




 广告
广告





















































解读《ISO 34502 AB》

SASETECH
是国内首个由汽车安全专家发起组建的技术社区,致力于为汽车安全的从业者提供交流、学习、合作的中立性平台。

引言
解读《ISO 34502 AB》
为了安全地将自动驾驶系统(ADS)引入市场,需要开发社会可接受的和技术健全的基于场景的安全评估方法。许多国家和国际政府机构正在逐步发布技术安全指南,以支持这些安全评估方法的开发。其中,国际标准 FDIS34502 描述了基于场景的安全评估的工程框架与过程,该标准由由4个章节及12个附录构成,包括面向安全评估的场景生成流程、场景框架结构、数据库存储与接口架构、逻辑场景参数及道路交通参数选取等内容。
本文主要包括ISO34502的附录A、B两章内容的解读,介绍了基于物理原理分析方法的框架、以及交通相关的关键场景,希望为功能安全及预期功能安全开发人员提供一定的帮助。
A
基于物理原理的分析方法概述
通常认为ADS在实际交通中可能面临的与安全相关的风险因素的数量是无限的。当采用基于场景的安全评估方法时,有必要对场景的结构进行分析。这种场景结构可以通过多种方法来实现,包括但不限于从ADS外部(例如Pegasus六层场景)、从ADS内部(例如SAKURA三层系统)进行描述,或者通过建立一个事故数据库中报告的场景结构和相应模式之间的关系。附件A概述了一种从ADS内部描述的场景结构。
与ADS在实际交通中可能面临的无数安全相关场景相比,ADS可用于安全处理此类场景的物理原理的数量是有限的。目前,通常将ADS的动态驾驶任务(DDT)分解为感知、规划和控制子任务,每个子任务都与一个或几个特定的物理原理相关联。例如,感知子任务由基于相机、毫米波雷达和激光雷达的系统实现,这些系统依赖于分别控制光线、无线电波和激光传播的物理原理。同样,规划子任务是通过基于交通参与者的相对运动学的路径和速度规划来解决的,这是物理学中点、对象和对象组系统的运动原理。最后,控制子任务可以通过车辆动力学来实现目标路径和速度的跟踪,这是与动力学及其对运动学的影响研究有关的物理学分支。
