




 广告
广告





















































自动驾驶硬件预埋之后,车企如何实现数据闭环?

硬件预埋是自动驾驶趋势下车企主机厂采取的新模式,即通过在车内进行硬件预埋,后续汽车只需通过不断地升级软件,用户就可以获得更好的使用体验,同时降低主机厂车型上市时间的压力。硬件预埋与OTA远程升级有着必要性的联系,说完硬件预埋,会再聊聊OTA的原理。
在此之前,我们先把硬件预埋、OTA都摆脱不了的一个话题——车企研发时的数据闭环是如何实现的?
硬件预埋与OTA那点事,出门左拐,可以看到船尾之前梳理的内容。
言归正传,回到本期主题:自动驾驶硬件预埋之后,车企如何实现数据闭环?
只需5步,实现数据闭NI提出数据采集/处理5步法,打造数据闭环:
-
道路测试
-
大数据管理
-
场景虚拟化
-
数据开环回灌
-
数据闭环
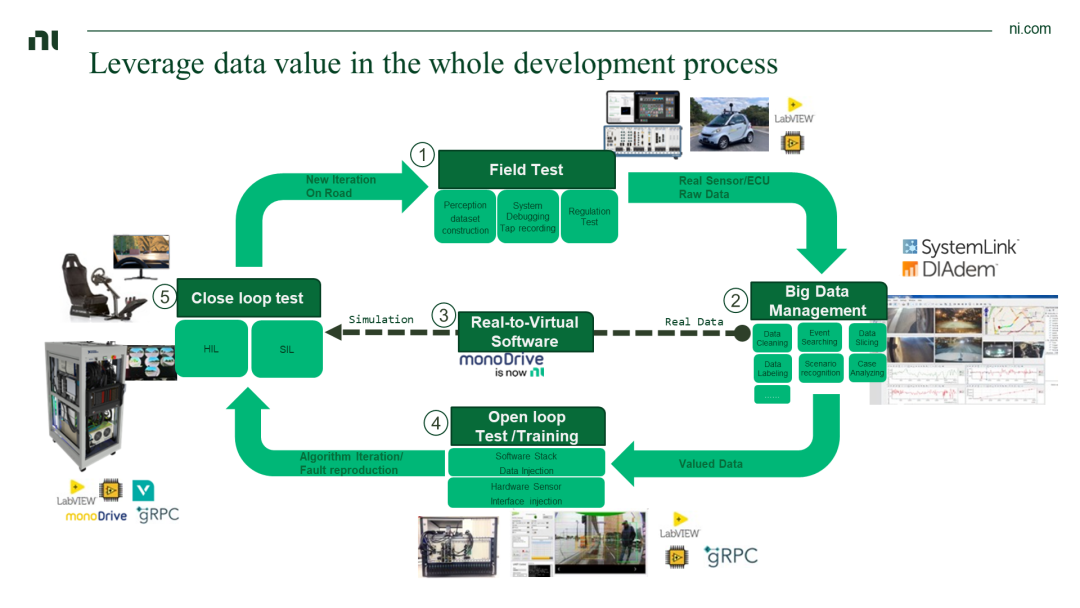
从数据采集到数据闭环,就5步
1道路测试——Data Record System AD
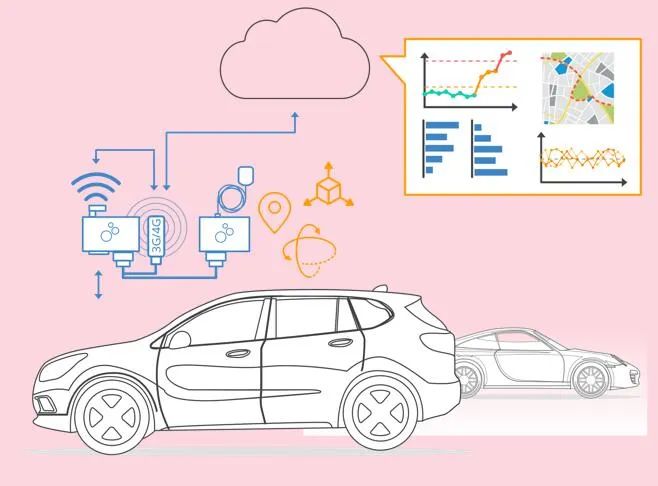
道路测试是收集真实场景数据的重要来源,无论是车内通信还是车路通信,都需要处理大批量的数据,自动测试系统中一般需要配备数据采集同步和存储设备。
自动驾驶汽车到底需要哪些类型的传感器?
