




 广告
广告





















































车载摄像头的防污设计

01车载摄像头是自动驾驶汽车的重要传感器,在自动驾驶汽车中车载摄像头作为采集信息和分析图像的主要途径,可以实现物体设别、可通行空间识别、车道线识别等一系列功能。车载摄像头主要包括内置视摄像头、后视摄像头、前置摄像头、侧视摄像头、环视摄像头等。在当今时代,安装在自动驾驶汽车上的摄像头已经成为了现代汽车的眼睛,没有它们自动驾驶也就无法实现,而摄像头这类视觉感知硬件工作过程中必须保持清洁,才能正常的工作。但是车载摄像头往往无保护的暴露在各种自然环境中,从开发角度讲如何最大程度的减少其工作中的污染程度是开发工作者需要考虑的重要课题。
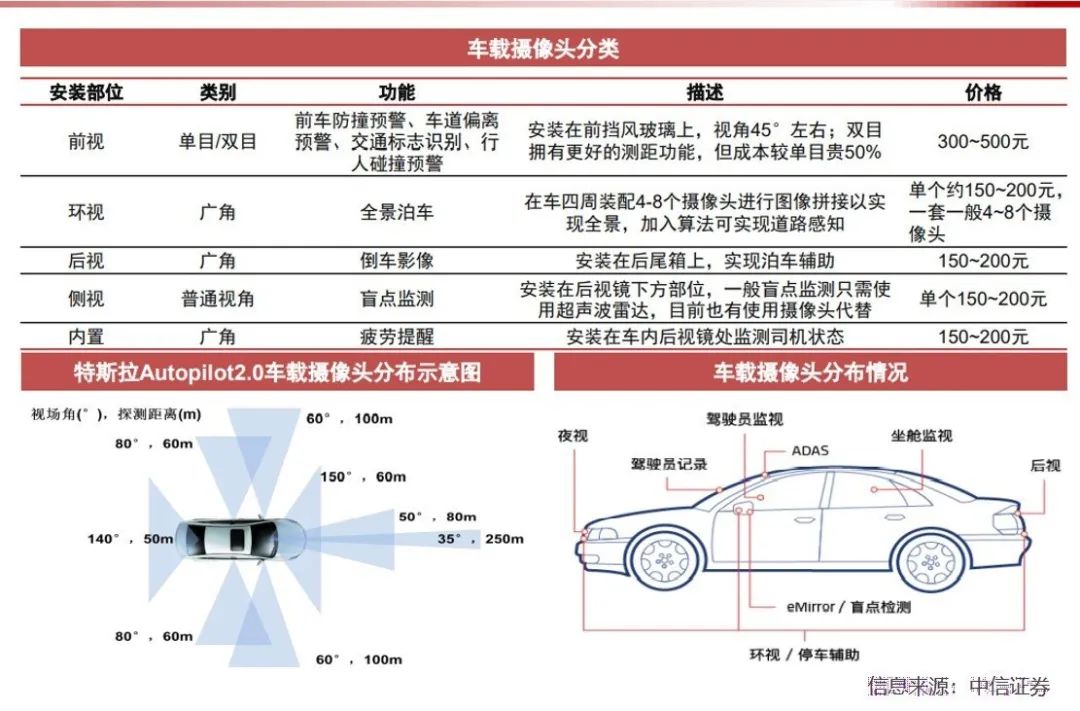
图1 车载摄像头分类及分布情况(图片源自网络)
减少摄像头污染的常规方案
02雨雪、雾沙、尘霾都会使得摄像头识别能力降低,而道路行驶必然会遇到尘土、水和其它污染。我们不能阻止这种情况发生,但是我们可以设计出性能更好的车辆,以降低污染物对车辆的影响。有些方案可以保持或助力摄像头的清洁,例如用喷射水流清洗镜头,或是在镜头上镀膜。然而镀层并不耐久且成本高昂,而采用清洁方案则会增加重量,从而降低燃油效率、增加运行成本。作为这种方法的替代,可以在设计阶段利用虚拟仿真的手段模拟车辆污染分布以及污染路径,进而优化传感器位置或者建议车辆进行设计调整,进而尽可能避免摄像头污染。随后还可以对摄像头局部造型进行调整进而影响污染沉积。最终目的是开发出造型最优的摄像头并保证其放置在最佳位置,尽可能避免污染或减小污染积淀。
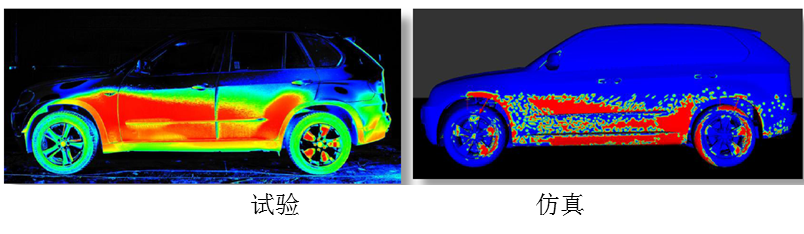
图2 试验及仿真结果对比
污染虚拟仿真介绍
03车辆在环境较差路面上行驶,由于车轮旋转、周围气流从路面卷起,而来自车体下方的空气往往夹杂着尘土、碎石、污水等颗粒,随着行程累计其带来的污染、冲击会直接影响摄像头的可视性,进而造成安全隐患。路面自污染工况较为明确,其为整车污染的最典型工况,而车辆自污染最为严重的侧壁以及车辆尾部又为摄像头重点布置区域,因此自污染虚拟仿真对摄像头污染分析最为迫切。
