




 广告
广告





















































100Tb/秒—让自动驾驶汽车更快、更远、更清晰地“洞悉”一切


配有AtomicSense的8级卡车。(NPS)
NPS的先进信息理论让自动驾驶汽车更快、更远、更清晰地“洞悉”一切。每年世界上有130多万人死于道路事故,5000万人受伤。尽管道路安全状况随着时间的推移有所改善,但在减少伤亡率方面,各国都面临着艰巨挑战。为了加快这一进展,零伤亡愿景(Vision Zero)和美国国家道路安全战略(National Roadway Safety Strategy)提出了目标,不仅要改善安全状况,更要实现道路事故零死亡。本文回答了以下三个问题:
-
汽车要有多好的“视力”, 才能杜绝可预防道路死亡事故的发生?
-
拥有这种视力需要哪些条件?
-
如何满足这些条件?
为了在最坏的条件下也能杜绝可预防的道路死亡事故,我们认为车辆感知信息(从环境中进行取样)并进行处理的能力必须比人类快十亿倍。我们还认为,先进的传感器系统能够做到这个速度,而且这个系统可以在未来两年内实现商业化。 汽车的“视力”必须好到什么程度?当汽车能够安全停车或转向躲避危险的情况下,往往能避免事故 。而一辆汽车突然冲向迎面而来的车流,或是一块巨石突然落在汽车前面,这种情况,事故通常无法避免。 但是,只要遵守交通法规的汽车能够在必要时安全停车或转向,就可以杜绝可预防事故的发生。
提升道路安全的一个重要假设是:在所有道路条件下,看得更快、更清、更远都能够加速实现道路事故零死亡。看得更快可以减少感测时间,因此可以更早开始感知;看得更清楚可以提高感知的可靠性,使汽车得以更早刹车或转向;而看得更远意味着可以更早地开始感测。为了杜绝可预防的道路死亡事故,车辆必须感知到人类无法感知的东西。雷达、激光雷达、处理器和分析技术的进步让车辆能够比人类更好地感知前方和周围环境。这有助于在最恶劣的驾驶条件下杜绝可预防事故的发生,并在不太恶劣的条件下实现更平稳的制动。最糟糕的情况包括:
-
雨、雪、冰雹、大雾天气和黑暗环境
-
特定道路的最高车速规定
-
阻碍视线的弯道、斜坡、建筑物和峡谷
-
与负载相关的制动条件下限,以及与温度、压力和表面摩擦相关的轮胎条件。
我们使用信息理论和物理学的原理,来确保有足够的精度(保真度)和频率(帧数/秒)重建最糟糕场景所需的数据速率(位/秒),以避免发生可预防的事故。

