




 广告
广告





















































采用主动尾翼控制改善车辆横向动力学性能

1.引言
赛车在任何赛道上的前进速度每年都在增加,随着速度的提高,安全性值得更多关注。同时,改善道路基础设施提高了汽车的平均前进速度,车辆和驾驶员的安全成为一个更重要的问题。虽然已经采取了各种措施来提高车辆的速度和安全性,例如减阻、改进轮胎设计、提高驾驶舱/座舱的安全性和安全气囊的部署等,本文介绍了一种利用气动力来改善横向动力学和安全性的控制策略:汽车采用主动分离式尾翼,利用线性化的车辆模型,设计了一种基于线性二次型调节器(LQR)的控制器。它可以在不降低车辆纵向动力学性能的前提下,提高车辆在急转弯时的横向稳定性。

图1 传统汽车尾翼
主动分离式尾翼由传统赛车尾翼改进而来,主动尾翼可以自适应地调整汽车尾翼角度,以有效地减少气动阻力,并产生所需的升力/下压力,下压力可能会对车辆的动力学产生多方面的影响。下压力可能会增加车辆的横摆和侧倾稳定性;由于驱动轮的法向力增加,下压力也可能导致牵引力增加;此外,如果机翼分裂,可以通过操纵机翼左右部分的迎角来产生有利的偏航和侧倾力矩,从而提高车辆的安全性。
2.车辆动力学系统模型
为了设计动态控制系统,对车辆进行数学建模是设计其控制系统的第一步。图2显示了带有分离式后翼的简化车辆模型。
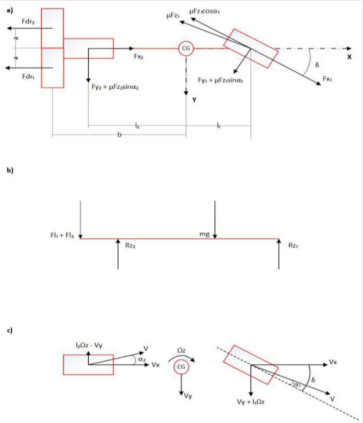
图2 a)通过轮胎和机翼作用在车辆系统上的力;b)施加在车辆系统上的垂直力;c)车辆系统的运动学分析
如图所示,车辆系统的运动控制方程可以表示为:

式(1)和(2)中的参数定义如图2所示。方程(1)和(2)表示的车辆模型与传统自行车模型的不同之处在于,考虑了Fdr1和Hdr2的气动阻力,以及Fz1和Fz2的下压力。
前后轮胎的侧偏力可以表示为轮胎的侧偏刚度和侧偏角的函数:

其中,前后侧偏角可分别被表示为

对图2 b)中的和处分别求矩,则可得前后轮胎所受纵向力为:
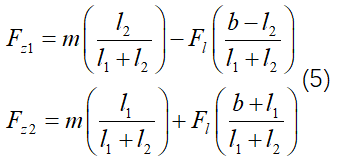
其中,Fl=Fl1+Fl2。
在空气动力学中,由于任何物体上的阻力和升力可表示为阻力和升力系数、流体密度、相对速度和物体投影面积的函数,则汽车尾翼受力表达式如下所示:
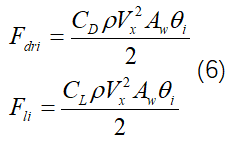
其中,i=1,2分别表示尾翼右和左侧两部分。将式(3)-(6)带入式(1)和(2)中,即可解得:
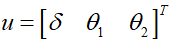
定义状态向量为

,输入向量为
。其中,Vy表示汽车横向速度,Ωz为车辆横摆角速度,y为车辆横向位移,Ψ为车辆横摆角,δ为前轮转角,θ1和θ2分别表示为汽车右尾翼和左尾翼的迎角。
由于式(7)和(8)为非线性的,分析起来较困难,故需先对其利用泰勒公式展开进行线性化,并直接写成状态空间方程的形式。对非线性系统方程求解Jacobian矩阵,在平衡点处进行展开,则系统可以用状态空间形式表示为
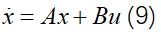
其中,
3.LQR控制器
LQR技术经常用于设计反馈控制器,为动态系统提供最优控制,可以使原系统达到较好的性能指标,也可以对不稳定的系统进行整定,而且方法简单便于实现。
LQR的性能函数为:

