




 广告
广告





















































基于正弦曲线的自动车辆横向运动规划方法

)的泰勒展开来获得θ(y)的解析表达式。将上述等式积分,可以得出:

最后,由最终位置构成的路径的功能表示为:

图3(a)使用tan(
)的一阶和二阶展开说明了G(y)的功能。如图所示,二阶展开给出了可到达的集合边的更精确估计。然而,我们注意到,只有当车辆方向变化很小以确保sinθ(t)≈θ(t)时,这种估计才是合理的。在正常的驾驶情况下,这种情况并不难满足。
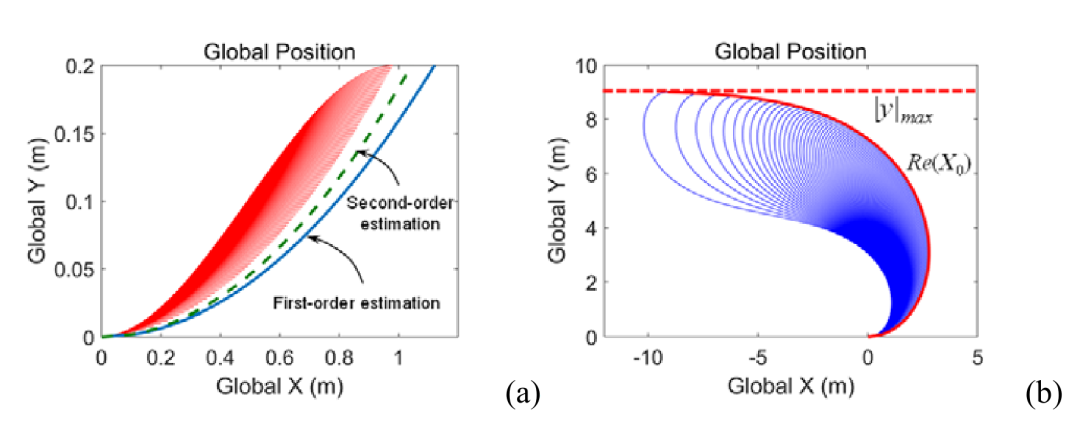
图3

的形状 (a)为关于原点的放大视图(b)为上半部分的整体视图
我们还通过数值积分给出了图3(b)中一步横向运动模式的可达集
的例子,它提供了可达区域形状的概述。如果我们将
视为沿X轴对称,则
的边缘由两条水平线和两条如图3(b)中所示的红线组成(图3(b)中仅显示了一半)。另外我们应该注意到的是,水平线和曲线永远不会相交,因为曲线的斜率在负无穷大处收敛为零。最大值|y|max存在,这是因为我们应该在横向运动过程中将θ保持在区间[0,π]或[-π,0]内。然而,分析估计和图3中的结果都是保守的,因为我们没有考虑转换的影响。
4 实验验证
提出的横向运动规划算法是在模型车平台上进行测试的。该平台由1:14模型车和室内GPS组成。由于所提出的方法基于轮胎无滑移假设,由于几何相似性原理,模型车可以很好地反映真实汽车的运动学行为。这辆模型汽车是通过一个单刷直流电机、一个传动轴和前后轴的差速系统进行全轮驱动的。前轮转向由带有转向连杆的直流伺服电机控制。转向和推进执行器均由PCA9685脉冲宽度调制(PWM)驱动器控制。电控单元由Raspberry Pi单板计算机实现,通过局域网从室内GPS接收数据,计算PWM输入值,用于推进和转向控制。室内GPS是基于摄像头的,它从八个摄像头获取图像并在线重建对象的3D位置/方向(原始数据)。整体硬件架构如图4所示
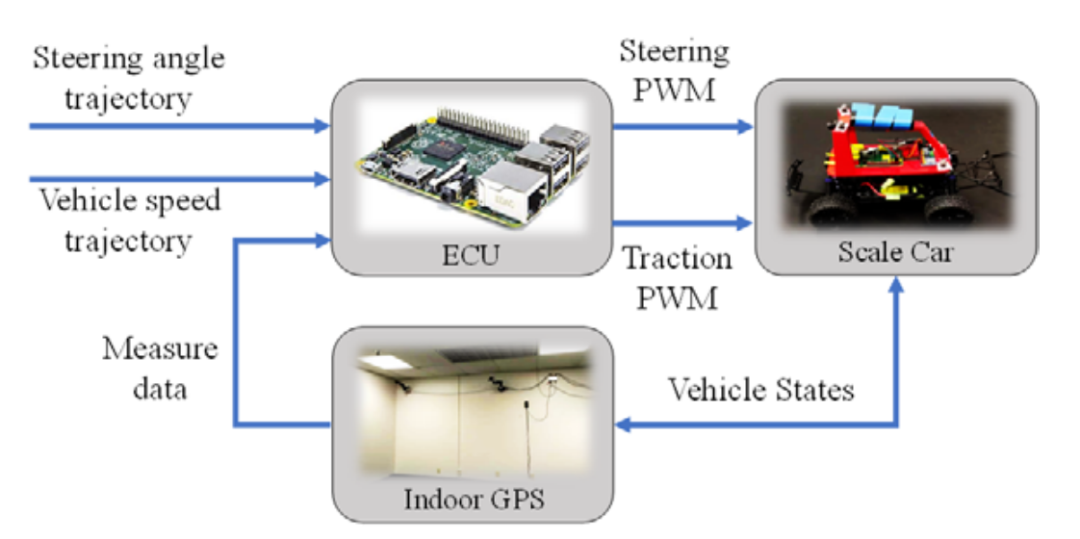
图4 模型车平台的硬件架构
根据公式(3)描述的车辆运动学模型,前轮的车辆转向角被认为是左/右轮转向角的平均值。如果前轮转向角度很小,我们可以假设伺服电动机位置角与平均前转向角之间的线性关系,无论连锁几何形状和机械误差如何,并且可以在物理上测量线性因子。通过设置目标伺服位置角的相应PWM输入,我们将开环控制器应用于模型车的转向输入。车辆速度控制很具有挑战性,因为直流电动机输入与真实车辆速度之间的关系是高度非线性的。因此,基于在线测量的反馈控制法是有必要的。关于系统(4),我们还应获得车辆偏航角,以计算纵向车速的期望值。此外,原始的GPS数据仅包括车辆位置和偏航角,这些数据由于信号噪声无法直接使用或被区分出来。因此,我们应用代数分化估计器(ADE)来实时确定请求的值[15]。为简单起见,反馈规则是基于一阶滑动模式方法设计的,以解决与真实系统相比时模型的不准确性。考虑到模型车和室内GPS的性能限制,初始状态和运动规划设计参数的取值如下,初始车速