自动驾驶汽车是集感知、决策和控制等功能于一体的自主交通工具,其中,感知系统代替人类驾驶人的视、听、触等功能,融合摄像机、雷达等传感器采集的海量交通环境数据,精确识别各类交通元素,为自动驾驶汽车决策系统提供支撑。
1、摄像头
摄像头按视频采集方式分为:数字摄像头和模拟摄像头两大类。
车载上一般使用的是数字摄像头,它可以将视频采集设备产生的模拟视频信号转换成数字信号,进而将其储存在计算机里。
模拟摄像头只能将捕捉到的视频信号,经过特定的视频捕捉卡将模拟信号转换成数字模式,并加以压缩后才可以转换到计算机上运用。
举个例子来,我们使用的固定电话就属于模拟信号,它在通话过程中容易产生噪音(电流声或听不清)的情况。而我们的手机为了保持很好的通话质量,就将电话的模拟信号进行了数字化,手机之间的通话质量就非常清晰,同样原理使用数字摄像头能有效减少图像中的噪点和提升成像效果。
一句话概括:模拟视频信号是在一定的时间范围内可以有无限多个不同的取值。而数字视频信号是在模拟信号的基础上经过采样、量化和编码而形成的。模拟信号容易产生信号噪音和干扰,已逐步被数字信号取代。

图片来源:博世官网
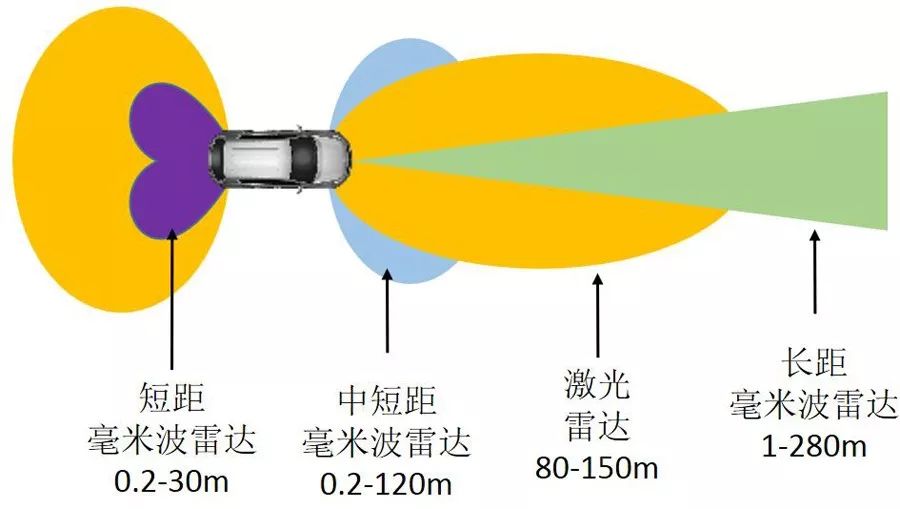
2、雷达
雷达能够主动探测周边环境,比视觉传感器受外界环境影响更小,是自动驾驶汽车的重要传感器之一。雷达通过向目标发射电磁波并接收回波,从而获取目标距离、方位、距离变化率等数据。根据电磁波波段,雷达可细分为激光雷达、毫米波雷达和超声波雷达等3类。
NI提供的基于PXI平台的模块化数据采集方案,可以满足多路摄像头、车载以太网、CAN/CANFD、GPS等的数据采集,还能满足不断阶段的数据采集需求。比如,ADAS域控制器已经基本在研发和迭代的阶段,可以通过数据旁通采集的方法,将NI测试设备作为一个中间件,从中间把数据采集回来,这样就不会破坏掉传感器到ECU的数据链路。此外,NI的解决方案支持15TB~200TB的数据存储容量。