因此假设,如果根据ADS的物理特性对风险因素及其相应的潜在关键场景进行分解和逻辑结构化,则有可能提供所有风险因素的整体覆盖。图1描述了基于与感知、判断和控制子任务相关的ADS物理原理的感知、交通和车辆控制相关的关键场景。
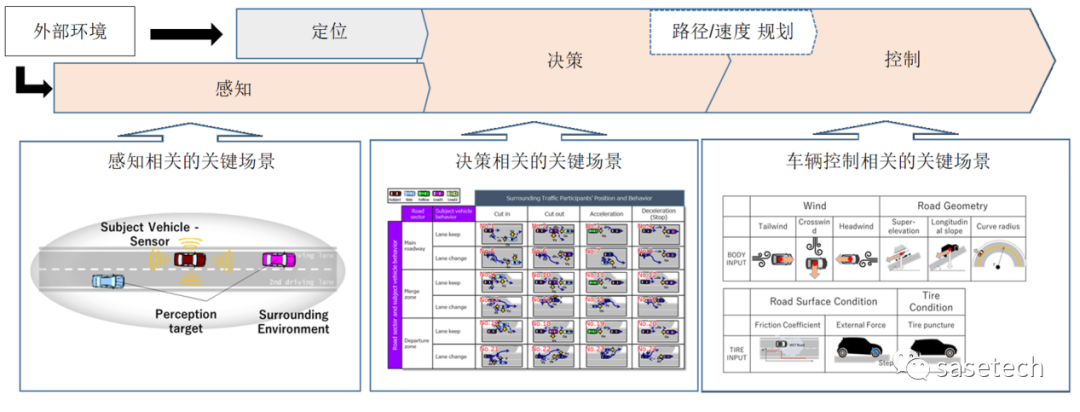
这种方法可以与不同的方法相关联,以根据交通状况、感知和车辆控制相关的风险因素以及基于性能参考模型(例如UN/WP29/R157)的相关安全测试目标来参数化结构化的关键场景监管,如图2所示。
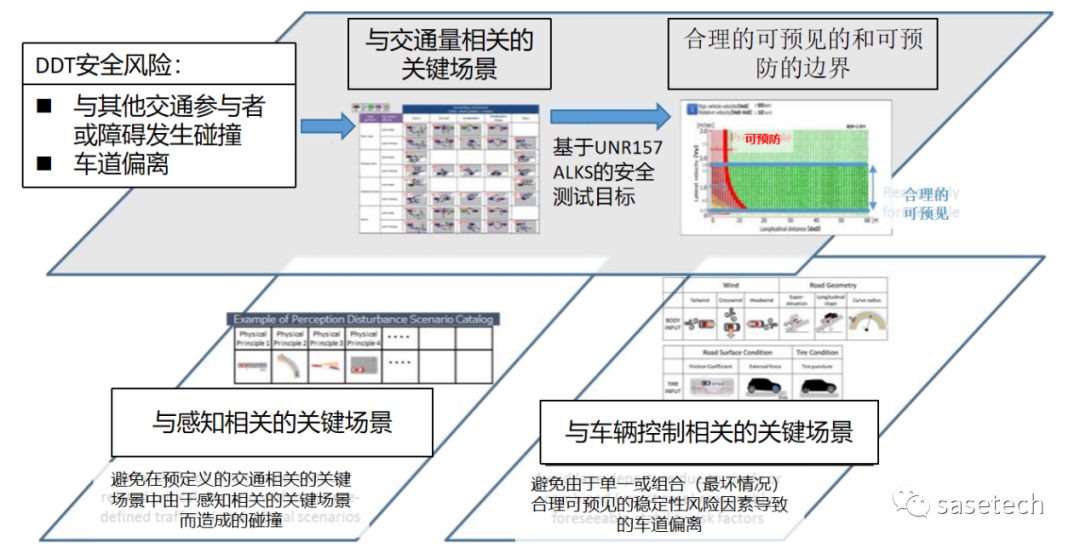
通过为每个交通相关的关键场景系统化和定义合理可预见和可预防的范围,只要法规建立了定量标准,这些标准就可以纳入测试。当结合不同的因素和变量来开发场景并定义相应的参数范围时,可以使用现实世界观察到的数据来防止产生现实中不存在的场景。基于这种交通相关的关键场景,可以扩展评估,将感知和车辆控制相关的关键场景纳入评估。
B
交通相关的关键场景
附件B定义了与附件A中概述的物理原理方法相关的特定交通相关风险因素及其相应的结构化关键场景。附件B输出的是一组结构化的功能性交通相关关键场景。
交通相关的关键场景分为一般车辆场景(包括四轮车和摩托车)、摩托车特定场景和其他交通参与者或障碍物特定场景。
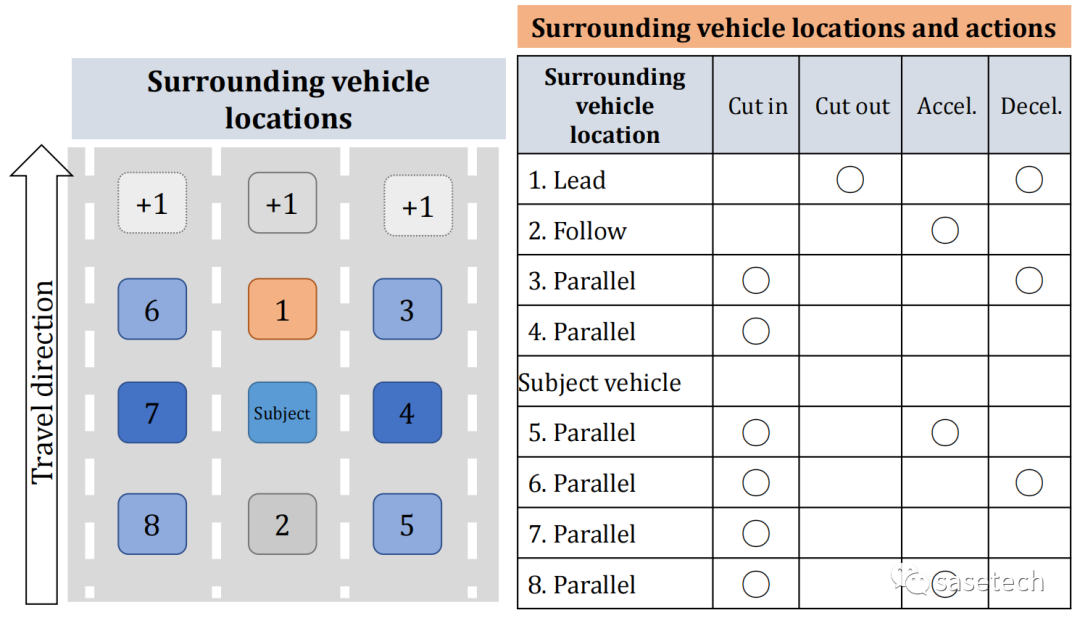
其中,针对一般车辆交通相关的关键场景,通过系统地分析道路结构、本车车辆行为、周围车辆位置和行动的不同组合,生成了一个总共包含24种可能的组合矩阵,如图3。

