




 广告
广告





















































基于正弦曲线的自动车辆横向运动规划方法

编者按:自动驾驶车辆的路径规划问题存在着诸多的解决方法,包括主要应用在全局规划的的A*、RRT快速搜索算法和遗传搜索算法等,以及主要应用在局部规划的DWA算法和APF算法等。路径规划的最终目标是在短时间内生成一条符合车辆/机器人运动学和动力学要求的最佳路径,确保被控对象在准确快速的到达指定目标位置的同时,尽可能地规避全局路径上新出现地障碍物。近年来,随着无人驾驶技术的不断发展,结合了车辆运动学和动力学模型的路径规划算法也相继出现,该类型的解决方案以传统规划为基础,在路径生成的决策规划层通过引入车辆自身的约束条件,保证得到的实际路径的可执行性。
本文译自:
《A LATERAL MOTION PLANNING METHOD FOR AUTOMATED VEHICLES baseD ON SINUSOIDS》
文章来源:
Dynamic Systems and Control Conference
作者:
Wei Wang,Zejiang Wang,Xinbo Chen,Junmin Wang
原文链接:
http://asmedigitalcollection.asme.org
摘要:对于自动驾驶应用,特别是在复杂环境中,精确的运动规划对避障和当地驾驶至关重要。从微分几何的角度处理这个问题有助于简化控制和规划过程。与经典的微分几何方法只能得到前后运动的分段解不同,本文探讨了正弦曲线在连续速度要求和系统非完整约束下的精确运动规划中的应用。通过将车辆运动学模型转换为类似的链式模型,我们应用带偏差的正弦输入来生成参考轨迹,并讨论了给定横向位移的参数选择原则。为了克服洛必达规则带来的额外约束,我们引入了一对进入/离开过渡期,以确保可调的速度剖面和设计灵活性。由此产生的轨迹反映了对变道或躲避转向场景的强适用性。由于所提出的方法优于正/连续速度约束而不考虑小时间可控性,因此进一步研究了可达性问题。给出了可达区域边缘的解析估计,并与数值模拟结果进行了比较。最后,室内现场试验验证了该方法的可行性。
关键词:运动规划,自动化车辆
1 引言
无碰撞运动规划(MP,Motion Planning)是机器人技术的核心问题之一,有着悠久的历史。随着路线图方法的发展和对经典的“钢琴搬运工问题”的研究,在几何环境中的MP问题被充分理解并解决了。然而,对于类车机器人或车辆系统的开环MP问题,应在规划算法的同时考虑系统的非完整性,特别是在狭窄空间和复杂避障场景下,如传统完整方法无法解决的停车问题[1]。事实上,直接找到一个曲率上界车辆系统的可行路径并非易事。Fortune和Wolfgang证明了约束路径的决定性问题在EXPTIME(确定性图灵机可在指数时间内解决的所有决策问题的集合)[2]上。目前解决系统非完整性的方法主要是基于抽样方法和碰撞检查等。使用一组固定机动(离散集合)[3]生成一个格图,它不仅表示位置,而且表示其他状态。快速探索随机树(RRT)方法是一种基于系统微分方程和随机选择输入的树状结构展开方法,适合于解决系统非完整性和高自由度(包括Kino-dynamic)问题。 在基于采样的路线图构建过程中,设计一种精确的转向方法,将车辆从初始配置引导到目标配置是非完整车辆系统的一个关键问题。文献中提出了几种转向方法。对于对称可控系统,转向方法的设计通常采用微分几何的方法。Lafferriere和Sussmann通过从P. Hall族中选择控制李氏代数的一组基,提出了幂零或可零系统的一般策略。对于一个类车机器人MP,得到的精确路径包括26块[4]。通过将系统转换为链式形式,Murray和Sastry提出了多级正弦输入控制链式系统的应用。产生的路径仍然是离散的[5]。在[6]中,利用微分平面度特性将问题简化为平面C2曲线设计,建立了路径曲率与转向机动之间的关系。精确的MP问题也可以用最优控制理论来处理,其中最短长度问题是研究最多的。尽管大多数最优路径的求解依赖于数值方法例如直接或间接射击等,但对于简单的车辆运动学,经典结果如杜宾路径[7]和RS路径[8]已通过庞特里亚金极大值原理[9]被证明是长度最优的。此外,非完整转向方法的拓扑性质决定了遵循完整路径的可行性。通过将完整路径离散到足够小,考虑非完整无碰撞路径的转向方法,可以到达附近的每一个构型[10,11]。这个特性是基于系统是可控的假设。 在更多细节和需求被考虑后,大多数为类车机器人设计的MP方法都适用于自动驾驶汽车[12-14]。由于路径变化和转向机动之间的差异已经被很好地理解,在几何上用不同的曲线(如线和圆、回旋线和多项式)插值已知的路径点是自然和直接的。但其明显的缺点是:路径曲率变化复杂,与典型转向机动不对应,给在线执行带来了困难。此外,在解决连接条件和曲率限制等设计约束时,采用4小时或更高阶插值曲线,使得路径点方法计算量十分大。为了简化精确转向方法和MP过程中的机动,我们从微分几何角度来处理自动车辆MP,并应用带偏差的正弦输入来避免离散/尖点机动(对应于倒车换挡)。该方法对变道和躲避转向具有较好的适用性。然而,由于正/连续速度约束,这种方法不再考虑局部可控性。因此,我们也进行了可达性分析。本文的其余部分组织如下。第二节介绍了基于链式车辆系统和正弦输入的MP方法,以及参数选择原则。对于横向运动机动,第三节研究了该方法的可达性问题。在第四节中,我们对基于规模汽车平台的规划算法进行了测试,验证了所提方法的可行性。第五节对这项工作做出总结。
2 横向运动规划法
2.1 车辆运动学模型
实际地面车辆的运动约束通常是基于轮胎防滑假设来考虑的,这在正常驾驶条件下大致正确。在此假设下,自行车模型(图1)被广泛应用于车辆系统的MP和动态控制中,其中具有以下非完整约束。
当我们将运动学关系转化为具有指定输入的微分方程时,约束仍然存在。从驾驶员的角度来看,汽车系统有两个输入,占两个自由度,即加速器(油门)和方向盘。为简单起见,我们将后轴的中点作为参考点。在不丧失一般性的前提下,我们假设后轴和前轴l之间的距离为1。我们用v表示前轮的平均速度。前轮方向和车辆方向之间的角度用φ表示,φ完全由驾驶员的输入或执行器控制。在指定的全局参考框架下,我们用θ定义车辆方向。简单的论证将我们引向以下控制系统,其中
和

