




 广告
广告





















































应用SomatXR采集仪进行CAN总线数据采集

关键字:CAN;CANFD;SomatXR CAN FD测量模块
快速获取车辆或传感器的CAN通讯数据,是载荷谱测试分析的一项常规内容。CAN-BUS由ISO标准化后发布了两个标准,分别是ISO11898-2(125kbps至1Mbps的高速通信标准)和 ISO11898-3(小于125kbps的低速通信标准),CAN FD协议是CAN-BUS 协议的升级,波特率由原来1Mbps提升至8Mbps以上,极大提高通讯效率,因而广泛应用于新能源和智能化行业。
SomatXR 数据采集系统的MX471C-R(坚固型CAN FD测量模块)适用于CAN-BUS测量场景,下面介绍应用SomatXR采集车辆CAN-BUS总线信号。
MX471C-R具备4个CAN FD硬件测量端口通道,并向下兼容CAN2.0A/B。

图1 MX471C-R测量模块外观
总线传输用到CANH与CANL、CAN地三个引脚,硬件连接时需使用线缆专用线缆1-KAB-2109的白色(CAN H)、蓝色(CAN L)和黑色(CAN Ground)三个引脚即可。
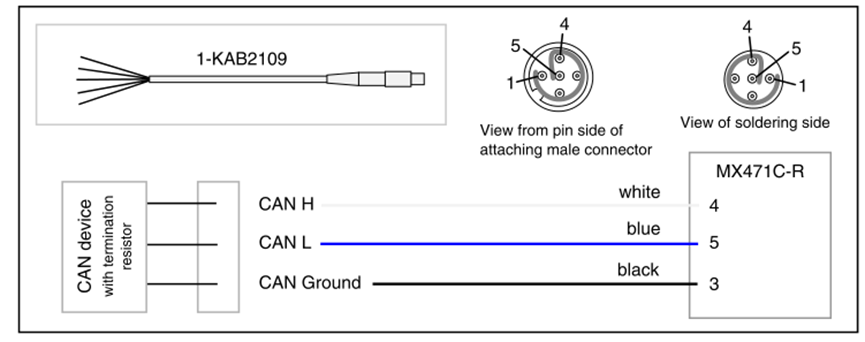
图2 KAB2109接线定义
安全可靠的 catman 控制软件与数据采集系统SomatXR测量系统完美匹配,操作步骤如下。
(1)开放CAN-BUS硬件端口
