




 广告
广告





















































无人驾驶路径规划中的人工势场构建

路径规划是智能驾驶汽车的重要研究内容。路径规划分为全局路径规划和局部路径规划。全局路径规划在预先知道环境信息的前提下可以求解最优解,但是对计算能力的需求非常高且无法实时避障。局部路径规划根据车辆周围环境信息在满足各类约束条件的前提下实时规划无碰撞的车辆运动轨迹,对计算能力的要求较小,以用于车辆的实时运动控制。人工势场法是局部路径规划中一种比较常用的方法。
人工势场通常由一个碗状的引力场和一个山状的斥力场组成,引力引导车辆向引力场的最低点运动,斥力场迫使车辆远离斥力场的最高点。对于车辆安全来说,斥力场的建立尤为重要,良好的排斥场对障碍物的避让起着至关重要的作用。斥力场总是有一个影响区域,距离目标障碍物越近,斥力越大。此外,在影响区域之外,斥力会迅速减小到最小或为零。
1.人工势场架构
通常来说,自动驾驶车辆的安全和移动性可以由相邻的车辆和交通标志进行影响。这些障碍物的信息可以由机载传感器和V2V网络通讯进行获取。因此我们设计了一个人工势场方程去计算点 (m, n) 的人工势场。

其中,emn表示本车与障碍物车辆之间的势场;rmn表示本车与车道线之间的势场;smn表示影响车辆行驶方向的势场。
2.障碍物车辆势场
通过建立与障碍物车辆之间的势场可以保证与障碍物车辆的安全距离。由于车辆的动力学特性和道路的几何特性,障碍物车辆周围的危险等级不是均匀分布的。比如障碍物车辆的横向危险程度主要取决于两车之间的相对距离,但是纵向距离不但取决于相对距离还取决于相对速度。建模过程中,以车辆的质心为坐标系原点,车辆的纵向运动方向为x轴,横向运动方向为y轴,如图1所示。
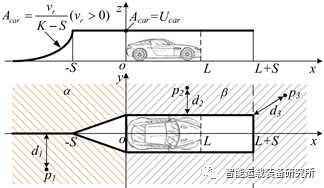
图1 障碍物势场建模示意图
障碍物车辆势场计算如下:
其中,Acar表示势场的影响系数,D表示两车之间的欧式距离;σv表示障碍物车辆影响的收敛系数。
其中Ucar表示一个障碍物势场的一个最大值,意味着在此区域内非常危险;vr表示两车的相对速度,当两车的行驶方向相同且主车比障碍物车辆的速度快时,vr>0,否则vr<0;K表示两车的相对距离;S表示两车的安全距离。
3.车道线势场
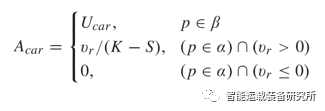
自动驾驶车辆的行驶应该受到车道线的限制。车道线可以分为两种:
(1)禁止穿行车道线,如图2中的l1和l4。
(2)可穿行车道线,如图2中的l2和l4。
显然这两种车道线的势场是不同的,禁止穿行的车道线附近应该设置非常大的势场值,避免车辆穿行;可穿行的车道线附近的势场值应相对于禁止穿行车道线小,但应保证车辆尽量行驶在道路中间。
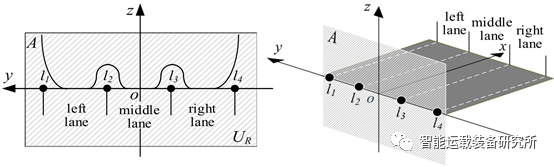
图2 车道线势场建模示意图
各车道线势场计算如下:
其中,k(i)(i=1,2,3,4)表示各条车道的增益,k(i)的取值与车辆的位置有关,例如当车辆位于左侧的车道时,k(1)=k(2)=1,例如当车辆位于中间车道的时候,k(2)=k(3)=1。Ulane是车道线势场的系数;σr是车道线的收敛系数;dlane代表车辆到车道线的横向距离。从上述公式中可以看出:车道线l1和l4的势值与到车道线的距离成平方关系,车道线l2和l3的势值与到车道线的距离成指数关系。意味着车辆会远离边界车道线并尽可能行驶在车道的中间。
车道线的总的势值是所有车道线势值的和,计算如下:
4.驾驶方向势场
当前方出现障碍物时,由于距离障碍物越远则势场值越小,所以车辆很有可能会出现掉头的情况,为了避免这种情况,使得车辆换道避让障碍物,引进车辆行驶方向势场,使车辆只能向前行驶。换句话说,U型掉头是不允许的。计算如下:
其中,xr表示主车距离势场中某点的纵向距离;ξ表示一个负常数;τ是一个正常数;从公式中可以看出车辆的前方的势场要小于后方的势场,这使得车辆被迫向前行驶。
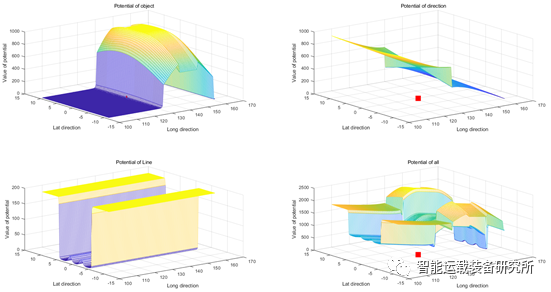
仿真结果如下:
参考文献:
[1] Huang, Zichao, Chu, et al. PathPlanning and Cooperative Control for Automated Vehicle Platoon Using HybridAutomata [J]. IEEE Transactions on Intelligent Transportation Systems, 2019.



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
