




 广告
广告





















































智能汽车车用基础软件平台关联技术

除此以外,ISO26262 标准还定义一些支持性流程(如:变更管理、配置管理等),来辅助功能安全开发活动的合理有序执行。标准还包含了功能安全审核的流程定义,来对功能安全开发的产物进行验收, 并确认产品是否满足量产的要求。
2. ISO21448 汽车预期功能安全标准
ISO21448 作为ISO26262 的补充,它填补了ISO26262 中关于自动驾驶领域的功能安全分析的空缺。SOTIF(Safety Of The Intended Functionality )的诞生也是 ADAS 与自动驾驶普及大背景下的必然结果,它是预防不合理风险的一道防线。
ISO21448 预期功能安全标准重点关注的是 “预期的功能” 的安全性,即满足预期设计要求的功能所具有的安全水平,将设计不足、性能局限导致的风险控制在合理可接受的范围内。由于自动驾驶车辆运行场景条件的复杂性和未知性,自动驾驶功能即使满足设计要求,仍可能存在大量的安全运行风险。如何避免预期的功能所引发的安全风险,即为预期功能安全。
从安全性和已知性角度,将车辆运行场景分为已知安全场景、已知不安全场景、未知不安全场景和未知安全场景 4 个区域,如图 4.1-2 所示。在开发之初,区域 2 和区域 3 的比例较高,SOTIF 技术通过对
已知场景及用例的评估,发现系统设计不足,将区域 2 转化为区域 1,并证明区域 2 的残余风险足够低;针对区域 3,SOTIF 技术基于真实场景及用例测试、随机输入测试等,发现系统设计不足,将区域 3 转化为区域 2,同时基于统计数据和测试结果,间接证明区域 3 的风险控制到合理可接受的水平。由此 , 实现对已知和未知风险的合理控制,完成自动驾驶车辆系统的安全提升和发布。
图4.1-2 自动驾驶运行场景分类及SOTIF开发、验证和发布演进
自动驾驶系统安全风险的一个主要来源是未知不安全场景区域,对其无法定义需求,也难以量化评价, 这成为全球自动驾驶安全开发领域的痛点,ISO21448 标准在此背景下诞生并于 2022 年 6 月发布,为此痛点提供方法支持。
ISO21448 标准给出了 SOTIF 开发流程,如图 4.1-3 所示,其中圆圈的序号代表标准原文各章节号:
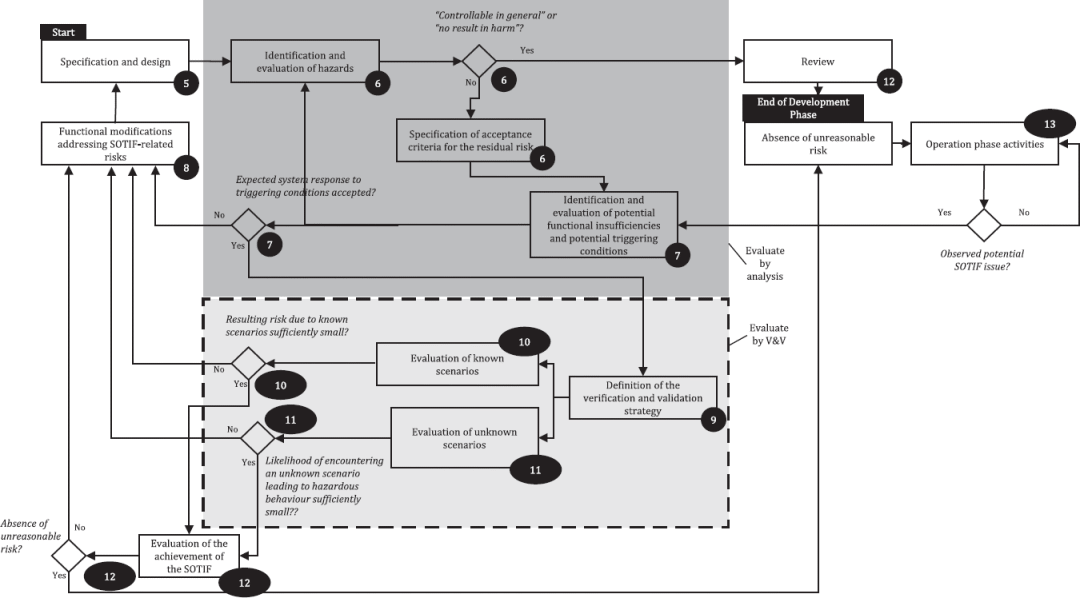
图4.1-3 SOTIF活动流程示意图
