




 广告
广告





















































如何打造智能网联软件在环(SIL)测试验证新平台

随着自动驾驶等级的提高,汽车系统复杂性急剧增加,传统基于里程的实车道路测试已无法适应自动驾驶汽车日趋增加的测试需求,如何快速完成对自动驾驶汽车功能测试验证已成为行业内亟待解决的问题。目前基于场景的测试方法已成为行业共识,而虚拟仿真测试技术通过集成相关模型及软硬件,可对自动驾驶系统进行高效、安全、低成本、可重复性测试,故基于场景的虚拟仿真测试技术成为了自动驾驶汽车测试验证的重要关键一环。
在汽车V流程开发环节中,SIL(Software in Loop)软件在环测试应用于自动驾驶系统算法开发阶段,被测算法基于SIL仿真工具链构建虚拟仿真测试环境。SIL仿真工具链主要包括场景仿真软件、车辆动力学软件、自动化测试软件、通讯接口模型、数据转换模型等。首先将虚拟场景中的关键环境信息发送给被测算法,被测算法基于内部功能逻辑进行计算,输出车辆控制信息至车辆动力学软件,车辆动力学软件通过计算将位置、姿态信息反馈回虚拟测试场景中显示,从而形成测试闭环,在自动化测试工具中编写测试用例,依托标准法规中的评价指标验证自动驾驶功能逻辑的有效性。
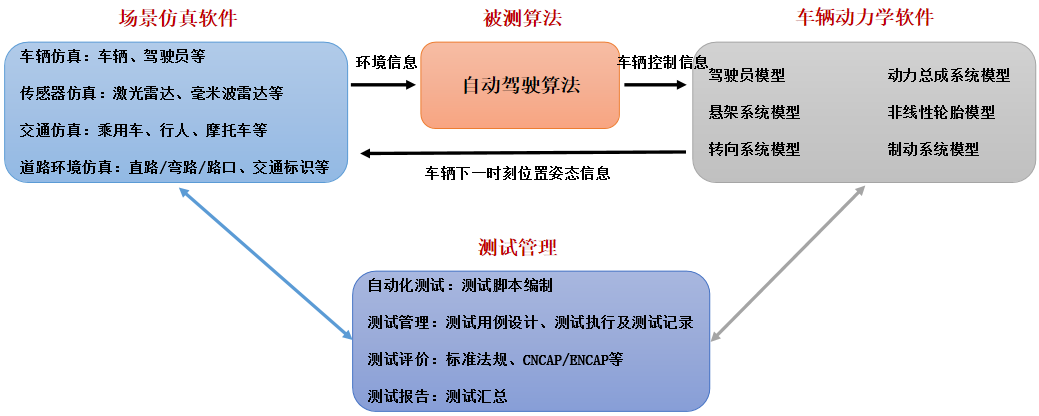
图1 SIL集成架构
一套完整的SIL仿真工具链集成环境构建主要包含如下几方面工作:
01虚拟测试场景构建
构建虚拟试验环境是进行软件在环测试的基础,其为被测控制算法的运行提供真实道路行驶的状态,根据道路测试时的智能网联汽车行驶条件,软件在环测试的试验环境应包括气象环境、道路环境、动态环境、交通流环境。
气象环境:包括环境温度湿度、光照条件、天气情况等信息。
道路环境:包括道路形状、路面情况、交通标志、交通表现和障碍物等信息。
动态环境:包括动态指示设施及通信环境信息。动态指示设施包含交通信号、可变交通标志和交通警察等;通信环境信息主要为车辆之间变化的通信状况。动态环境要素的真实性决定了仿真结果的可信度。
交通流环境:包含宏观交通流环境和微观交通流环境。宏观交通流环境表示一段道路内在一定时间内的整体交通情况;微观交通流环境表示被测车辆周围的车辆位置及其对应运动状态。




