




 广告
广告





















































自动代客泊车:利用仿真和测试,开发安全可靠的系统和算法

文末附下载方式
摘要
本白皮书讨论了自动代客泊车 (AVP) 系统的发展,以及制定详尽的测试场景并在所有可能的条件下验证 AVP 系统所面临的挑战。本文还强调了开发自动代客泊车功能的若干关键需求。
简介
乘用车的自动代客泊车系统将成为首批进入市场的“无人驾驶” 车辆应用之一。这些系统的推广将有助于减少交通拥堵,优化现有停车位的使用情况,提高燃油经济性,助力驾驶员轻松驾驶。AVP 系统的发展需要管理安全性并确保提供可靠的解决方案,以应对复杂的交通状况并综合考虑由于狭窄的停车位、障碍物、车辆动力学、天气和其他干扰造成的各种情况。本白皮书基于 OEM 和一级供应商资助的研究和项目经验,重点介绍开发自动代客泊车功能的一些关键要求:• 一个精准的虚拟框架,用于测试和验证系统和算法,并确定需进行进一步物理验证的一组简化关键场景• 集成在可用的实体系统和车辆框架中• 持续满足功能、性能和安全需求。
需求和测试场景
我们需要定义一套完整的测试场景来验证 AVP 系统。这些场景在很大程度上取决于环境(停车场、仓库、车辆产线终端等),这些环境将作为用例来推动系统的需求。测试场景包括正常情况和故障情况(例如传感器故障或传感器信号的噪声)。初始场景直接来源于需求和预期场景,系统必须在其中成功运行。
每种场景都应考虑大量的条件和参数。例如,执行停车操作时,应考虑:1) 本车辆的开始和结束位置增量;2) 车辆方向(例如,与道路方向平行或成不同角度,向着停车位的左侧或右侧);3) 引入其他行为者(例如行人和车辆)。每个场景还需要定义车辆在不同子场景下的反应(例如,在行人过马路时停下来等待)。ISO 26262 标准涵盖了车辆电气和/ 或电子系统的功能安全性,并支持安全相关条件的定义。然而,它无法像 AVP那样完全解决更高级别的自动驾驶问题。AVP 系统可能会在非故障条件下造成危险情况,对其他行为者造成伤害。要解决这一缺陷,可以应用 ISO/PAS 21448(预期功能的安全性 (SOTIF) 分析), 以确保不存在 ISO 262626 第 3部分所列危险分析和风险评估 (HARA) 未识别出的“技术安全需求缺失”。系统- 理论流程分析 (STPA) 则针对可能导致识别潜在危险(“已知不安全” 情况)的外部事件和内部流程控制操作。STPA 方法以结构化的方式获取安全需求并确定测试用例。这种方法丰富了初始安全需求和测试用例集,而这可能是使用传统危险分析技术无法实现的。AVP 验证和确认的场景可以通过不同的来源来确定,包括现有标准、公共文献、真实驾驶数据、事故数据库等。测试用例的生成流程是迭代、递归的:在整个系统开发流程中都需要修改测试场景。借助虚拟框架,我们可以基于众多参数组合对这些用例进行测试,从而识别控制战略失败的给定场景中最关键的组合或实例。这种基于数值优化(使用 HEEDS ™ 设计探索和优化)的方法是由西门子工程团队开发的,可以对控制战略进行微调,重点关注最相关的实例。

