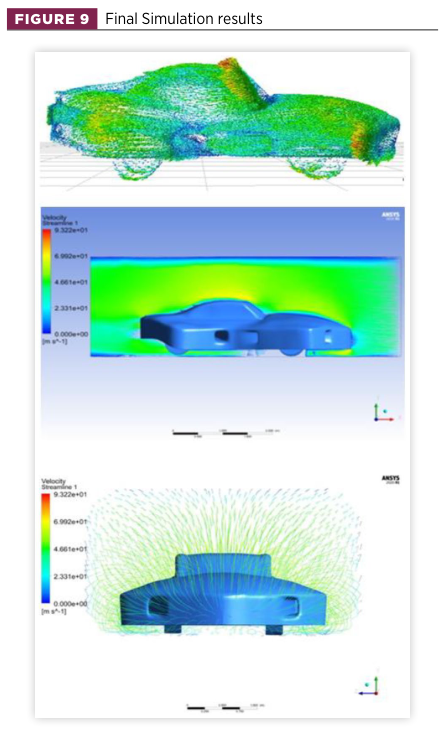
导致气流差异的所有车身部分都经过优化,使得气流模式主要是流线和速度矢量,如图9所示,非常干净且具有空气动力学效率,并且由于空气阻力而产生的阻力最小。
为了达到同样的效果,对几何形状进行了许多修改。这些修改包括减小机翼角度以在后部获得干净的气流,改变两个通道的迎角以增加它们内部的气流并随后增强下压力;前挡风玻璃在中间平面上有一个尖锐的曲率,导致气流向上而不是朝向挡风玻璃上方的结构体面板,导致该区域的流动分离,通过平滑中间平面中的挡风玻璃曲率来处理同样的问题。
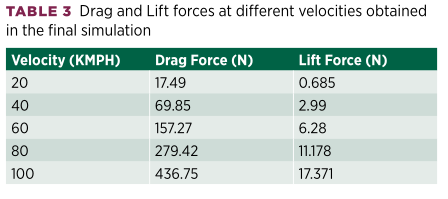
最终的模拟结果显示,阻力系数为0.35,升力系数为0.014,不同速度下对应的阻力和升力见表3。
验证
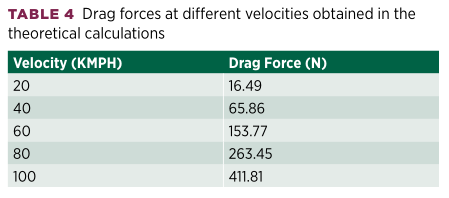
有一些公式可以计算任何车辆所受的阻力。为了验证计算流体动力学的结果,采用公式(8)从理论上计算了不同速度下的阻力。对某些几何形状的阻力系数进行了近似计算。考虑到此,本文对给定模型进行理论计算时,考虑阻力系数为0.33。用空气在流动过程中垂直撞击的面积来测量参考面积,得出为2.64mm2。
阻力

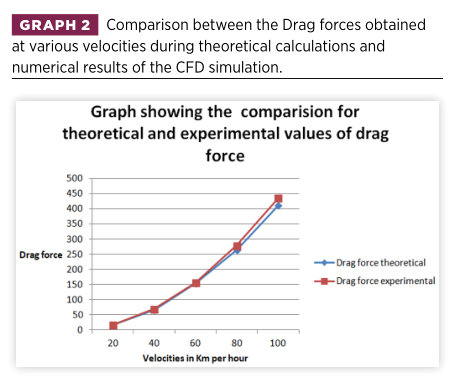
通过理论计算得到的不同速度下的阻力均列于表4。图2将得到的阻力理论值与最终模拟得到的数值进行了比较。
结论
本文研究了所提出的车辆设计的阻力计算和优化,以实现规整气流和车辆面临的阻力最小。本研究得出以下结论:
1.模型优化后阻力减小32.9%。
2.对车体进行优化,直到达到一个适当的流线型流动,旋涡最小,流动分离最小3.阻力系数和阻力分别为0.35和436.75N,升力为17.371N,非常低,因此有利于产生非常有效的下压力。4. 通过改变攻角优化其几何形状,增加了通过管道的气流,从而增强了下压力。5. 提出了一种在车辆运行过程中高效发电和充电的方法,消除了充电基础设施和充电过程冗余的问题。
文章来源:Moon, R.R., Prajapati, S., and MISHRA, P.R., "Aerodynamic Approach on Enhancing the Downforce in a Self-Powered Electric Vehicle," SAE Int. J. Advances & Curr. Prac. in Mobility 4(3):853-860, 2022, doi:10.4271/2021-26-0358.
本期内容相关推送文章汇总:
-
卡车减阻
通过CFD优化卡车拖车空气动力学设计|AutoAero202213期
-
风振、风噪主动控制
汽车风噪声及风振主动控制综述| AutoAero202215期(更正)
-
主动尾翼控制
采用主动尾翼控制改善赛车的安全性和横向动力学性能







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
