




 广告
广告





















































Prescan与Amesim联合仿真(一)——坐标系定义

1.概述
本系列教程主要目的为介绍Simcenter Prescan与Simcenter Amesim进行车辆动力学相关的联合仿真联合仿真时,需要对模型接口进行的修改,以正确完成模型闭环仿真。本文为SimcenterPrescan与Simcenter Amesim联合仿真系列教程的第一讲,着重介绍上述两个环境下车辆相关的坐标系及其定义,以及如何进行调整才能构建正确的信号连接。介绍内容主要针对车辆位置和姿态信息。为说明车辆位置和姿态信息在两个软件中的区别,首先介绍Simcenter Prescan和Simcenter Amesim中的坐标系定义。正确理解两个软件中对坐标系的定义以及相互转换关系对于模型的集成和调试非常重要。
2.坐标系介绍
2.1.Prescan中的坐标系
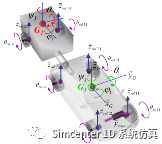
Prescan中共用到3个坐标系:Global axis system, Initial local axis system, Current local axis system。关系如下图所示:
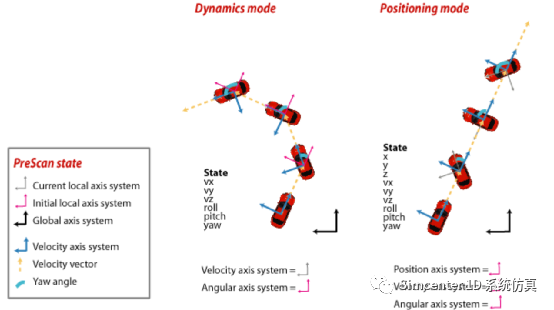
2.1.1.Global axis system
Global axis system即通常所谓的伽利略坐标系(Galileanframe),指固定于地面原点,方向不变。参考Amesim中的Galilean frame。
当在Prescan GUI中拖放物体时,相应的Global坐标也就确定了,可以通过右侧属性栏编辑修改位置。
2.1.2.Current Local axis system
Current local axis system即通常的车身坐标系(Car body frame)。该坐标系原点位于车辆质心处,而车辆质心是根据车辆后轴中心在地面的投影处的相对位置定义的。位置与方向随车辆运动实时发生变化。
用户根据该坐标系原点位置给出车辆的质心位置,以及初始的方位角。
2.1.3.Initial Local axis system
Initial local axis system即车辆的初始位置坐标系。该坐标系原点位于车辆初始位置质心处,而车辆质心是根据车辆后轴中心在地面的投影处的相对位置定义的。位置与方向不随车辆运动实时发生变化。该坐标系通过Global axis system绕XYZ3个轴分别旋转3个初始欧拉角再分别平移3个初始位移后得到。换言之,Global axis system只有一个,而每辆车都有自己的Initial local system。
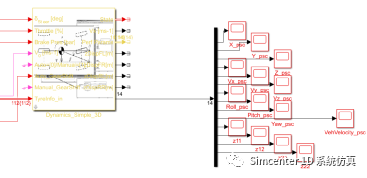
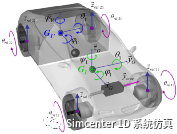
Prescan中3D车辆动力学模型的ContactParams端口输出的坐标值即在Initial local system下的坐标。该端口输出车辆在初始坐标系下:位移[3]/速度[3]/欧拉角[3]/x轴向车速/轮心高度[4]。用于计算轮胎与地面接触的相关信息。如下图所示:
2.2.Amesim中的坐标系
2.2.1.底盘相关坐标系
Amesim中乘用车3D车辆动力学模型可提供多种车辆动力学模板15DOF,18DOF,22DOF。
以下通过最常用的15DOF模型做介绍。
2.2.1.1.Galilean frame——R0
Galilean frame指伽利略坐标系。指固定于地面原点,方向不变,在Amesim中通过R0表示,参考Prescan中的Global axis system。需要注意的是,由于Prescan和Amesim都可以定义车辆在伽利略坐标系中的初始位置,两者的初始位置并不一定非要定义成相同值,因此两个软件计算出的伽利略坐标系位置也不一定相同。这里推荐将Amesim中车辆的质心初始位置定义为[0,0,Zini]。即令Amesim的Galileanframe与Prescan的Initial local axis system在XY平面上重合,而Z方向上Initial local axis system原点与车辆质心重合,Amesim的Galilean frame原点在车辆质心的地面投影处,这样做是为了方便后续的集成工作。
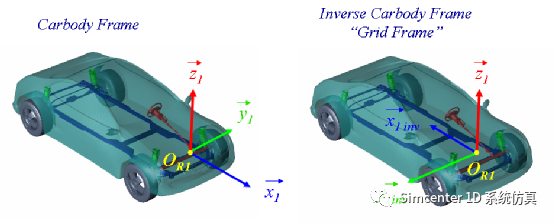