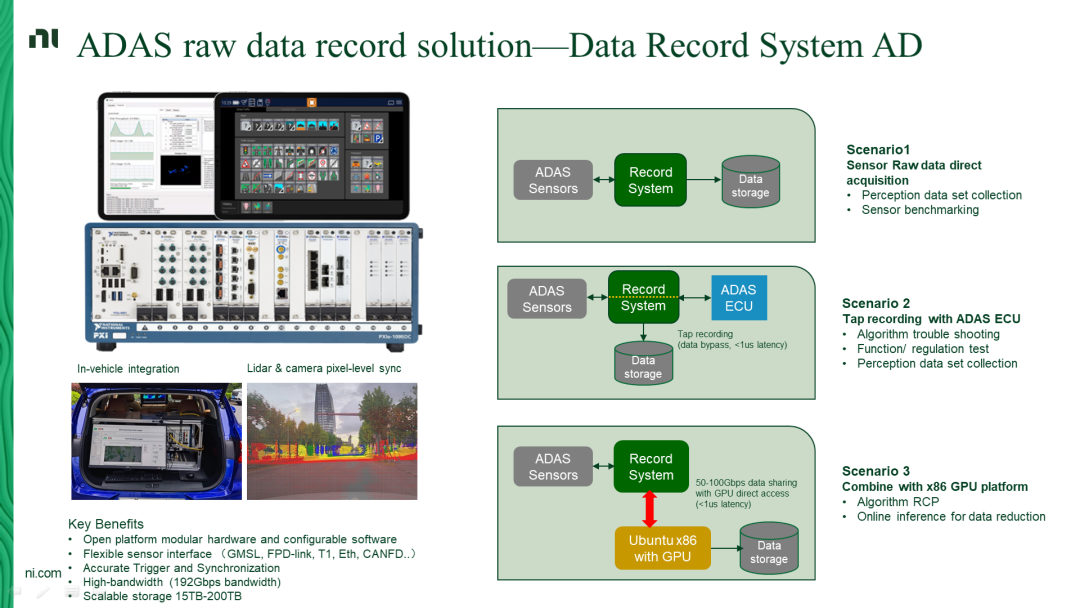
为了保证采集数据的准确性,用于记录数据的车辆,需要配备满足其智能驾驶特定等级的传感器和测量技术。主要的传感器类型包括摄像头、毫米波雷达和激光雷达。系统的核心是融合控制器,它获取所有传感器的数据并实时计算当前环境模型,然后用于控制驱动、转向和制动系统。
满足各种传感器、ECU和通信数据记录的高性能数据采集系统需要专门为连续运行而设计,提供高可靠的RAID存储设备,可以测量摄像头、毫米波雷达,激光雷达原始数据,具备测试融合控制器,还包括附加的参考摄像头视频数据以及提供车辆精确位置的惯性导航系统数据和车载以太网、CAN、CANFD、FlexRay等众多总线数据。
2大数据管理——DIAdem
从流程上说,大数据管理分为车队管理、数据中心、终端数据使用三部分。从车端向数据中心传输数据的过程中,普遍采用的是数据搬移等回传方式,数据量可达到10-100TB/每辆车/每天。反过来,数据中心还能对车端实时监测,这部分主要是通过车载4G 或者5G网络完成。
不同等级阶段的车辆,需要采集的数据量也呈现几何级增长。以目前常见的L3阶段为例,随着4K超高清摄像头、128线激光雷达等传感器引入,每天8小时数据采集系统记录的数据量高达30TB。
采集系统需要提供高带宽、高容量的数据存储,同时还需要考虑如何将数据简便的方式将数据传输到数据中心。比如通过专门的数据上传机将数据传输到容量为PB级别的数据中心。
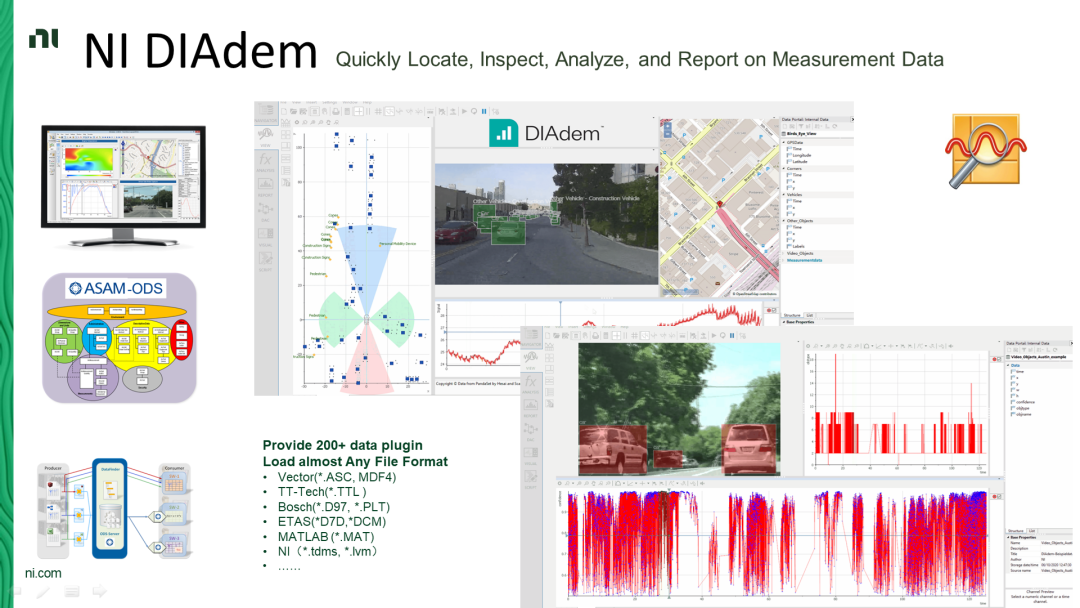