STPA 针对可能导致识别潜在危险的外部事件和内部流程控制操作。此方法以结构化的方式获取安全需求并确定测试用例
虚拟框架
虚拟框架有助于在大量测试条件下验证系统性能。借助这一框架,用户能够:
• 根据机器学习算法评估一组传感器(类型、数量、位置)以准确识别驾驶场景
• 在实际驾驶条件下检查系统的行为
• 测试并验证控制战略和算法
• 识别关键场景的可管理子集,以进行系统的物理验证和确认
虚拟框架有助于在大量测试条件下验证系统性能
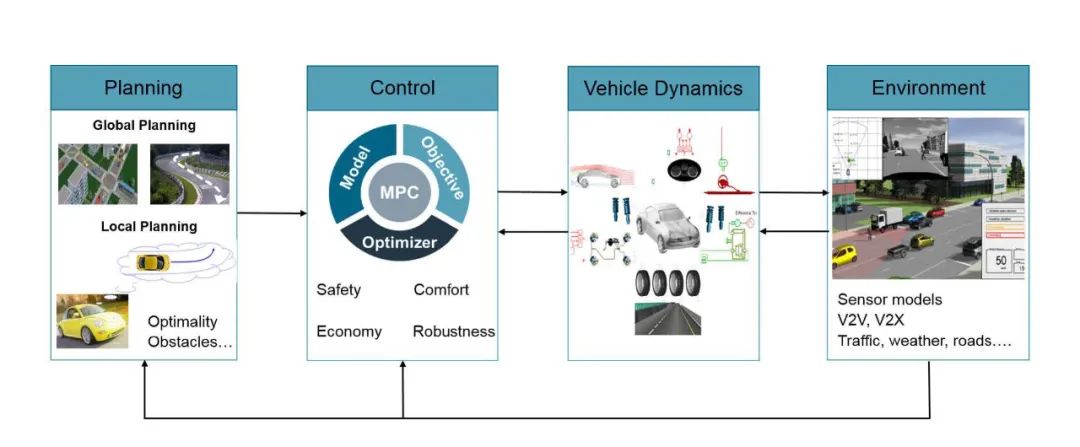
西门子 Simcenter ™ 工程和咨询服务已将此框架应用于先进驾驶辅助系统 (ADAS) 和自动驾驶汽车开发的先前和当前项目中。需要拥有足够保真度的模型以确保车辆、AVP 系统和环境的真实表现。还应考虑车辆动力学,因为它会影响系统的性能。其中可能包含多种保真度。在 Simcenter ™Amesim ™ 软件中,车辆离散分布,自由度有限(例如自由度为 15 )。这是一种高效计算的方法,需要了解底盘的物理参数。如果不适用于这一情况,则开发一种逆向工程方法,根据在车辆上进行的一系列测试来识别这些参数。轮胎也是一个关键部件,在低速停车时尤其重要。Simcenter Tire MF-Swift 模型提供了可以与 Amesim 车辆模型结合使用的解决方案。Simcenter ™ Prescan360 是用来代表静态和动态场景的解决方案,允许使用不同保真度的传感器模型,并定义和管理大量场景和条件。该框架与控制算法接口相连,并允许在虚拟环境中模拟真实的测试用例。Simcenter Engineering 已为各种 ADAS 和自动功能开发了感知、路径规划和控制算法。对于 AVP 而言,诸如 Hybrid A* 这样的图形搜索方法在大多数情况下都能成功找到合适的路径。结合基于优化的方法,上述图形搜索算法可以推广到多部车辆同时进行的分布式运动规划中。关键情况下的碰撞避让问题可以采用模型预测控制(MPC) 或其他基于模型的控制算法来解决,也可以结合基于人工智能的数据驱动方法,向经验丰富的驾驶员学习,提高控制精度。最后,“学习控制” 已被应用于重复场景的情况,如家庭或公寓停车。事实证明,它可以迭代提高控制性能(跟踪、时间、燃油经济性和其他性能因素),同时确保满足安全需求。
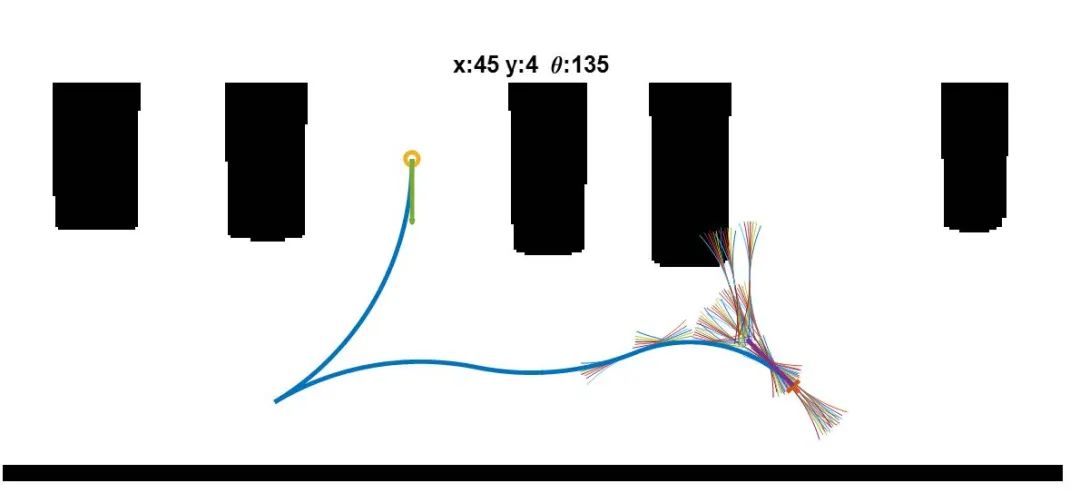
用于停车的混合 A* 路径规划算法示例
混合现实测试
APV 系统的开发人员必须验证系统可以处理运行时面临的极度复杂的环境和条件。其中包括大量无法在现实世界中全部测试的测试条件,例如各种行为者、车辆和行人。使用上述框架的虚拟测试有助于管理大量场景下的系统验证。可以在群集或云中完成这一大规模测试。为了缩小虚拟测试和现实测试之间的差距,该框架进行了扩展,可以在所谓的混合现实环境中进行测试和仿真组合,从而在实体系统可用时立即进行集成。在欧盟资助的ENABLE-S3 项目中,西门子和电装公司合作进行了一项混合现实实验,以演示这一方法。在此实验中,一辆真实的汽车在空停车场中行驶。虚拟框架中则引入了虚拟行为者(静态和动态车辆)。车辆传感器检测到虚拟行为者,就好像它们真实存在一样。这为设置各种测试场景提供了更大的灵活性,同时在实体车辆上“安装” 真实系统。西门子已经进行了其他类型的混合现实实验。认证机构也计划在车辆认证流程中加入混合现实测试。
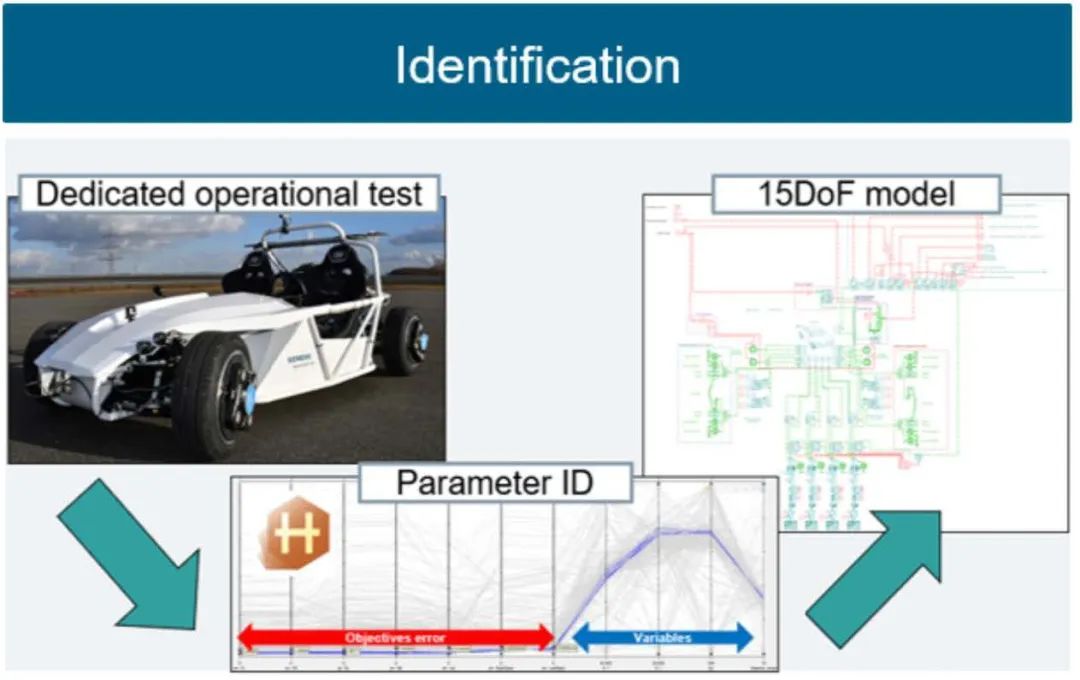
基于运行试验的车辆动力学模型逆向工程流程
结论
本白皮书讨论了 AVP 系统的发展,以及制定详尽的测试场景并在所有可能的条件下验证 AVP 系统所面临的挑战。同时讨论了场景定义的流程,以确保覆盖范围最大化。随后提出了一个虚拟框架,根据系统开发流程的多种情况,通过仿真来验证系统。最后,本白皮书探讨了将现实和虚拟测试集成到混合现实框架中的问题。借助这一功能,开发人员可以管理针对如此多情况的物理验证的需求,并将最终验证限制在数量较少的若干关键情况中。