图2 针对多类仿真软件,中汽数据构建了近千种虚拟测试场景库以满足复杂场景测试需求
02车辆动力学模型参数配置
市场主流动力学软件可基于车辆总成特性建模,可以在车型开发前期还没有结构数据时,利用软件数据库建立基础车辆动力学模型并设置仿真工况。在数据库里有各种悬架、转向系统的样例模板并允许建立各种组件、车辆及测试结果的库文件,能够迅速地在所做的不同车型、不用工况仿真之间切换,对比仿真结果并作相应的修改,以便在产品设计初期更好地优化产品设计的性能。
03传感器模型开发
在对算法进行SIL仿真测试中,通过运用激光雷达、摄像头、毫米波雷达和超声波雷达等不同的传感器,主动感知周围的环境。通过收集数据、进行静态和动态的物体辨别、探测和追踪,并结合导航仪等地图数据,进行系统的运算和分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车行驶的安全性和智能舒适性。
在ADAS传感器感知方面,从环境场景中获取传感器前端的光、电、声信号,到数字信号处理后得到的飞行时间、多普勒频移等原始信号,最后经过感知算法和目标跟踪得到的目标列表信号,最后传给控制算法。
在传感器仿真时,可从原始数据模型和传感器目标列表模型两方面分别构建传感器仿真模型,满足不同应用场景测试需求。
原始数据模型:可以输出不同的物理效果,主要用于部件及原始信号处理开发与测试;
目标列表模型:生成的目标列表信号与传感器物理特性无关,容易配置参数,主要用于快速原型/概念验证。
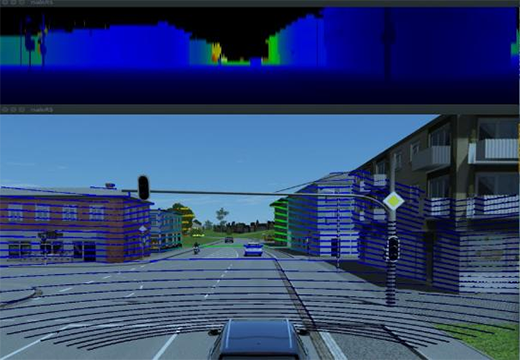



图3 基于仿真软件VTD,中汽数据完成激光雷达、摄像头、毫米波雷达及超声波雷达等多传感器原始数据仿真模型开发
04自动化测试与评价
根据被测算法的功能定义、测试规范及接口信息等,梳理测试功能点,结合自然驾驶场景数据、标准法规等生成的虚拟测试场景编写相关测试用例。基于ISO、C-NCAP、E-NCAP等权威测试评价规程完成被测算法的功能评测。
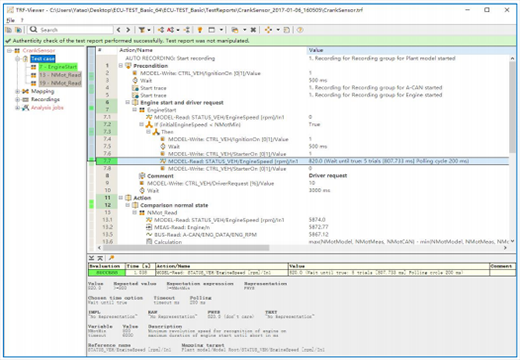
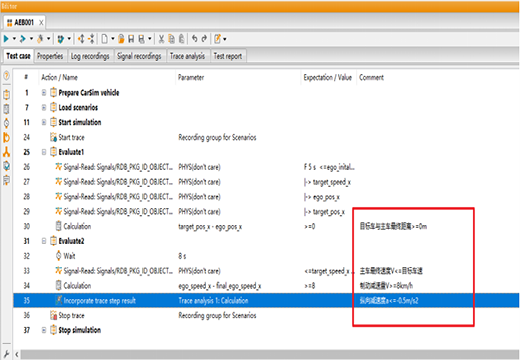
图4 依据权威测试评价规程,中汽数据构建了多指标多维度仿真测试评价体系
随着智能驾驶仿真技术不断应用升级,智能驾驶功能测试必将越来越复杂,SIL软件在环测试凭借高效便捷的优势,可极大地提升测试效率,在功能设计开发初期尽早发现系统缺陷,缩短开发周期。中汽数据有限公司基于多年来的虚拟仿真工程经验已为国内多家车企提供了从场景库构建-仿真平台集成-仿真验证MIL/SIL全链条完整的智能网联汽车仿真方案。在MIL/SIL仿真验证方面提供了多类型传感器仿真模型开发、仿真平台闭环调试及多维度仿真测试评价等工作,实现对自动驾驶功能高效、快速的闭环仿真测试。
- 下一篇:汽车悬架衬套静动特性分析中缩径量影响研究
- 上一篇:广汽自动驾驶技术创新突破







最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
