




 广告
广告





















































基于正弦曲线的自动车辆横向运动规划方法

(2)在保持侧向位移和零转向角不变的情况下,利用v1和v2的正弦输入将车辆转向目标余弦值;
(3)由于系统(4)现在处于奇异位置,我们用u1恒速控制到达目标位置。为了处理这一步,全局参考框架应该与目标配置对齐。尽管上述过程看似合理,但实际上仍然很难应用。首先,在步骤(1)中,我们要仔细选择v1输入,使y趋近于它的目标值,并确保它返回零,因为在步骤(2)之后v1的值应该收敛于零。假设u1为正,方向θ也应归零。实现第一步的困难与整个问题是一样的。换句话说,提议的过程很难开始。另一个问题是,对于任何正弦输入,如asin(t)+bcos(t),它的值越过零点,v1的负值导致负车速u1,这对我们的目的来说是不可接受的。为了克服上述问题,我们建议将前两步合并为一步过程,并使用带偏差的正弦曲线,表示如下:

这里的频率ω=2π/τ, τ表示计划运动的周期。a1,b1,c1, a2,,b2和c2是待确定的设计参数。在此过程中,控制输入v1和v2均为
正弦函数,为实际应用带来了方便。对(6)积分一段时间,根据状态y和φ的目标值,可以确定偏差c1和c2。根据输入的扩展形式,周期过后输入v1的值保持不变。这里我们考虑两种情况。如果一步过程改变了车辆方向,那么车辆的初始或最终速度应该为零,以满足v1(0)=v1(τ)=0的关系,因为我们总是倾向于根据初始或目标配置来选择全局帧。如果一步过程不改变车辆方向,则始终满足上述关系。由于我们不应该要求车辆在计划的时间前后停下,一步法更适用于横向运动的情况(如变道)。接下来,我们主要关注横向运动情况,选择与初始构型一致的全局参照系。显然,v1(0)=0表示b1+c1=0。除非我们选择a1=0,那么v1剖面将穿过零点。接下来,我们建立(6)中的六个参数之间的关系,以确保 α 值在一步过程之后不会改变。根据系统(4)和控制规则(6) ,对前轮转向角度进行了如下整合,

对于系统(4)的结构,我们把状态方程α看作一个类似的链式形式,因为当转向角接近零时,函数tan (φ)≈ φ。扩展功能
用它的傅里叶级数,我们有,

通过对 α 的微分方程积分一个周期,最终的值可以得到如下,
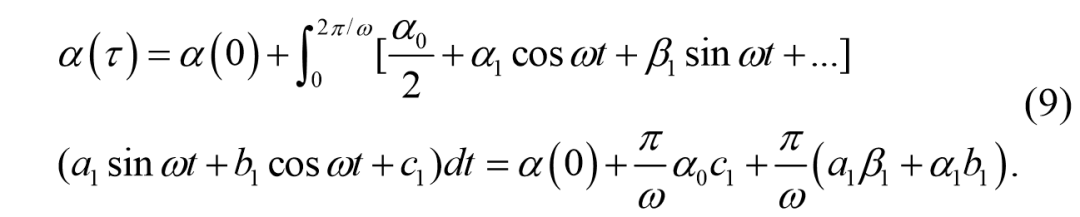
由于正弦曲线的良好特性,只有几个项有助于α的变化。对于这些项的解析表达式,根据(7)近似得到以下傅里叶系数,
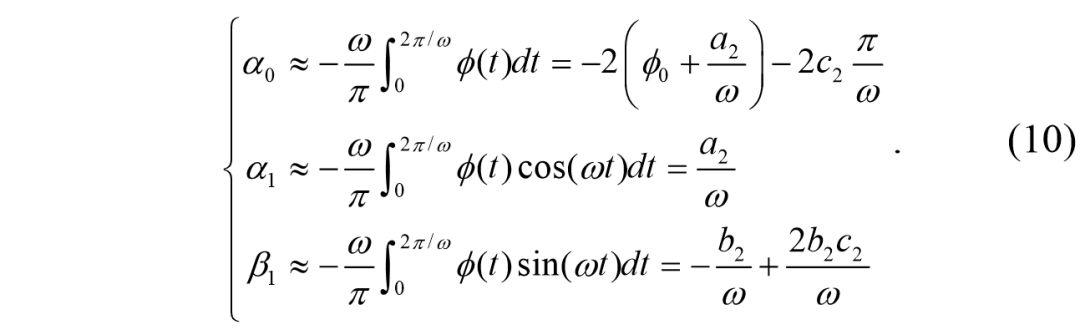
将这些值代入方程(9),我们得到,