图1:8级卡车在夜间雪地行驶。(NPS)为了说明这一点,请想象在夜间降雪天气,一辆重型卡车在公路上行驶时所面临的场景(图1)。重建这个场景需要以足够的精度将卡车周围的短距离空间和前方的长距离空间分割成被称为“体素”的立方体状的小“积木”。引入的体素越小,数量越多,可实现的精度就越高。为了在最恶劣的条件下实现安全停车或转向,卡车公司的驾驶员和卡车自动驾驶的开发者认为他们需要看到卡车方圆约250米(820英尺)和前方约1000米(3281英尺)的范围,以及约30度的长距离视场角(FoV)。根据这些要求,传感器需要探测到约30亿个体素以重建图1的场景。1000米远的体素体积约为2*2*2英尺(0.6*0.6*0.6米),比100米(328英尺)远的体素体积多出几个数量级的采样量。高精度采样是确保可预防道路事故零死亡的重要条件,这意味着必须以极快的速度对超详细场景进行更新。将代表物理测量数据的连续模拟信号转换为通过时间间隔的0和1组成的数字信息流,就可以得到场景数据。当雷达和激光雷达传感器查询体素中的原始数据时,它们需要可靠地检测目标并避免误报。由于环境嘈杂,传感器必须多次探测体素以达到90%以上的可靠度和低于百万分之一的错误警报率。为了杜绝可预防事故的发生,在1000米远的最弱信噪比下(最差条件)也要达到这一性能。基于关键变量的代表值和敏感性分析,我们的计算表明在最坏的条件下,实现可预防道路事故零死亡所需的数据速率接近惊人的7×1015 比特/秒(7Pb/秒)!从这个角度计算,人眼输送到大脑的感知数据速率约为10×106 比特/秒,约为预防事故所需信息处理速率的十亿分之一。因此,人类没有足够快的感知和信息处理能力来杜绝可预防的道路死亡事故。在可预防道路事故零死亡上面,摄像头的感知能力同人类一样不够强大。摄像头和我们的眼睛类似,当环境光线充足时,它运转良好并且不需要看穿目标物或周围的角落。但是,为了实现道路零死亡,我们需要在最坏的光照条件下快速检测出隐藏的目标物。然而,无论摄像头采样速度有多快,在最坏的条件下,都是无法找到这些目标物的。 利用原子范数任何一个物理扫描整个覆盖范围的传感器系统所需的数据速率都高到让人难以置信,不过只有这样才能更快、更远、更清晰地重建场景,才能在最坏的条件下杜绝可预防的道路死亡事件。只是目前,没有任何一个系统能够接近做到这一点。
幸运的是,在与先进传感器和系统芯片(SoC)相结合时,有一种数学框架可以满足场景重建的海量数据速率要求,并让手动驾驶和自动驾驶车辆都有足够的感知能力以杜绝可预防的道路死亡事件。这种以压缩感知(CS)为基础的技术被称为原子范数(AN),能够减少维持一定性能水平所需的测量次数,目前已被开发用于改善磁共振成像(MRI)质量。AN使用更宽的光束和更好的计算方法,以允许单独查询每个体素。它还基于一个事实,即超过99%的体素只是空旷空间。这种方案将数据速率降低到没有AN技术时的速率的百分之一到十分之一,同时还能持续监测整个空间。基于敏感性分析,我们认为使用AN技术时手动和自动驾驶车辆必须能够以约100 x 1012比特/秒(100Tb/秒)的峰值速率对环境进行感知,以处理在最糟糕条件下传感器数据的激增。这比不使用AN时7Pb/秒的速率降低至少98%。除了能够降低所需的数据速率,AN技术仅需五十分之一的发射功率就能够获得与传统雷达算法相同的性能,提供更高的分辨率并检测到更多目标物。传统的汽车雷达几乎不能探测到100米外的行人,但使用AN和多波段雷达可以在雨、雪、冰雹、大雾天气和黑暗环境中探测到超500米(1640英尺)外的行人。 请达到100Tb/秒的感知速度需要什么?
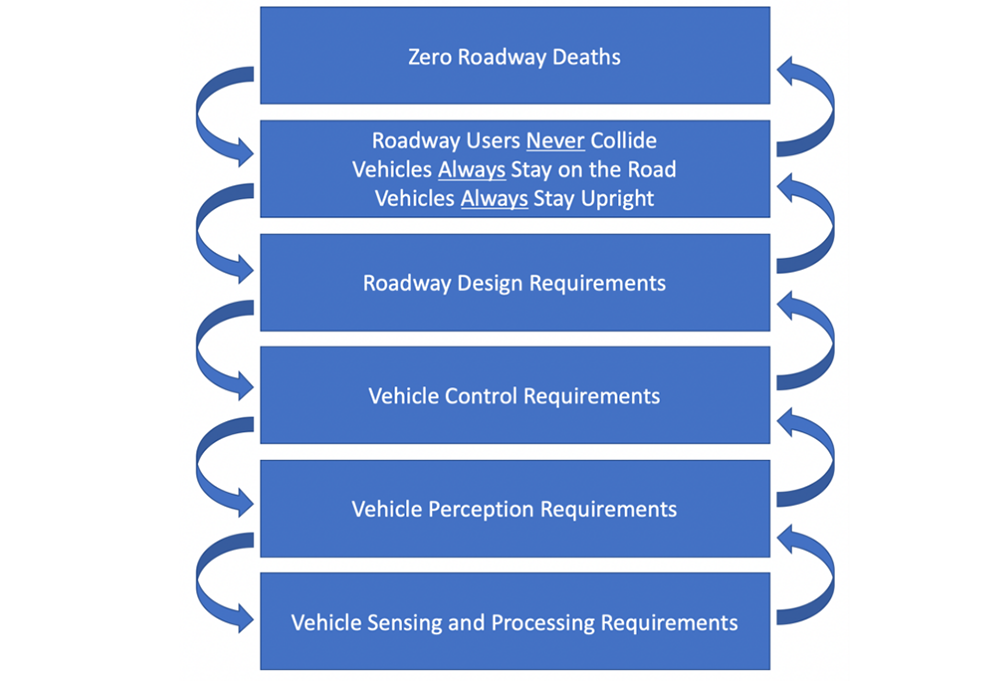
图2:“道路零死亡”的要求是如何向下传递。(NPS)