打开catman软件“Options —— hardware —— CAN bus options”,进入如下图3硬件配置界面。
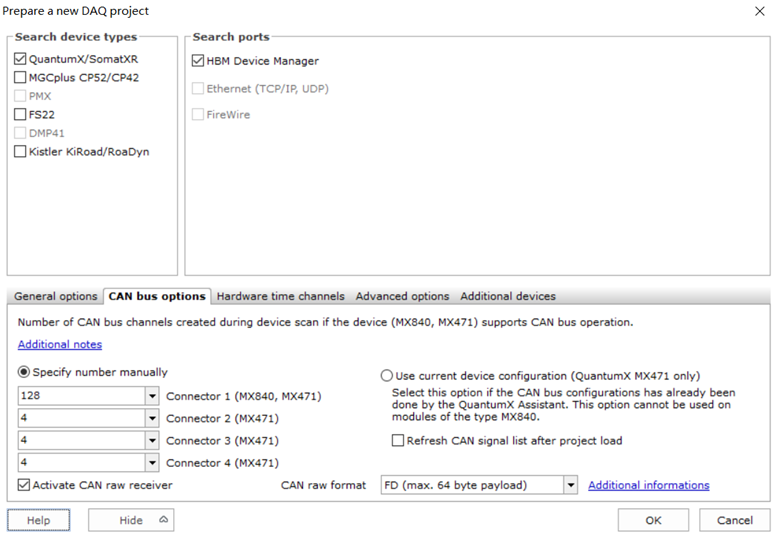
图3 配置CAN bus选项
根据测试需要,给每个端口选择合适的通道数容量,单通道容量高达128,如图4。
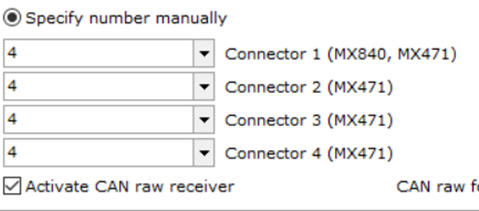
图4 配置端口通道容量
建议勾选 激活接收原始报文。
(2)配置CAN端口信息
新建Project,进入DAQ channels界面,选中MX471C-R的任意一个通道,依次点击“Additional functions——CAN configuration”,进入CAN端口配置,如图5。
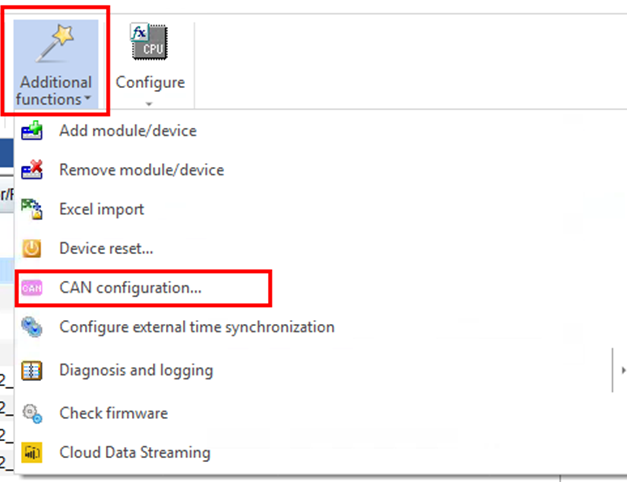
图5进入CAN端口配置
MX471-R测量模块的4个测量通道支持独立设置。端口配置界面如下图6,以下的配置信息需要和车辆的电器部门确认准确的参数。
•波特率:Bit rate;
•采样比:Sample point ratio;
•同步跳转带宽:Sync.jump width
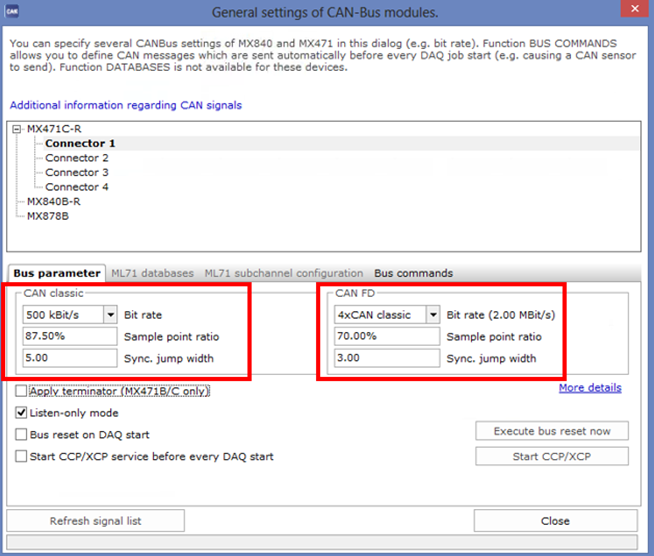
图6端口配置界面
在参数设置中,需区分CAN classic(对应仲裁帧)和CAN FD(对应数据帧)。对于测试普通 CAN,只需设置CAN classic即可,数据帧无效。对于测试CAN FD数据,需同时设置仲裁帧和数据帧。
