




 广告
广告





















































基于 V2X 的混合动力汽车分层能量管理及优化

混合动力汽车的能量管理控制系统是一个非线性、多变量、时变、不可微的系统,是当前混合动力汽车领域研究的热点和难点,直接影响混合动力汽车的动力性、经济性、舒适性及排放性能。
基于规则的控制方法已经实现产业化应用,而基于优化的控制方法主要停留在理论研究阶段。为了得到理论上的最优解,一些学者将模型预测(model predictive control,MPC)和动态规划(dynamic programming,DP)结合起来。考虑到计算的时间成本问题,又有学者研究了可以获得近似最优解的等效燃油消耗最小原理(equivalent consumption minimization strategy,ECMS)或庞特亚金最小值原理(Pontryagin’s minimum strategy, PMP)。然而,MPC 和 DP 的组合算法、ECMS、PMP或这些算法的改进方法,以及一些其它的基于优化的控制算法,始终无法实现实时控制。而且,在使用这些方法求解的过程中,被控对象模型一般被不同程度的简化,比如忽略了驾驶员的驾驶意图、实际道路情况、信号灯的影响以及车与车之间的相互影响等,所得到的最优解并不是真正意义上的最优解。
随着智能交通系统的不断发展,采用车联网技术解决混合动力汽车的实时优化控制成为学者们关注的焦点。为此,本文提出一种基于V2X(vehicle to vehicle,车车通信,以及vehicle to infrastructure,车与交通设施通信,后统称为车联网)的方法,从智能交通(intelligent traffic system,ITS)的角度,为解决混合动力汽车的实时能量管理及优化的问题提供新的思路。
目前,分层控制的思想已经较为成熟,可以用于描述复杂控制系统的逻辑结构。本文设计一种分层控制器,上层控制器是车联网控制层,用于求解最优目标车速。下层控制器是能量管理控制层,根据上层控制器的最优目标车速,得到发动机、电机的最优输出功率。
一
基于 V2X的分层控制原理
本文采用的V2X 通信原理如图1所示。
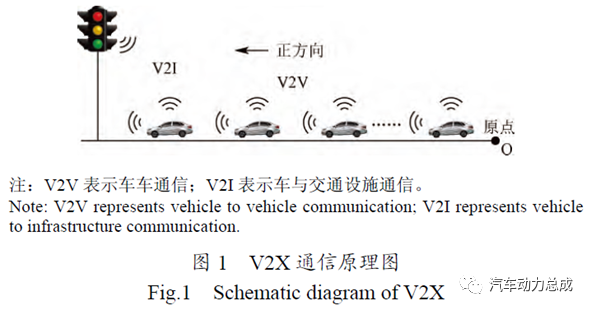
在车联网环境下,汽车可以通过专用短距离通信(dedicated short range communication,DSRC)、射频识别(radio frequency identification devices,RFID)、蓝牙(Bluetooth)、Zig Bee、Wi-Fi或蜂窝网(cellular network)实现车车通信以及车与交通设施通信。为了方便计算,假设一条车道上有多辆同型号的混合动力汽车,每辆车都配有通信装置,都可以接收一定距离内来自前车、后车、交通信号灯以及其它信号发送装置的信号。
分层控制原理图如图2 所示。
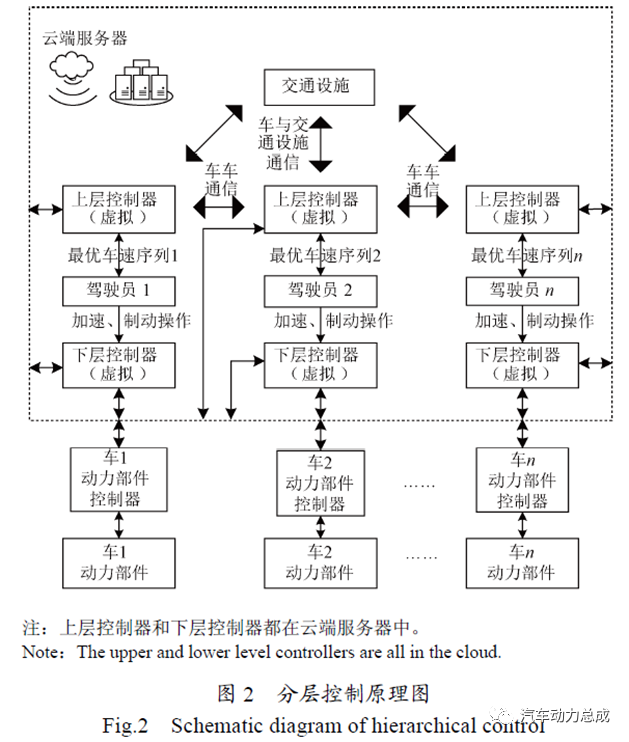
本文设计的分层控制系统中,上层控制器集成模型预测算法和多目标优化算法,用于求解最优目标车速。其根据基于V2X 采集到的信息,进行最优目标车速计算并将计算好的信息通过无线传输的形式反馈给每辆车的驾驶员,驾驶员根据最优目标车速进行加速或制动。同时,车载无线通信装置将加速和制动踏板传感器采集到的信号反馈给云端服务器。
下层控制器集成能量管理优化算法,当其接收到驾驶员请求转矩或功率信息(加速和制动踏板开度及其变化率)之后,通过最优控制算法求解当前时刻发动机、电机的最优转矩或功率以及变速箱速比等。最后将最优控制指令通过无线传输发送给发动机控制器、电机控制器、变速箱控制器以及动力电池控制器等。各动力部件控制器根据接收到的控制指令控制对应的动力部件执行相关的输出操作,并将动力部件的实际输出反馈给下层控制器进行闭环修正。
车联网的出现,为解决混合动力汽车的实时优化控制提供了可能性。其关键原因在于,基于车联网的上层控制器和下层控制器均可以是外界的大型服务器或基于服务器的云计算,而大型服务器或云计算的运算能力远远高于车载的单片机控制器,所以计算的时间成本较低。
二
上层控制器的数学描述
本文所设计的分层控制器分为两层,为了实现控制器的功能,首先建立被控对象的数学模型。本文的研究对象中,上层控制器数学模型包含被控对象的动力学方程、功率平衡方程以及目标车速优化模型,其目标是在避免汽车遇到红灯以提高其燃油经济性的前提下求解最优目标车速。
在汽车队列中,任意一辆车的纵向动力学模型如式(1)-(3)所示。
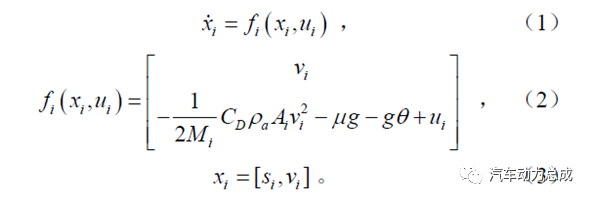
式中 xi 为第 i 辆车的状态向量;si 为第 i 辆车的位置,用坐标表述;vi 为第 i 辆车的速度,m/s;ui 为第i 辆车的控制变量,含义为任意时刻单位质量牵引力或制动力,N/kg;Mi第 i 辆车的质量,kg;CD为控制阻力系数;ρa为空气密度,kg/m3;Ai为第 i 辆车的迎风面积,m2;μ为滚动阻力系数;θ 为坡度,(°)。假设 θ 很小,令 cosθ为 1,sinθ 为θ, g 为重力加速度,m/s2。
汽车的驱动功率平衡方程如式(4)所示。

