




 广告
广告





















































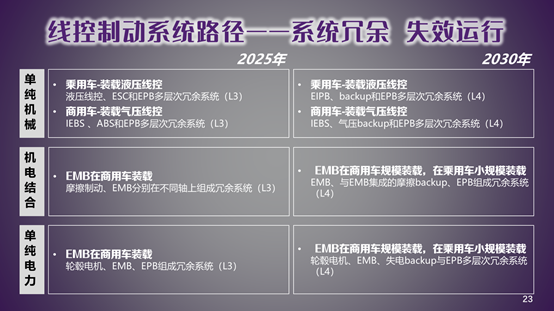
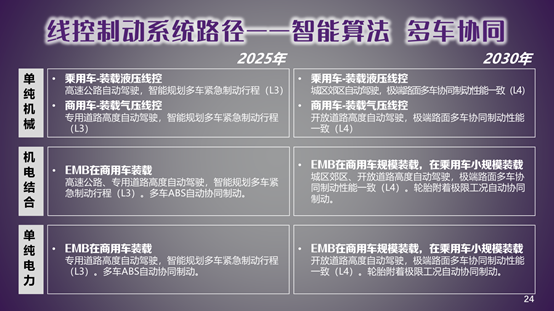
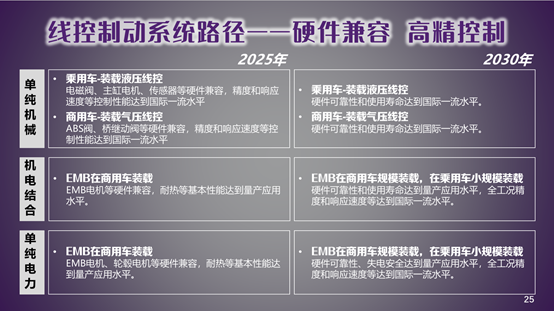
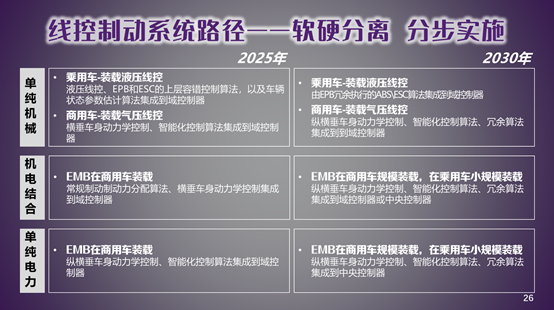
智能底盘技术路线图框架

算法方面,2025年面向L3使用场景实现多车紧急协同制动,2030年面向L4使用场景实现极端路面、轮胎附着极限工况等多车协同制动。
硬件方面,2025年关键部件兼容、性能国际一流,耐热达到量产水平;2030年可靠性和寿命达到国际一流水平。
软硬分离方面,2025年与电机控制相关、车载状态估计、传感等软件集成域控;2030年软件集成到域控或中央控制器。
(4)线控转向系统板块

路线图涉及的是方向盘与转向执行没有直接机械连接的系统。
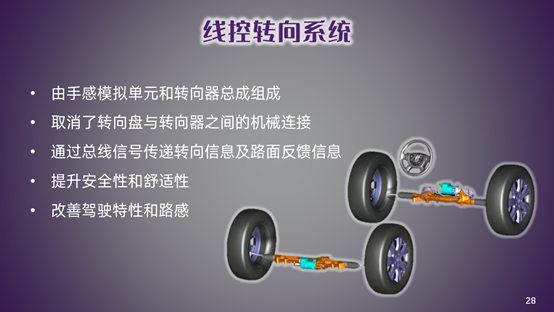
2025年目标:线控转向在高端车型实现批量应用,最高满足L3安全需求;具备关键零部件、控制策略的研发能力;关键部件产业链自主可控。
2030年目标:线控转向应用形成市场规模,最高满足L4安全需求;具备全部零部件、控制策略、故障诊断的研发能力;全产业链自主可控。
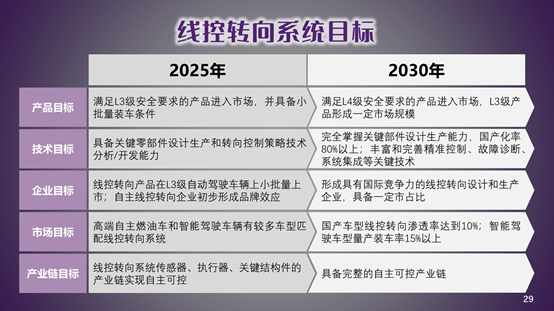
路径是,应对L3自动驾驶需求,采用六相电机、驱动电路冗余;应对L4自动驾驶需求,采用六相电机、双ECU冗余;应对L5自动驾驶需求,双电机及控制系统冗余。

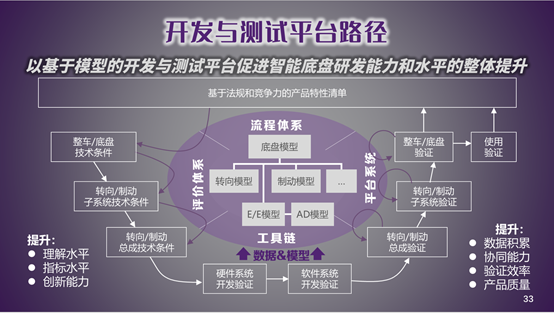
(5)开发与测试平台板块
2025年目标:完成数字化智能底盘1.0模型,支撑性能验证、功能安全验证;形成系统开发与测试平台架构;能够支撑多个代表性整车企业典型车型的开发;平台关键技术自主可控。
2030年目标:完成数字化智能底盘2.0模型,支撑部件到整车研发全链条,实现商业化;开发与测试技术能力达到国际先进水平;平台实现大面积推广,形成产业。
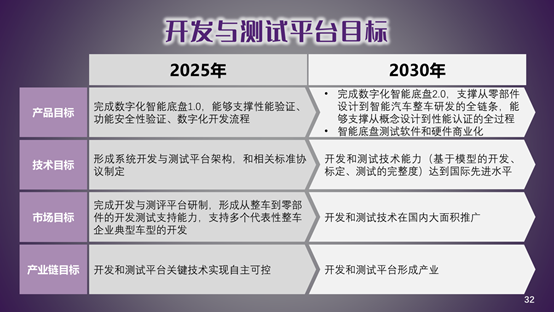
开发测试平台的路径是,采用基于模型的路径,从流程体系、评价体系、工具链、平台系统四方面,促进智能底盘研发能力和水平的整体提升,包括提升开发过程理解水平、指标水平和创新能力,提升测试过程数据积累、协同能力、验证效率和产品质量。
(6)标准规范板块
- 下一篇:《汽车软件全景图(2022年)》 | 附下载
- 上一篇:浅谈车载以太网一致性测试



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