图2显示了“道路零死亡”的要求是如何向下传递并体现在具体的传感要求上,以及满足传感要求是如何向上传递以助力实现其他系统要求的。我们的前提是,需要始终100%识别环境中的情况,以实现可预防的零道路死亡,通过在最糟糕条件下以100Tb/秒左右的速度进行感知和处理,才能更容易地满足更高级别的系统要求。要做到这一点,原子范数必须与多波段雷达、固态激光雷达、SoC处理器和数字地图相结合。
通过不同的传播和反射特性,不同的雷达波段可以互相补充——高波段雷达能够提供更高的分辨率;低波段雷达拥有更广的探测范围(特别是在恶劣天气条件下),并且可以穿过目标物或在其周围发生弯曲。由于目标物在不同频段下的反射能力不同,人们可以利用不同的雷达反应来确定不同目标的组成材料(例如金属与柔软物品)。这意味着雷达必须运用因果和逻辑推断能力来识别环境中的多光谱反应。固态激光雷达具有高精度重复扫描的优势,且没有活动部件。激光雷达与雷达一起用于长距离视场角。 它依靠多个激光发射器和探测器对视场角的同一场景进行扫描,这能够提高信噪比、延长探测距离,同时增加光子路径多样性以提高可靠性。经过精心设计的激光脉冲序列可用于提高信号水平,并在单个体素内检测和定位多个目标。高度先进的边缘AI处理器对来自每个传感器模块的庞大数据流进行跟踪、分析和解析。SoC处理器是高端、低功耗的专用硅芯片,具有半柔性架构。它们是处理100Tb/秒的数据流所需的计算中枢,并且几十个这样的处理器要同时工作并完美配合。最后,数字地图帮助我们了解道路在哪里弯曲,坡度在哪里出现,并提供线索提醒我们关注最需要注意的体素。 此外,了解峰顶的位置可以让我们安全地调整车速,以减小无法观察山体走势带来的风险。 汽车能有100Tb/秒的感知速度吗?NPS对三种创新方案进行了结合:
-
新型固态长距离激光雷达,可让汽车探测到1000多米外骑自行车的人。
-
新型多波段雷达,可在雨、雪、雾等天气中探测到500米外的行人,且漏报率极低。
-
原子范数数学框架可实现近乎完美的探测和评估性能,且能以定制芯片或AI软件的形式实现商业化。
初步研究证实,新型传感器平台核心元件6的探测范围、角度分辨率和精度都接近理论性能极限。(查看测试结果请访问www.nps.ai)。根据这一概念证明我们可以得出结论:该技术具备100Tb/秒的感知速度,其“视力”足以实现可预防道路事故零死亡。
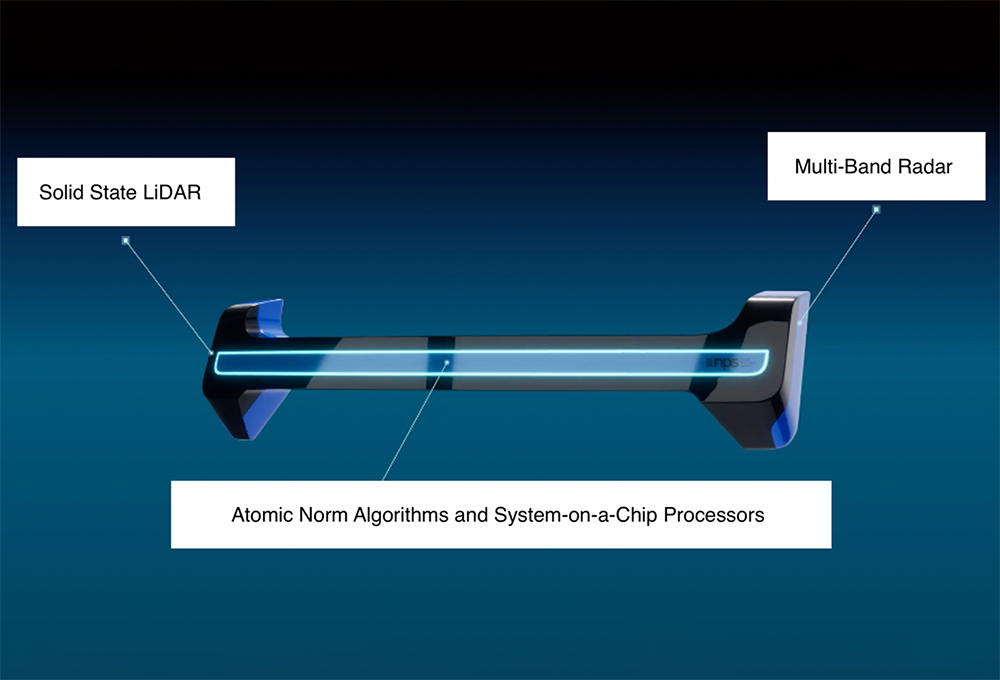
图3:F/1.8最大光圈的AtomicSense(NPS)
我们正在开发一款名为AtomicSense(NPS已将其注册为商标)的商业传感器系统平台,拥有100Tb/秒的感知速度。长途卡车运输将是第一个商业应用场景(图3),随后是自动驾驶出租车,然后是私家车。我们基于FGPA(可编程阵列逻辑)开发的传感器融合系统原型,安装在克莱斯勒大捷龙(Pacifica)车型上,目前正在加州的公路上进行路测,并将于2022年12月冬季开始部署在美国中西部公路上行驶的8级卡车上。
在2022和2023年,我们将继续提高原子范数技术的算法能力、部署定制芯片,在提高性能的同时降低功率、尺寸和成本。AtomicSense计划到2024年实现更快、更远、更清晰的观察所需的所有关键目标,以帮助可预防卡车事故零发生。AtomicSense能帮助那些开发高级驾驶辅助系统(ADAS)和全自动驾驶系统的公司加快实现道路事故零死亡。对于这些公司的关键问题是:“要实现道路事故零死亡,到底需要些什么?”我们认为,能够看到并处理大约100Tb/秒的数据量是必要要求之一。通过将突破性分析、先进的多波段雷达、固态激光雷达、传感器融合和SoC技术进行结合,这的确是有可能实现的。
- 下一篇:西门子在线研讨会|汽车嵌入式软件自主开发
- 上一篇:梅赛德斯奔驰的L3进阶之路



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