其中,Q和R表示分别表示状态和控制输入的幅度和持续时间的加权矩阵。系统的期望性能由Q和R矩阵定义。增加Q的一个值,意味着这个值作用的系统状态量,将以更快的速度衰减到0,加大R的值,会使得对应的控制量减小,控制器执行更少的动作,意味着系统的状态衰减将变慢。
4.仿真结果
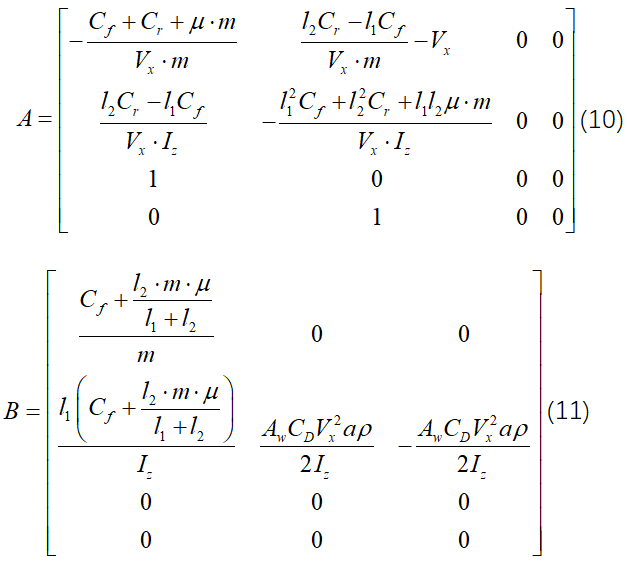
为了评估所提出的主动气动控制系统的有效性,比较了基于有无主动安全控制设计的数值模拟结果。为了全面评估设计在不同速度下的性能,模拟了前进速度为100、150和200 km/h时的避障动作。为了实现避障操作,采用了前轮转向输入,即振幅为0.03弧度的单一正弦波,如图3所示。
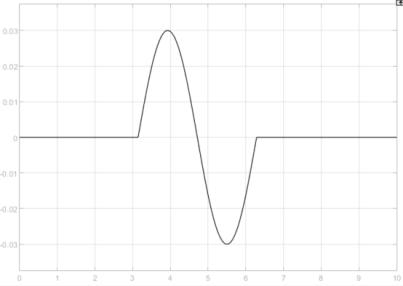
图3 前轮转角输入
在不同速度下,有无LQR控制的汽车横摆角速度仿真结果如下所示(图中蓝色为有LQR控制的结果,绿色为无LQR控制的结果):
图4 100km/h时车辆的横摆角速度
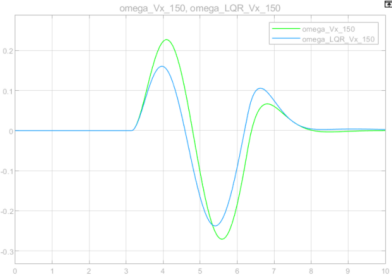
图5 150km/h时车辆的横摆角速度
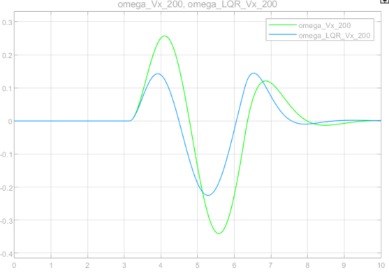
图6 200km/h时车辆的横摆角速度
5.结论
由仿真结果可知,与无主动气动控制的设计相比,LQR控制器显著抑制了横摆角速度。车辆前进速度越高,主动空气动力控制系统的效率越高。因此,在高速运动下,主动空气动力控制系统可以显著改善车辆在规避机动下的偏航稳定性。随着前进速度的增加,控制系统有望进一步提高车辆的横向稳定性。
附页
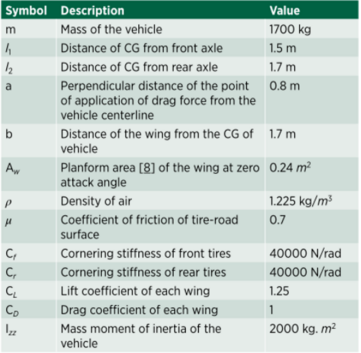
车辆系统参数如下:
参考文献:Hammad, M., Qureshi, K., and He, Y., “Safety and Lateral Dynamics Improvement of a Race Car Using Active Rear Wing Control,” SAE Technical Paper 2019-01-0643, 2019, doi:10.4271/2019-01-0643.
注:所用MATLAB版本为2018b,求解Jacobian矩阵的.m文件和simulink仿真模型已上传至Github,链接如下:
https://github.com/Dawn-break-wj/Lateral-Dynamics-Improvement-using-Active-Rear-Wing-Control.git
- 下一篇:中国汽研谈汽车数据出境安全怎么办?
- 上一篇:奇瑞油门踏板振动和蜂鸣声深度分析



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