在这里,道路类别被分为三类:主路、汇入和汇出。本车车辆行为分为车道保持和车道变换。周围车辆的位置被定义为目标车辆周围八个方向的相邻位置,可能的动作分为四组:切入、切出、加速和减速。从安全评估的角度来看,可以通过关注目标参与者可能阻碍目标车辆轨迹的动作来最大限度地减少评估测试的次数,如图4。例如,车辆在位置 5、2 和 8 的减速不会对目标车辆造成阻碍,因此可以从安全分析中排除。图中的圆圈表示周围车辆位置和动作的相应组合可能对目标车辆造成阻碍的情况,因此需要在安全分析中加以考虑。
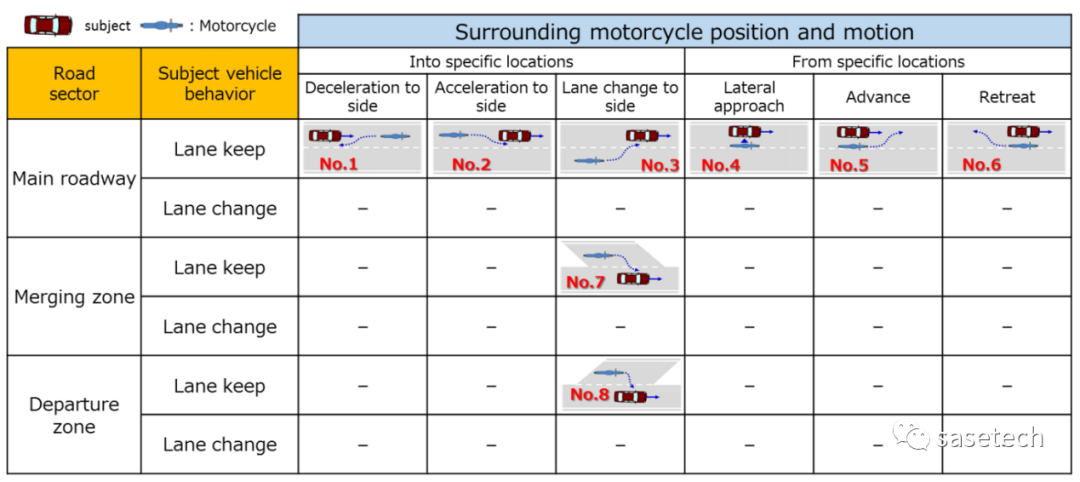
一般来说,前面描述的周围车辆位置和动作的分类适用于四轮车和摩托车。但是,在某些情况下,摩托车可能会在与目标车辆相同的车道内穿过缩小的空间,从而引发额外的安全相关场景。这里添加并应用了两个额外的位置定义(左和右),以定义一系列可能影响周围八辆车辆的可能场景。
如图5左侧所示,摩托车特定位置[L]和[R]位于目标车辆的任一侧并在同一车道内。摩托车可以通过(a)从领先位置1减速、从后部位置2加速(b)或从周围位置3、4改变车道(c)移动到这些位置(如图中间部分所示),5,6,7或8。如图右侧所示,摩托车也可能移出位置[L]和[R]。他们可以通过横向倾斜和接近目标车辆(d)、前进(e)到领先位置、后退(f)到后部位置来做到这一点。
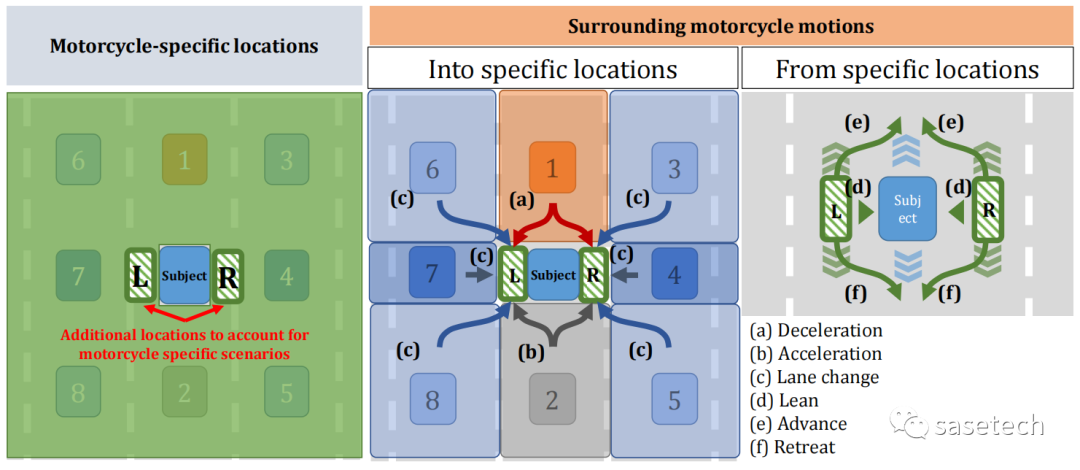
产生的摩托车特定交通相关的关键场景可以由总共包含36种可能组合的矩阵表示。其中,所有涉及本车变道的组合都被排除在外,因为一旦本车启动变道操作,摩托车就无法执行任何预定义的摩托车动作。因此,最终总共剩下8个场景在实际交通中是可行的,如图5所示。
对于其他交通参与者(例如行人或骑自行车者)或车道上的障碍物(例如坠落的物体、动物、临时装置)的其余关键场景可以通过对一般车辆场景并用相应的交通参与者或障碍物代替周围的车辆。
张策 / 作者
张玉新 | 校阅







最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