除了这些基于云的工具之外,这里再强调一个数据挖掘神器——DIAdem。它可以部署在云端,针对路试数据、多源的数据图像、点云的以及一些总线的数据实现相应的数据可视化和数据挖掘的工作。DIAdem可提供200+数据插件,兼容多种类型的测试厂商的数据格式,比如说ASC, MDF4、TTL、MAT 等。
3场景虚拟化——monoDrive
通过道路试验采集数据之后,就要对数据进行清洗分类、场景选择,最后将真实道路试验和虚拟仿真试验结合在一起。monoDrive就是这样的工具,可以实现高保真的传感器物理建模,场景语义分割,同时还支持云仿真的功能,可以把大量的测试用例,部署到云上面,来加速仿真的进度。monoDrive的另外一个重要优势是realto virtual场景自动生成的扩展功能。
值得一提的是,在场景重建或者是传感器建模的过程中,NI可以把真实的传感器数据跟虚拟的传感器数据做相应的标注。
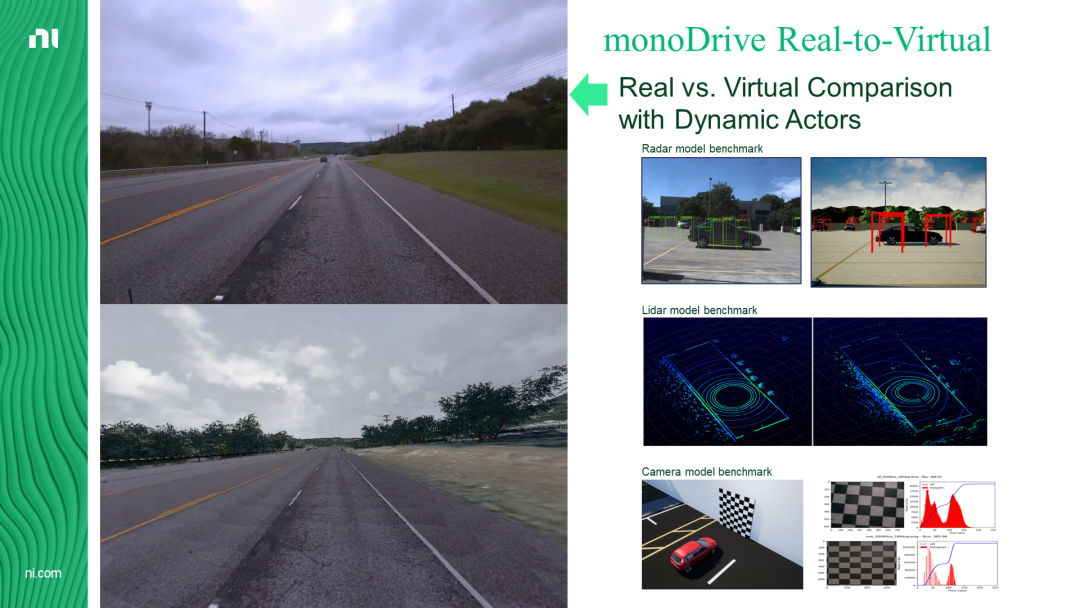
实车数据转化为仿真场景的工具,基于大量实车数据积累,实现数据驱动的研发模式。

▲ 采集场景转换效果
工具链支持将巨量动态数据和静态数据排列组合,解决了案例设计跟实际情况偏差较大的问题,让自动驾驶的模拟仿真更贴近真实世界。

▲ 语义场景转换工具链
4数据开环回灌——基于PXI平台的系统架构
这个步骤要做的是把原始数据回灌到ADAS感知软件中,一部分是直接回灌到software stack 去做一些软件回灌,主要是针对一些模型的测试部分。还有一部分是直接回灌到真实的ECU,这可以更真实地复现我们在路试过程中去发现的一些情况。
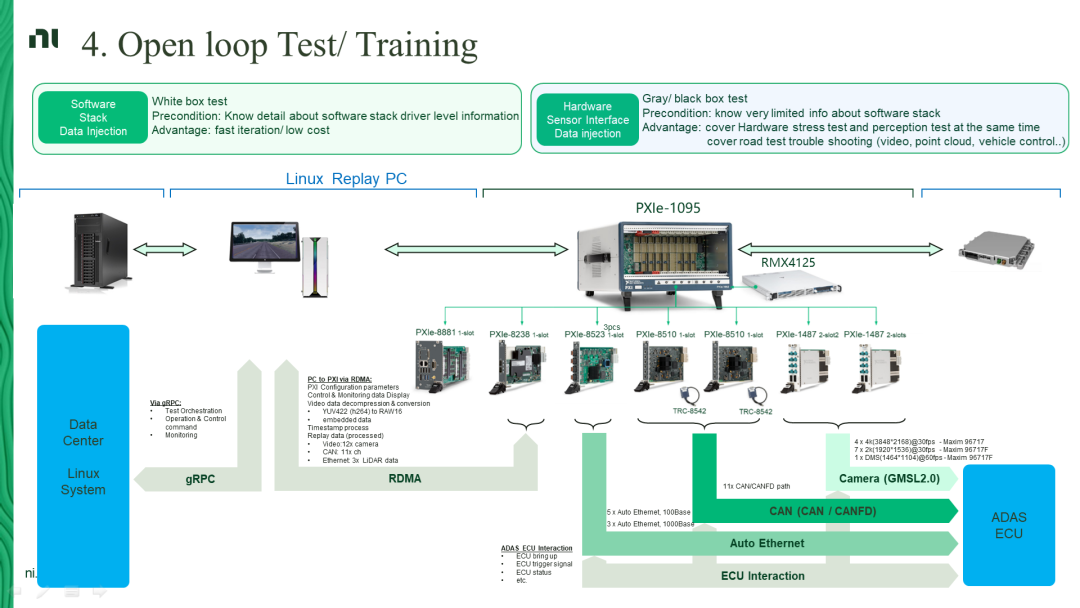
