




 广告
广告





















































力学测量术语揭秘 | ISO 376标准的特征量

在力学测量中,往往会涉及很多专业术语。在查看相关技术文档时,您了解这些术语的含义吗?
关于基于应变的力传感器专业术语,我们将分为如下5个方面去介绍:
-
ISO 376标准的特征量
-
温度数据
-
精确度
-
电气特征
-
机械特征
这期,我们将介绍基于应变力传感器的 ISO 376标准的特征量。
按照ISO 376标准校准的力传感器被分为不同的精度等级。最高精度等级是00,其次是0.5、1和2。对于下面提及的每项特性,四个精度等级都有一个极限值。因此,如果除重复性之外,力传感器的其它所有特性都可以被分配到最精确的等级(00),则在这个负载级上,传感器总体会被分配到其重复性指标所达到的等级。
我们对以下特性进行了评估:
-
复现性相对误差
-
重复性相对误差
-
插值相对误差
-
零点相对误差
-
可逆性/滞后相对误差
-
蠕变相对误差
-
力校准的扩展不确定度
注:精度等级数字越低,表示传感器越精确
复现性相对误差(b)[%] 再现性误差表示在不同安装位置下相关负载级的算术平均值差异。此程序在ISO 376中作了规定。安装后,力传感器在一个安装位置逐步加载,然后拆下,旋转120°并重新安装。在新的位置上采用与第一次系列测试相同的负载级完成一系列测试后,再一次拆下传感器并旋转120°,并采用相同的负载级再测量一次。然后根据每个负载级的结果来计算再现性。因此,校准证书显示了每个校准负载级的再现性误差。这个数字是相对于测量的力值而言的。
重复性相对误差(b')[%] 重复性是指在安装位置不变的情况下,当前负载级的偏差。因此,其表示了一个传感器在固定安装位置上的再现情况。在此试验中,传感器承受了两次相同的加载,未进行任何拆卸或重新安装。同样,在校准证书上,这个重复性误差是相对于测量的力值而言的。
