




 广告
广告





















































中汽中心工程院技术快报 | 分布式驱动汽车轮边/轮毂电机矢量控制技术

近年来,随着国家电动汽车发展战略的提出,集成化、轻量化、模块化、高可靠性已经成为了电动汽车驱动系统技术的主要研究方向。
分布式驱动系统由两个或多个驱动电机独立驱动各自车轮,取消了中间差速器力矩传递,具有传动链短、结构紧凑以及改善轮胎附着力分配与驱动效率等优势,能够大幅提高电动汽车整车综合性能与能源利用率。
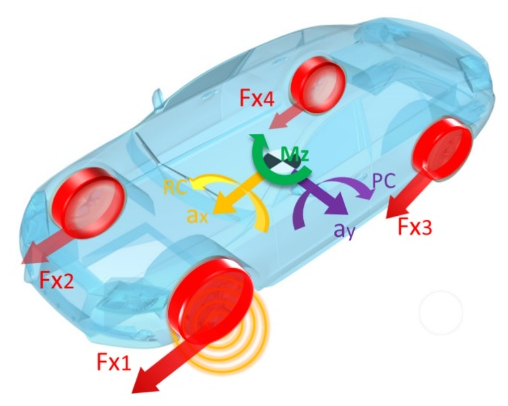
图1 - 分布式驱动汽车行驶示意图
然而,分布式驱动汽车行驶工况、运行模式以及结构参数等变化会对车辆动力学特性产生巨大影响,若车辆底盘中存在耦合或重叠的各子系统缺乏协调控制,必将导致某些复杂行驶工况下车辆综合性能的恶化,甚至失稳。为有效提升分布式驱动电动汽车底盘耦合系统的行驶安全性、操纵稳定性、平顺性及驱动性能,需对其多源激励耦合机制及运动形成机理展开深入科学研究,解决底盘耦合系统动力学性能协同优化及其域控制设计面临的关键问题。
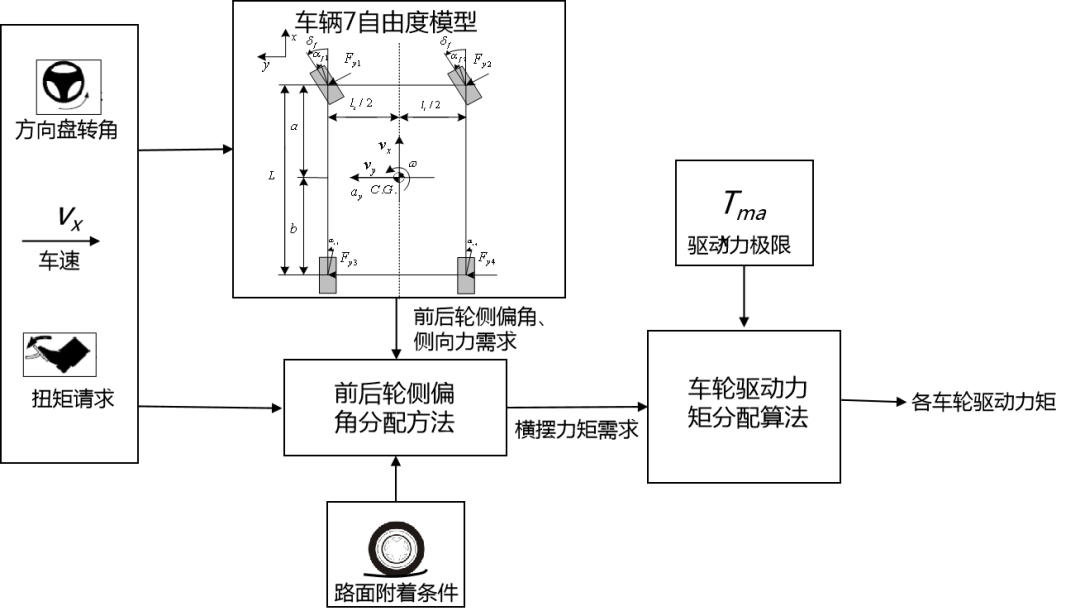
图2 - 四轮分布式驱动扭矩矢量分配原理
中汽中心工程院线控底盘团队立足于智能电动汽车通用底盘共性技术,为解决分布式驱动电动汽车底盘构型设计与整车性能高效匹配及协同优化的问题,重点研发了智能电动汽车线控底盘矢量域控制核心算法及其通用模块化底盘载体平台。

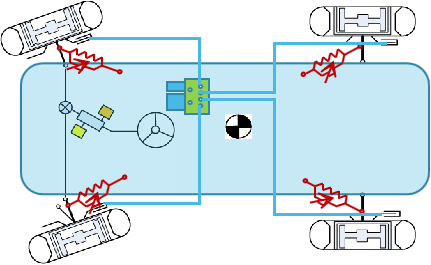
图3 - 四轮分布式驱动扭矩矢量控制试验平台
该平台可有效支持分布式驱动电动汽车底盘系统多向耦合精细化建模及相互运动形成机理分析、新型底盘结构匹配设计、底盘协同控制算法搭载、域控制器开发与功能验证等技术实施,支持分布式驱动电动汽车矢量域控制核心算法在现有新能源电动汽车分布式改装基础上的迭代开发及试验验证。
基于车辆动力学性能属性,探索多源激励工况下轮边/轮毂电机动态响应与多结构耦合机制,建立分布式驱动电动汽车多向耦合动力学精细化模型,研究新型底盘系统多场耦合运动形成机理及其优化匹配设计
分析复杂行驶工况下系统多向耦合性能协调关系,利用状态识别等算法进行底盘系统多向耦合性能的协同优化控制
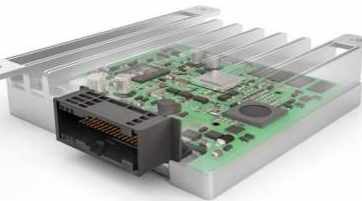
基于一体化机电驱动/制动模块总成控制器构架,开发新型底盘耦合系统域控制器,并实现底盘协调控制算法调试与实车性能验证
中汽中心工程院线控底盘团队将始终致力于线控底盘技术研发,持续为客户提供优质的服务。



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