NI系统架构的组成:用户数据中心、基于Linux 平台的Replay PC、NI PXI 平台
为了形成一个数据闭环,充分利用原始数据的价值,越来越多的车企都在构建这样的一个集群式数据回灌系统。很多车企在定义AEB功能的时候,通常他们会要求AEB 功能是10万公里或者 20万公里不能产生误触发。
举一个例子——
假如在路试的过程中跑了8万公里,突然产生了一次误触发,这个时候就要回去修改相应的软件。修改软件之后,是否还需要再重新跑一个10 万公里呢?显然重头来做会浪费大量的额时间和经历。
面对这样的挑战,有什么有效的方法呢?
王帅解释道:“如果在第一次路试时候跑到8万公里发生了问题,但是能保证前面的里程的数据都被记录下来了。那么一旦发现了问题之后,我们去迭代修改软件。修改软件之后,我们就利用原来采集的原始数据去做一个回归测试,测试一下软件修改之后在原来的这些数据上面能不能正常的运行。这就减少了我们在路试上的投入,从而加快开发速度。”
5闭环测试——SIL和HIL
闭环测试通常包括软件在环(SIL)和硬件在环(HIL)。在软件在环这块,NI的方案是利用monoDrive平台提供一个可以实现在云上批量部署的环境。在硬件在环这块,NI的方案是利用PXI平台,同时利用NI在摄像头、车载总线,及数据同步等方面的优势实现多种类型传感器的带有数据注入功能的闭环系统。
- 下一篇:燃料电池最全科普
- 上一篇:直播 | 动力电池关键技术创新



编辑推荐




最新资讯
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
-
基于不同控制算法的半主动悬架仿真研究
2025-04-11 10:20
-
不允许起火爆炸,GB 38031《电动汽车用动力
2025-04-11 10:15