4.1.2 功能安全软件架构
1. E-GAS 安全架构思想
汽车功能安全旨在把电子电气系统失效而导致的人身危害风险控制在合理范围内。下图 4.1-4 是常见的电子电气系统硬件构成图,一个电子电气系统的构成要素,除了图中可见的硬件外,也包含图中不可见的软件。
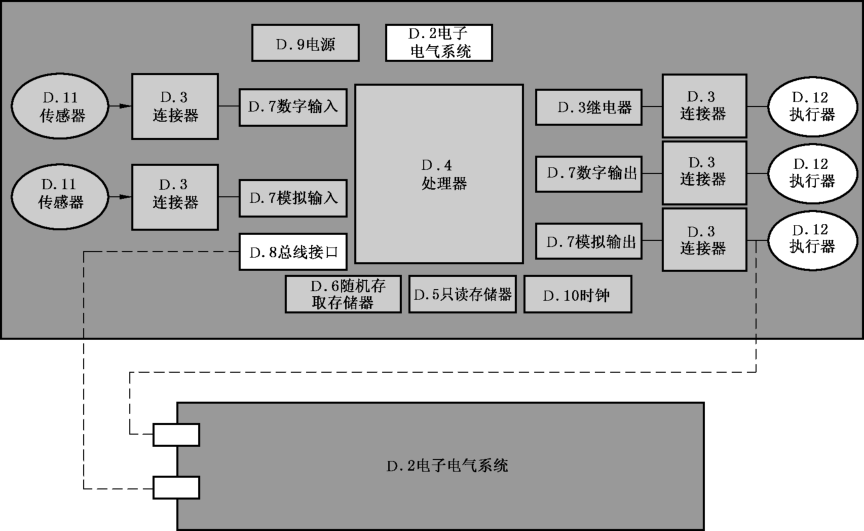
图4.1-4 常用电子电气硬件系统
电子电气系统的失效,既包含由于软硬件设计错误引起的系统性失效,也包含由随机硬件故障引起的失效。根据系统架构,需要设计各种安全机制去预防和探测功能故障,并能够在故障发生时,避免或者降低危害的发生。这就需要一个强壮的功能安全软件架构来管理和控制这些安全机制,降低功能安全整体开发难度。
目前,E-GAS(Standardized E-Gas Monitoring Concept for Gasoline and Diesel Engine Con- trol Units)无疑是当前使用最为广泛的一个安全软件架构方案。虽然 E-GAS 最初只是针对汽 / 柴油发动机管理系统而提出的安全架构方案,但是经过简单的适配,也可以用于车身系统,变速箱系统以及新能源的三电系统等,具有非常良好的扩展性,应用非常广泛。
下图 4.1-5 是 E-GAS 的三层软件架构设计方案,从上到下,软件分为 Level1~3 总共三层,Level1 是功能实现层(function level),Level2 是功能监控层(function monitoring level),Level3 是控制器监控层(controller monitoring level)。该架构形成了很好的分层监视框架,并有效实现了功能安全分解, 通常采用 QM(ASIL X)+ ASIL X(ASIL X)的安全分解策略,即将功能实现软件(Level1)按照 QM 等级开发,功能冗余软件或安全措施(Level2、Level3)按照最高的要求等级 ASIL X(ASIL X)进行开发, 这样可以有效降低功能软件的安全开发成本。
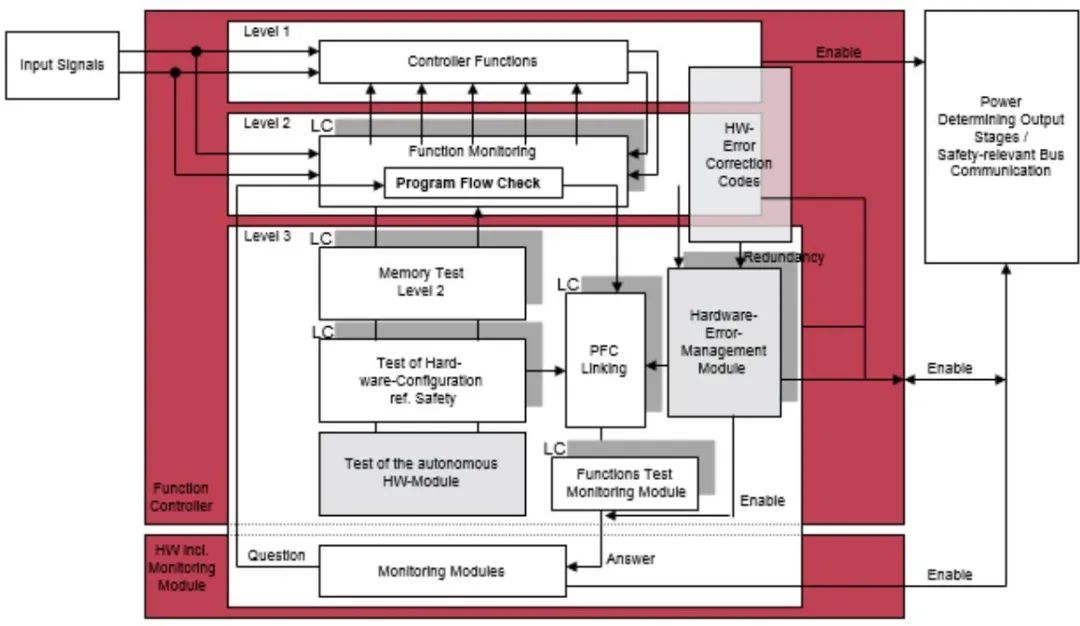
图4.1-5 E-GAS三层监视架构方案
(1) Level1 功能实现层
Level1 是功能实现层,完成具体的功能实现,比如对于电机控制器来说,这一层实现了将请求的扭矩转换为电机的扭矩输出。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