ISO11898-2 规定:在高速 CAN 网络中,需要在网络终端节点处接入 120Ω 终端电阻,用于消除总线上的信号反射,避免信号失真。车辆CAN网络通常内置终端电阻硬件,此情况下可不启用测量模块的内置电阻。
启用监听模式,防止对车辆总线产生干扰。
(3)配置OBD-II端口信息(如果不是采集OBD-II数据,可以跳过2.3)
打开BUS commands, 如图7。
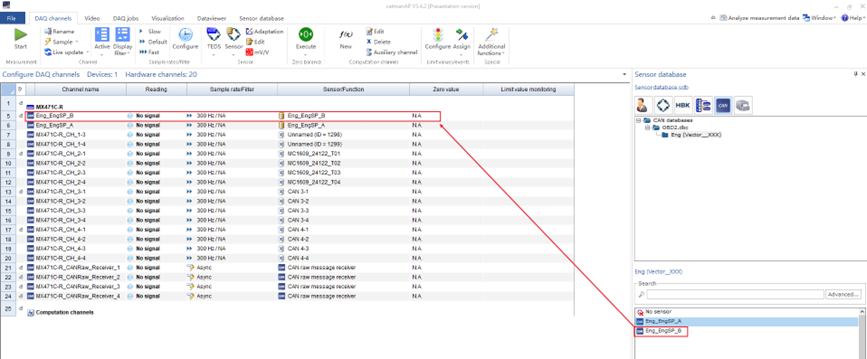
图7 OBD端口配置界面
输入CAN线请求命令和请求周期,catman内置了部分OBD-II的请求指令,可以直接选择使用即可。Catman内置指令如下图8。
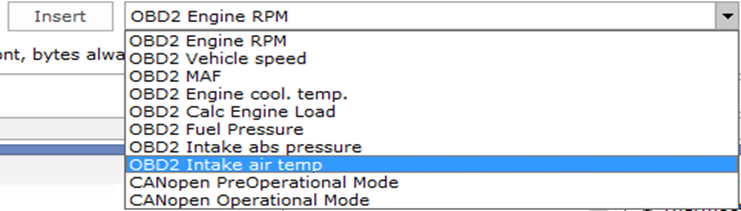
图8 Catman内置指令
(4)查看CAN原始报文
在如下图9,DAQ channels 界面,点击 Live update,激活实时更新功能。如CAN总线正常通讯,则在CANRAW-Receiver通道将呈现滚动报文数,且信号状态灯转变绿色。
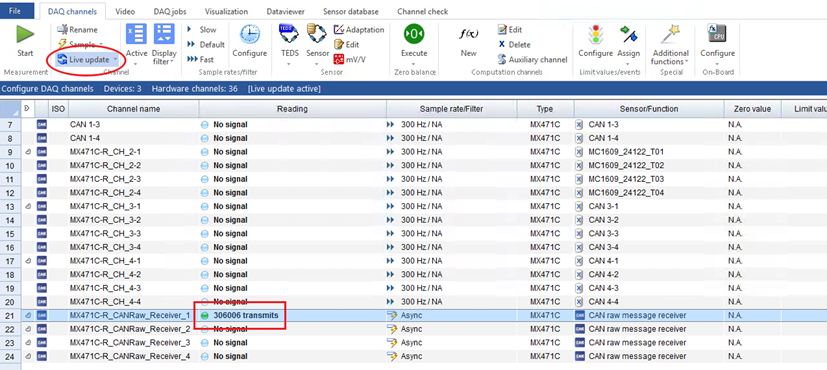
图9 显示CANRAW-Receiver通道
点击Visualization 进入显示窗口,将右侧的原始报文通道直接拖入空白区域,就完成报文显示窗口的创建,如下图10。
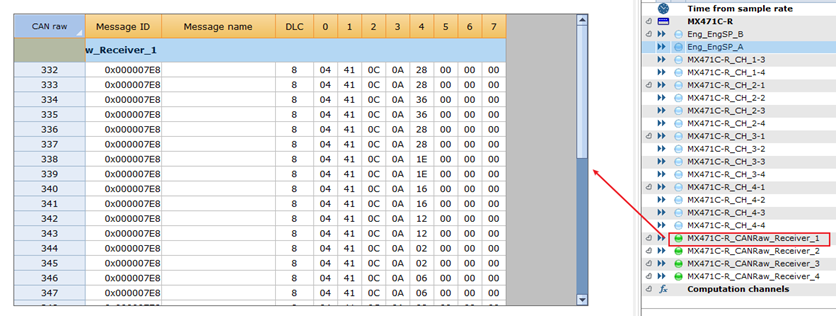
图10 创建报文显示窗口
启动软件 Start按钮,即可进行原始报文采集。
(5)导入dbc解析文件