2.2.1.2.Car body frame——R1
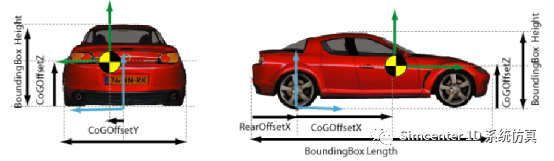
Car body frame指车身坐标系。即通常的车身坐标系。该坐标系原点位于车辆前轴中心处。位置与方向随车辆运动实时发生变化。Car body frame在Amesim中可以配置成两种方向:
Ø Car body frame——国际标准的坐标系。Ø Inverse car body frame——也称为Grid frame。即Car body frame绕Z轴旋转180度。
通常在Amesim模型中习惯采用该坐标系定义质心的位置等车辆尺寸信息。区别如下图所示:
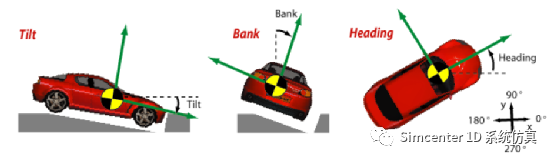
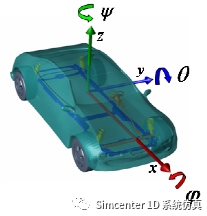
用户根据该坐标系原点位置给出车辆的质心位置,以及初始的方位角。Carbody frame相对于Galilean frame有6个自由度。如下图所示:
2.2.1.3.Spindle frame——R2
Spindle frame指簧下质量坐标系。可以理解为原点位于悬架弹簧下端点。相对于车身坐标系只有Z轴方向的线运动自由度,其他5个方向的运动皆被Z轴方向的线运动和方向盘转角(K数表)和轮心力(C矩阵)所决定。
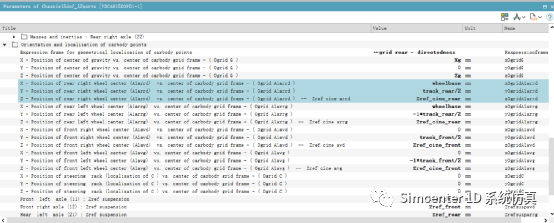
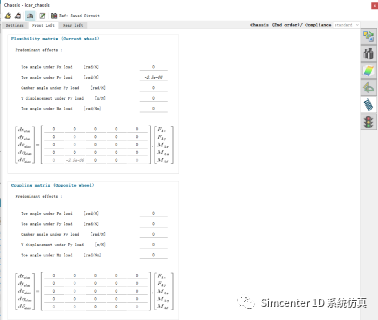
Spindle frame相对于Car body frame的位置关系由以下组成部分:
1)定位参数,如下图所示:
2)运动学变化量(K数表),如下图所示:
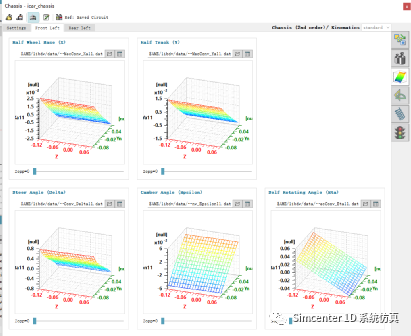
3)柔性变化量(C矩阵),如下图所示:
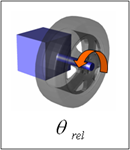
2.2.1.4.Wheel frame——R3
Wheel frame指车轮坐标系。该坐标系原点位于车轮圆心位置初始方向与Spindle frame保持一致(用户可设初始偏置),仅有绕Y轴旋转方向上的自由度。
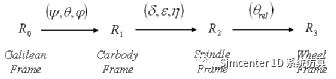
2.2.1.5.坐标系关系
伽利略坐标系、车身坐标系、Spindle坐标系、车轮坐标系之间的关系,如下图所示:
2.2.2.轮胎相关坐标系
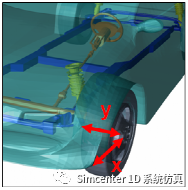
2.2.2.1.Tire frame——Rw
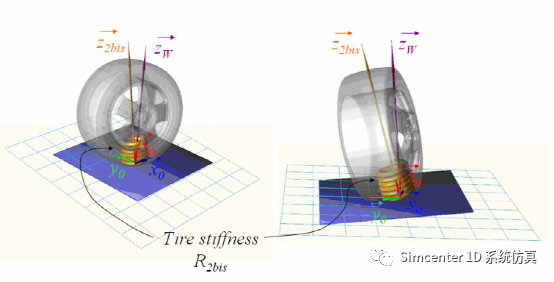
Tire frame指轮胎坐标系也称为Steered non cambered frame。其原点位于轮胎与地面的接触点,Z轴与地面方向向量Z轴重合,X轴与前轮平面平行。如下图中紫色部分所示:
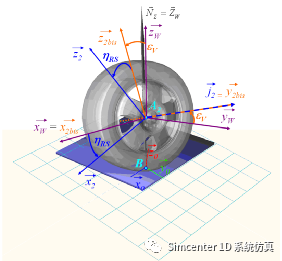
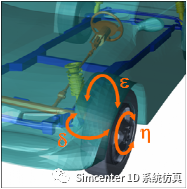
2.2.2.2.Steered cambered frame——R2bis
Steered cambered frame指轮毂坐标系。Tire frame绕X轴转过一个车轮外倾角(camber angle)得到。Steered cambered frame转过一个车轮自旋角即得到Spindle frame。如上图所示。
2.2.2.3.坐标系关系
Tire frame和Steered cambered frame关系如下图所示:
3.结语
本文针对SimcenterPrescan和Simcenter Amesim中坐标系进行了详细介绍,正确理解车辆及其相关坐标系的定义有助于模型创建者快速准确地完成传感器及环境模型与车辆动力学模型闭环搭建,是进行高精度车辆动力学模型闭环仿真的基础。
欢迎联系咨询:
-
作者:高琢
-
Email:zhuo.gao@siemens.com



编辑推荐




最新资讯
-
ESI 全新BM-Stamp软件在汽车行业冲压仿真精
2025-04-02 09:27
-
车辆软件测试工程师的工作内容---解读GBT德
2025-04-02 08:41
-
浅谈机动车检测行业合规经营与检验人员职业
2025-04-02 08:40
-
NOA该允许驾驶员脱手么?
2025-04-02 08:37
-
联合国最新汽车法规清单(到R176)
2025-04-02 08:31