包含实体车辆和虚拟静态/ 动态行为者 (*) 的混合现实实验
参考信息• “Mixed reality testing of multi-vehicle coordination in an automated valet parking environment” Accepted to the 21st IFAC – (International Federation of Automatic Control) World Congress in Berlin, Germany, July 12-17, 2020
• Son, T.D., Bhave A., and Van der Auweraer H., “Autonomous driving control in safety critical scenarios ”, JSAE 2019, Yokohama, Japan
• Son, T.D., Van der Auweraer H., and Van Herbruggen J., “Autonomous Valet Parking Planning and Control Developments”, JSAE 2018, Yokohama, Japan
• Son, T.D., Bhave A., Geluk T., and Van der Auweraer H., “Simulation-based testing framework for autonomous driving development”, IEEE 2019 International Conference on Mechatronics, Ilmenau, Mar. 2019
• Son, T.D., Awatsu L., Hubrechts J., Bhave A., and Van der Auweraer H., “A simulation-based verification and testing framework for ADAS development”, Transport Research Arena, Vienna, 2018
• Son, T.D., Quan N., “Safety-critical control for non-affine nonlinear systems with application on autonomous vehicle”, 58th IEEE Conference on Decision and Control, Nice, Dec. 2019
• A reference to Enable S3: https://www.enable-s3.eu/
识别二维码原文下载:




编辑推荐


最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