分别代表油门和转向输入。
由于我们所关心的是车辆系统的运动学,前轮的速度与运动学模型和MP问题无关。此外,对于前转向车辆,后轮总是与汽车方向对齐。因此,选择车头方向的车速作为控制输入比选择前轮速度更好。前轮速度的另一个因素允许车辆以上界曲率1为参考点定向。以上的讨论可以简化如下:

其中u1=vcosφ成为新的速度输入。注意,通过考虑由机械结构决定的系统动力学,我们总是可以从输入u1(t)和u2(t)转移到真正的加速器和方向盘输入。在运动学方面,系统(3)就是类车机器人的运动学模型。参考经典研究结果,非完整系统(3)在前轮转向角物理上为[6]的情况下,仍然是小时间可控的。然而,在这项工作中对于平滑MP问题的讨论,要求速度控制是积极的,因为如果司机需要停止和换到倒挡,就不会有一个平稳的机动。有了这个要求,系统(3)就不再是局部可控的了。
图1 自行车运动学模型
基于系统(3)和相应的输入约束,我们将MP问题描述为寻找一种开环转向方法,通过连续控制将车辆状态从初始配置X0精确或近似地转向目标X1。利用正弦曲线的良好特性,我们可以解决正速度约束并获得平稳机动。首先,我们引入系统(3)的链式形式如下:
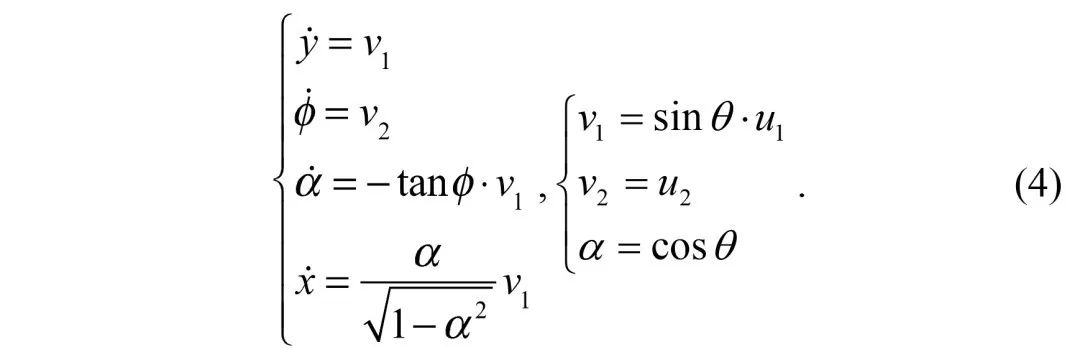
我们应该注意到,最后一个方程是基于这样的假设:在计划过程中sin(θ)>0,状态θ位于区间[0,π]内。当sin(θ)=0时,

是隐式确定的。
2.2侧向运动的一步的非完整过程
在介绍一步过程之前,我们首先介绍了基于正弦信号输入的多级转向过程的一些经典结果。标准双链系统是一个双输入系统,如下所示




编辑推荐




最新资讯
-
每秒采集100万个数据 | 下一代USB DAQ产品-
2025-04-07 14:12
-
重型商用车辆和客车的动力学——振动环境
2025-04-07 14:11
-
2025年10大隐形车衣品牌排行榜
2025-04-07 10:40
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