车辆自污染虚拟分析的主要技术点包括外流场分析、离散相喷射模拟、液膜模拟、湍流模型的选择等,分析方法包括格子波尔兹曼法(LBM),该方法主要优势是无需网格离散,前处理便捷,并且国外主机厂已有相关应用,主要商用软件包括Power flow、X flow等;另一类方法基于有限体积法(FVM),Starccm+、Fluent等经典CFD软件供应商已提供类似应用,基于该方法需要网格离散,建模时间较长。但两种分析方法均能预测固体颗粒在车身表面的沉积浓度分布、运动轨迹,进而提供优化摄像头的布置位置的思路,降低其被污染、破坏的概率。
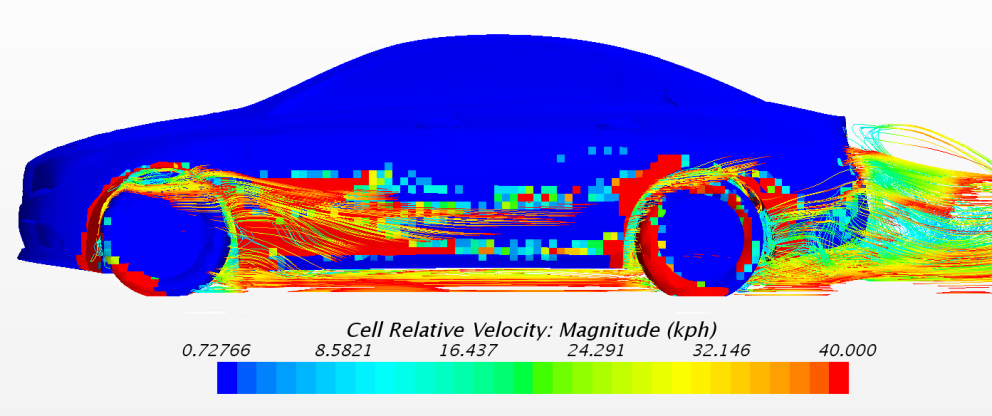
图3 侧面自污染虚拟仿真
小结
04现阶段智驾产品测试无特定天气、路面等要求,测试环境随机,摄像头功能失效阀值也尚处于研究阶段,因此虚拟仿真得到的摄像头区域的污染分布虽然可为前期摄像头的布置提供支持,但量化评价还需推动产品测试环境标准化、产品性能评价指标明确化等研究工作的进一步落地。
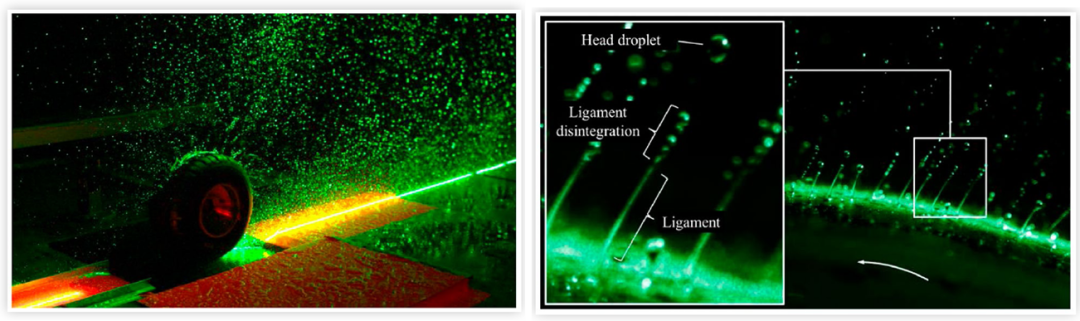
图4 自污染机理及入射定量试验研究
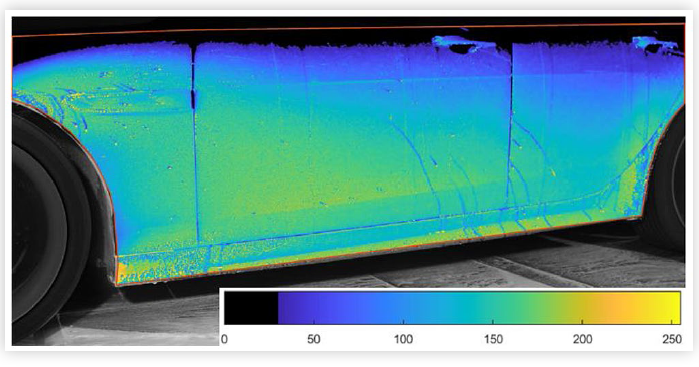
图5 基于荧光法的污染物沉积定量研究
参考文献
[1]:Experimental Investigation of the Droplet Field of a Rotating Vehicle Tyre. Published 2019-06-18 by SAE International in United States.
[2]:Advances in Experimental Vehicle Soiling Tests. WCX 2020 SAE World Congress Experience.
[3]:From Soiling to Stone Chipping – Simulation of Particle Trajectories and Impact in Time Averaged and Transient Flow Fields around Vehicles.



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