(相对)插值误差(fc)[%] 对于参考力传感器(U15、top 级传感器……),会显示相对于测量值的插值误差。通常,根据ISO 376标准进行的校准并不产生一个衡量灵敏度的特征值,而是一个函数。因此,插值误差是传感器的真实特征曲线与表示校准结果的函数之间的差异。
重要提示:测量不确定度的影响不是相对于满量程而言的,而是相对于所测的力值。在HBK,插值相对误差在校准证书上以三次函数表示。
(相对)零点误差(f0)[%] 相对零点误差是指零点的偏差。为了确定零点误差,在加载和卸载循环后来绘制零点信号,它是零点返回的度量。
可逆性/滞后相对误差(v)[%] 可逆性(滞后)相对误差描述了负载增加或减小时的特征曲线差异。在HBK,始终会在数据表上注明曲线的最大可能偏差。因此,单个传感器的滞后很可能(远)小于数据表中给出的值。
根据DIN EN ISO 376标准,可逆性误差指标不是在固定力下确定的(参见VDI/VDE 2638中的相对可逆性误差/滞后),而是在一个范围内(例如,Fnom的 10%~100%)。
你会在校准证书上看到每个负载级的滞后指标。
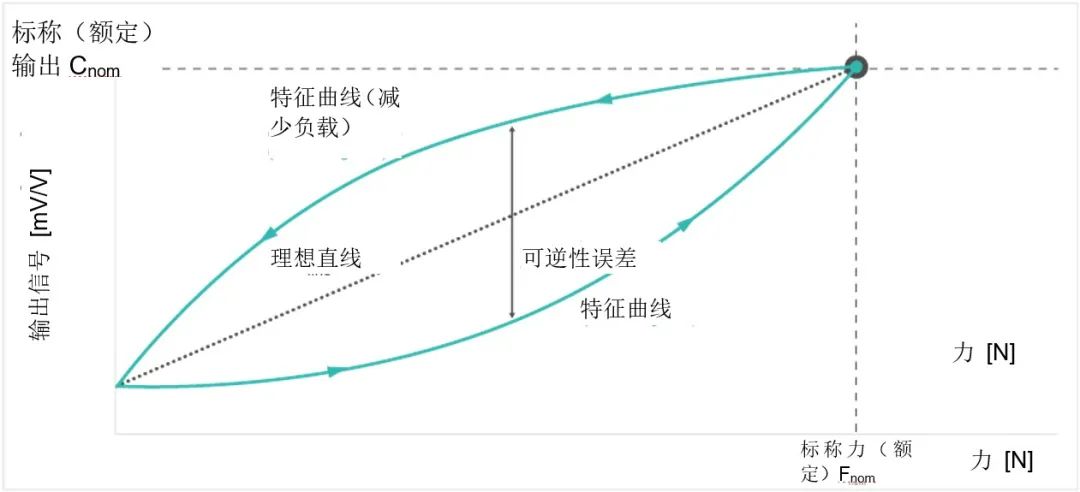
说明滞后的加载和卸载过程的基本示意图
蠕变 (c) [%]在恒定负载下,基于应变计的传感器在信号中显示出与e函数相似的轻微变化。这个过程被称为加载后蠕变。如果力被撤消,信号会以大致相同的方式在相反的方向上变化。这称为卸载后蠕变。
最大信号变化以相对于施加力的百分比表示,而不是相对于标称力 (Fnom)。类似地,所述时间是信号变化被测定的时间——通常在5分钟或30分钟后。
由于曲线图采用e-函数的形式,因此将数据表上的数字表示为蠕变最大值是一种非常好的近似方式。这个数字不能以线性方式推断;因此,如果观察时间增加一倍,蠕变也不会增加。
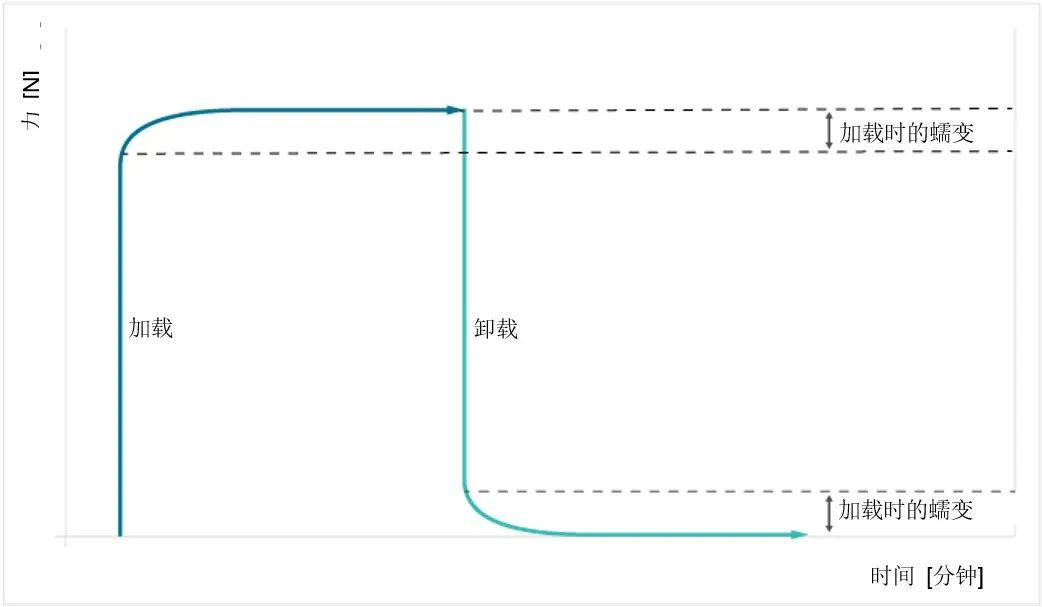
力传感器蠕变示意图



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