打开sensor database页面,点击“file——import——Vector CAN database”,浏览选择对应的*.dbc文件,确定导入即可,如下图11。
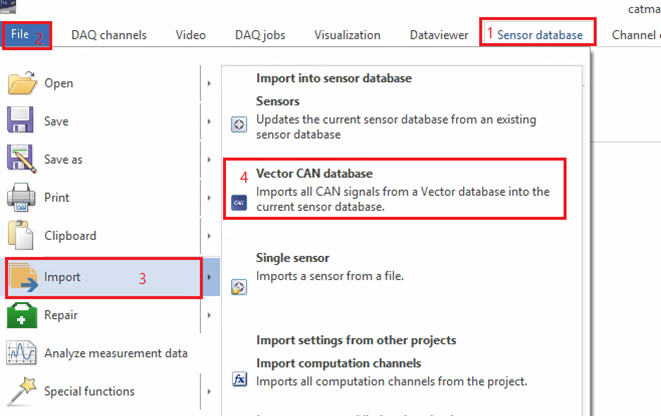
图11 导入dbc文件
(6)配置CAN通道
选择右侧dbc导入的通道,拖到左边MX471开放的CAN测量通道上,即完成CAN通道的配置,如下图12。
图12 配置CAN通道
至此,完成测量模块针对CAN通讯的参数配置,也可通过曲线、图表、数值等不同方式,实现如图13所示,在测试过程中对测量数据的实时预览。
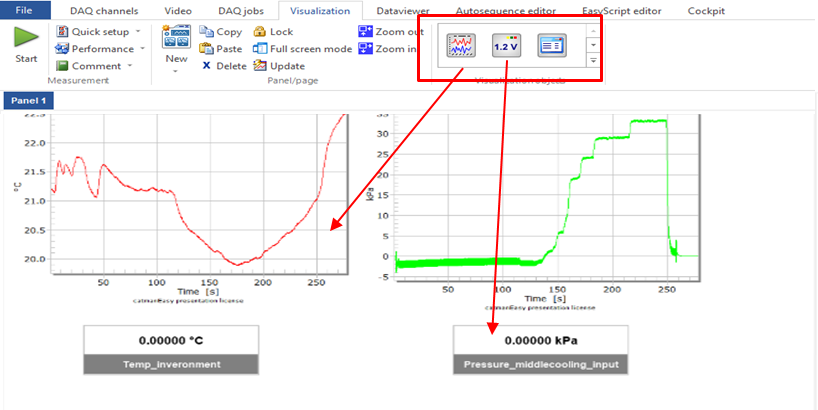
图13 实时数据预览
结语
本文介绍了应用SomatXR 数据采集仪MX471C-R测量模块进行CAN-BUS总线信号的测量过程。
测量过程操作简便,具备良好的人际交互界面,并且测量模块具备IP67防护等级、高抗冲击和振动的能力(振动与冲击符合MIL-STD202G要求)。因此,SomatXR MX471C-R被广泛应用于恶劣的条件下载荷谱测试工作。
作者简介:殷红雷,曾任于某整车企业试验中心结构耐久科室负责人,现就职于上海山外山机电工程科技有限公司,主责载荷谱采集分析处理、台架试验等工作。
参考文献
[1]SomatXR_MX471C-R_Datasheet。
[2]catman Operating Manual。







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
