




 广告
广告





















































交通毫米波雷达在高速公路场景应用中的一些问题讨论

近年来交通毫米波雷达在智慧高速类项目中逐渐广泛应用。新型毫米波雷达对典型轿车的探测距离可以扩展到500m以上,实时探测行驶车辆的位置、速度,准确识别停车、超速、缓行、拥堵等事件,具有全天时、全天候稳定工作的特点,弥补了高速公路管理部门在夜间或光线不足情况的全路段监控难题。然而,在实际的工程应用中,交通雷达依然面临着一些问题与挑战。
一、大型车辆遮挡、识别问题
场景展示
高速公路上行驶的集装箱卡车、挂车比例通常比其他道路高。大型车辆物理尺寸比较大,其巨大的规则的金属外形对交通雷达而言属于极强反射体,在雷达系统的设计过程中,如果典型轿车正面或者背面、入射角为0°的条件下,目标RCS按照10dBms仿真的话,大型车辆至少要按照35dBms进行系统灵敏度计算。大型车辆物理尺寸大,雷达回波强。
普通集装箱卡车,总长14.6米,高度4.2米,宽度2.55米。普通轿车一般长度是3.5米到6米之间,宽度在1.6米到1.8米之间、高度在1.4米到1.6米之间。雷达探测过程中大型车辆对小型车辆的影响来自两个方面,一个是物理遮挡,另一个是接收机AGC控制、频率增益控制动态范围受限条件下,对远距微小目标的抑制。当大车存在时,雷达对大车旁边的小车、远距的小车探测闪烁、不稳定。
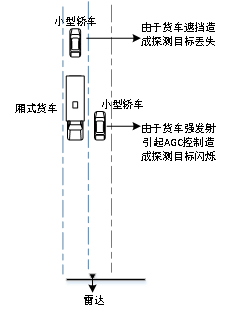
图1 大车遮挡引起目标丢失及闪烁
车型的识别是交通雷达中一个重要的指标。雷达对车型识别的基本策略是在同车道同速的约束条件下合并目标来识别车长的。当高速公路拥堵、缓行情况下,雷达存在将多辆缓行的小车识别成大车,或者将长挂车识别成多辆小车的误检测。
二、道路指示牌、金属隔离栏造成的多径干扰
场景1
在雷达探测过程中,多径是指雷达发射信号从发射天线经过多个路径到达被测目标,目标回波再经过多个路径抵达接收天线的传播现象。多径干扰是指除直达波意外的所有多路径回波。