m/s,目标y位置为0.5m,过渡期
和主周期τ分别为0.2s和3s。最大转向角是物理限制的一半。在图5中显示了实验数据与模拟结果的比较。
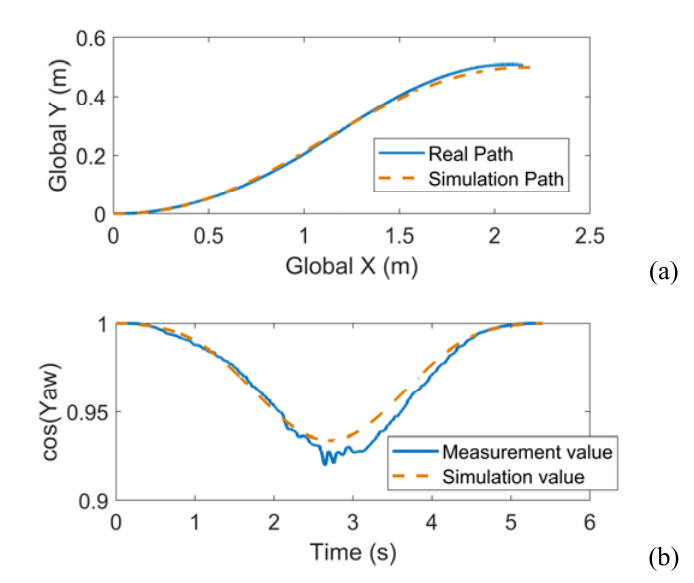
图5 模拟数据与实验数据比较(a)车辆位置(b)车辆方向
我们从比较中注意到,所需的车辆状态,包括全球位置和偏航角,都很好地实现了。在最终点,车辆的偏航角回到初始值,并且最终的车辆位置接近期望点,体现了所提方法的可行性。但是,与理想的仿真模型相比,仍然存在状态误差,主要是由于车速跟踪不准确。图6展示了一步过程中的真实车辆速度,并与跟踪参考值和仿真值进行了比较。
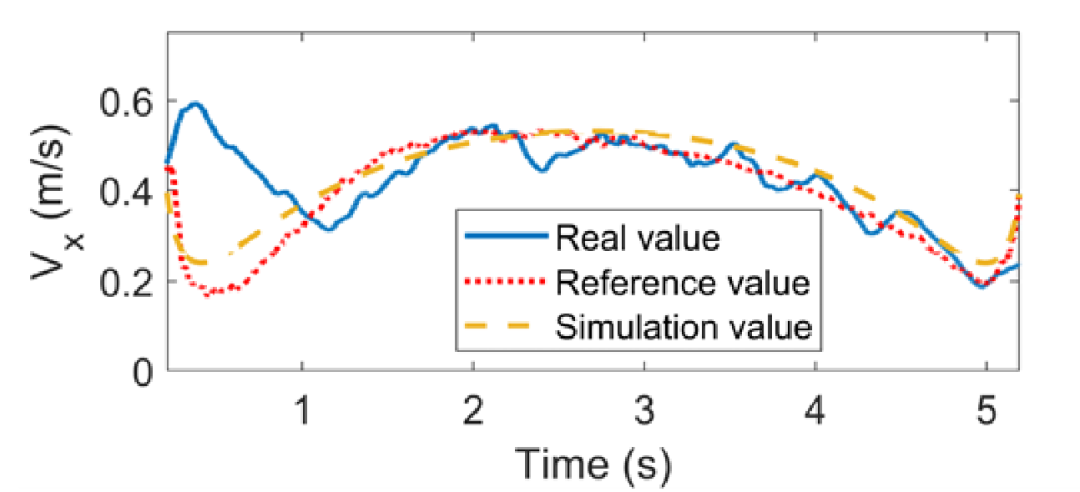
图6 模型车测试中的速度轨迹跟踪
在图6中,至少在开始时,速度轨迹跟踪存在一些误差。多个方面都可以解释这一情况,包括油门输入死区、通信延迟、电源电压降效应和模型车制动能力的限制。然而,速度轨迹表现良好。由于端点附近的横向车速非常小,因此跟踪误差对最终结果的影响有限。通过使用更先进的反馈控制技术,跟踪性能有提高的潜力。
5 结论
在本文中,基于链式车辆模型和正弦输入,我们提出了一种特别适用于车辆变道机动的横向运动规划方法。为了进一步确保可调节的速度曲线,我们在两端引入了一对对称的过渡路径。此外,我们还研究了参数调整的原理和横向过程的可达性问题。最后通过实车实测验证了所提出的运动规划算法的可行性。未来的工作我们将聚焦在反馈控制上,以跟踪计划的路径并研究闭环性能。
参考文献



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