这里我们得到了α的转移函数的一个线性估计。此外,如前所述,在建议的一步过程之后,车辆的方向不应该改变,也就是说,

将
代入(12) ,得到

。假设平面运动前后的转向角
为零也是合理的,导致
。遵循这些原则,系统(3)的开环控制规则可以概括为:

其中

是一个给定值不大于物理极限的最大转向角。根据给定的控制规则,可以精确地实现所需的横向运动,并且通过积分(3)中的第一个方程来确定纵向位移
。如果目标的纵向位置大于
,我们可以用一条直线路径来补偿这一误差,这条直线路径可以在计划的横向运动之前或之后灵活安排。
然而,一个约束,我们应该进一步考虑来自初始车速

。根据(13)中的

控制规则,当t→0时,分子和分母都收敛到零。我们根据洛必达法则表示初始速度,

该方程建立了给定
的周期τ与最大转向角
之间的关系。这意味着不可能同时调整路径模式(用
)和周期时间。此外,由于
是上界的,因此τ的周期不能任意小。在紧急情况下,如规避转向,τ的限制可能是不可取的。为了摆脱约束(14) ,我们建议引入一对对称的过渡期,以帮助实现可调速度分布。进入/离开过渡的周期表示为
。在入口过渡的开始,我们试图增加转向角度尽可能快到
产生初始横向速度
。类似地,当人类驾驶员在回避转向和回收情况下做出反应时,在离开过渡结束时,我们可以很快地将转向角度恢复到零。不考虑开始/结束脉冲,(13)中的控制规则可以修改为,
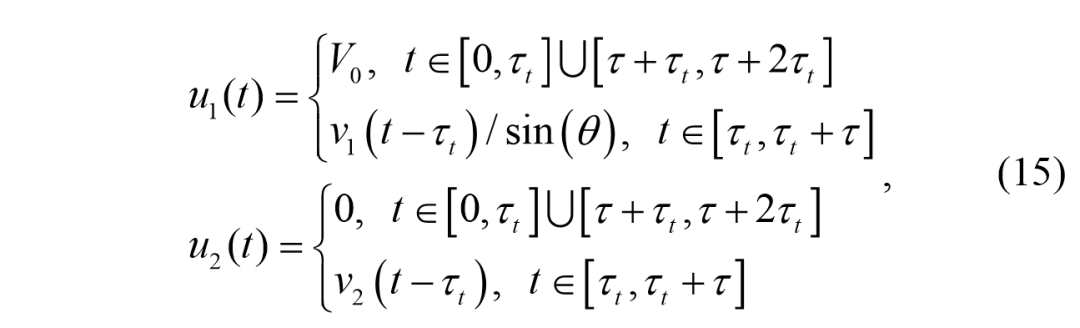
其中
是初始车速。然而,现在(6)中参数的确定是不同的。原点条件
和
转化为,

为了简单起见,我们仍然选择



编辑推荐




最新资讯
-
ESI 全新BM-Stamp软件在汽车行业冲压仿真精
2025-04-02 09:27
-
车辆软件测试工程师的工作内容---解读GBT德
2025-04-02 08:41
-
浅谈机动车检测行业合规经营与检验人员职业
2025-04-02 08:40
-
NOA该允许驾驶员脱手么?
2025-04-02 08:37
-
联合国最新汽车法规清单(到R176)
2025-04-02 08:31