高速公路场景下,交通雷达的典型多径干扰来自道路指示牌、金属隔离栏。金属隔离栏带来的多径干扰目标特征比较明显,方位向与真实目标关于隔离栏轴对称。如下图所示。
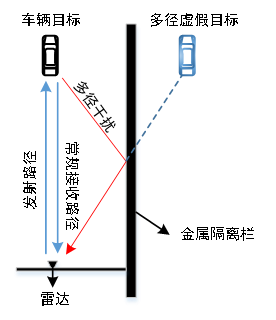
图2 金属隔离栏引起的多径干扰虚假目标
场景2
图2中的虚假目标与真实目标纵向距离相同,速度相同,唯一不同的是横向距离不同。当真实目标与虚假目标与雷达的夹角α远大于雷达的角度分辨率,通过给定先验知识——隔离栏的具体位置,是可以比较容易地滤除虚假目标并保留真实目标的。如图3所示。
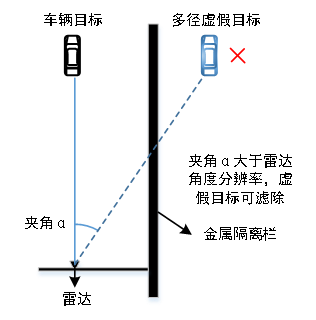
图3 可滤除的多径虚假目标
场景3
然而,当真实目标与虚假目标与雷达的夹角α远小于雷达的角度分辨率,或者与角度分辨率相当,真实目标会与虚假目标在方位上合成另一个新的虚假目标,此时,雷达无法探测真实目标,只能检测到新的虚假目标,其横向位置在隔离栏附近。如图4所示。对于这种情况,唯一解决方法就是提高角度分辨率。
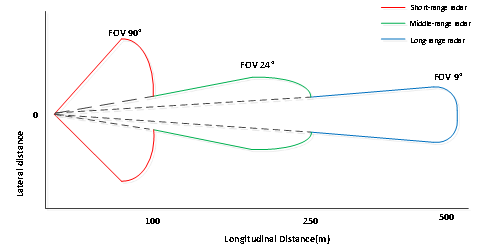
图4 不可滤除的多径虚假目标
场景4(道路指示牌干扰情况)
道路指示牌带来的干扰相对情况比较多。这里举两个在具体项目中实际发生的例子。
如图5所示,雷达距离大型半挂车辆的距离为D_car,大型半挂车辆的车长为L,雷达距离金属道路指示牌的距离为D_sign。多径干扰目标的传播路程为,雷达发射信号直达金属指示牌,经反射后抵达大型半挂车尾部,再经反射后返回指示牌,最后经指示牌反射后被雷达接收机捕获。
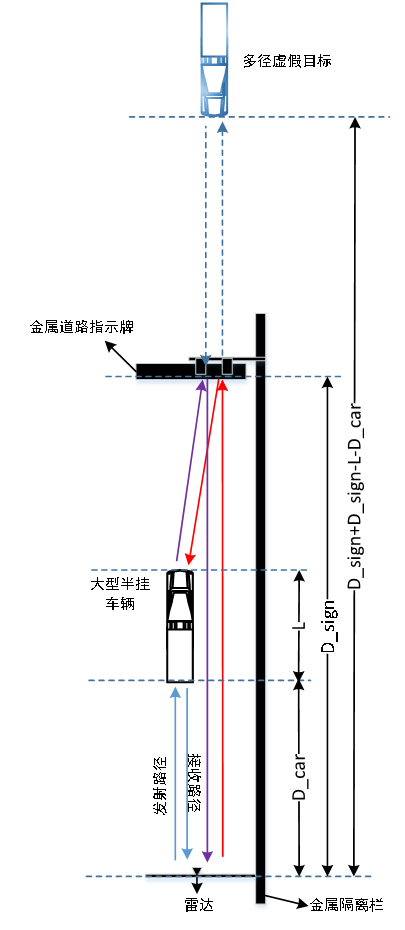
图5 大型半挂车目标回波与道路金属指示牌
引起的虚假目标
图5中多径虚假目标的特点是,距离为D_sign+D_sign-L-D_car,速度方向与真实目标相反,数值相同。距离、速度满足运动方程。
场景5(道路指示牌干扰情况)
以上为单路牌引起的多径干扰,再举一个真实发生的两路牌产生的多径虚假目标。如图6所示。
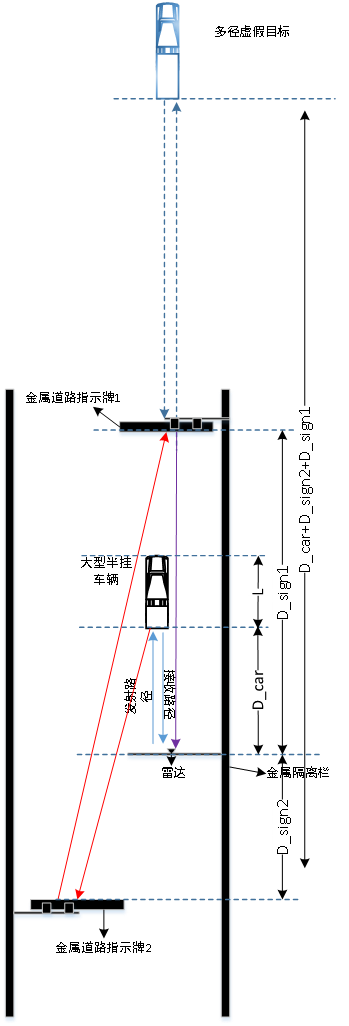
图6
图6中,雷达距离大型半挂车辆的距离为D_car,雷达距离金属道路指示牌1的距离为D_sign1,距离指示牌2的距离为D_sign2。多径干扰目标的传播路程为,雷达发射信号直达被测车辆,经反射后抵达道路指示牌2,再经反射后传播至指示牌1,最后经指示牌1反射后被雷达接收机捕获。
图6中多径虚假目标的特点是,距离为D_car+D_sign2+D_sign1,速度方向与真实目标相通,数值相同。距离、速度满足运动方程。
经过几个多径干扰例子分析可以看出,交通雷达在复杂场景下得到较好的探测效果,需要针对场景中的强反射点进行细致深入的分析,得到特定场景下的滤除干扰目标的算法后,再进一步优化雷达程序。
由上可知,交通雷达的调试具有专业性、定制性,雷达生产厂家的售后服务是项目交付过程中重要的环节。
HT-MTTR-L2型雷达
黎明瑞达公司生产的HT-MTTR-L2型雷达,采用远、中、近独特的三波束技术,可对横向10车道、纵向500米范围内的目标进行稳定跟踪,实时探测目标的位置、距离、运动方向和速度等信息,同一时刻最多可检测512个目标。其外形如图7所示。
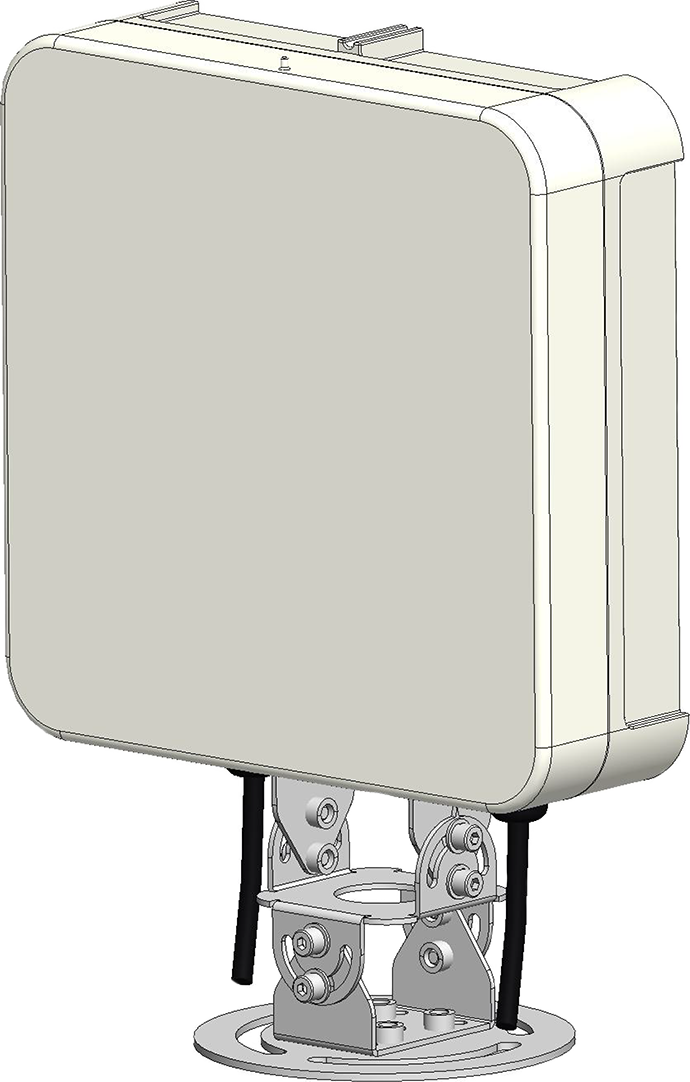
图7
HT-MTTR-L2雷达近距波束张角为90°,探测范围为0到100m,下压角度为10°;中距波束张角为24°,探测范围为100m至250m,下压角度为5°;远距波束张角为9°,探测范围为250m至500m,下压角度为0°。作为市场上唯一的多波束下压角度设计产品,更好地适应不同高度的安装,其优势在于盲区小、目标探测能力强、跟踪稳定。
图8 HT-MTTR-L2雷达张角



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