式中 Pireq 为驱动需求功率,W。
假设一条车道上的汽车数量为 n,那么一段时间内 n辆车单位距离上消耗的总能量的最小值求解问题可以用式(5)表示,式中的控制变量是单位质量牵引力或制动力ui。
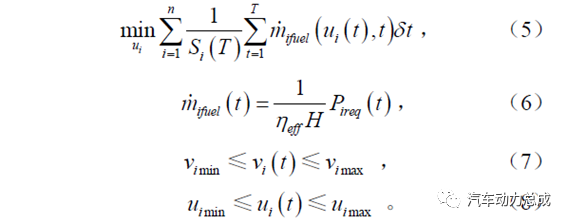
式中m~ifuel为混合动力汽车的等效燃油消耗率,g/s;H 为汽油的热值,J/g ;T 为汽车行驶的时间,s;Si(T)为 T 时间段内第 i 辆车行驶的距离,m;δt 为计算步长,s;vimin、vimax分别为汽车行驶速度的最小和最大值,m/s;uimin、uimax 分别为控制变量的最小和最大值,N/kg。
在获取最优目标车速之前,需要设定最优目标车速的初始值。本文基于交通信 号灯正时(signal phase and timing,SPAT),提出一种目标车速初始值的计算公式,如式(9)所示。
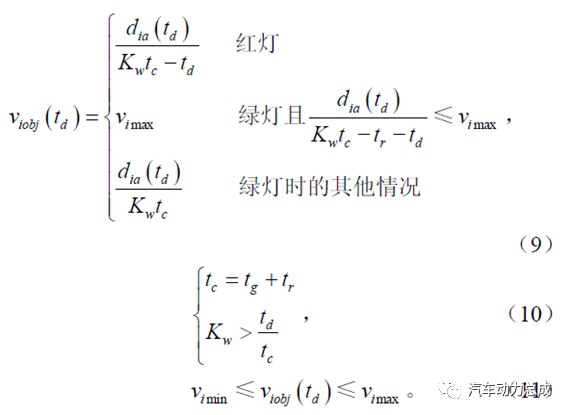
式中 viobj 为第i 辆车的目标车速,m/s;dia(td)为第 i 辆车的位置 si 与交通信号灯 a 的距离,m;Kw为信号灯的循环次数,取整数;tg、tr分别为绿灯和红灯的持续时间,s;tc为一个红绿灯周期的时间,s;td 为汽车行驶的时间,s。
由式(9)可知,当信号灯为绿灯时,若汽车目标车速初始值满足设定的约束条件,其目标车速的初始值选择为最大的允许值。若不满足此约束就意味着汽车需要在此绿灯时间段内超速才能通过。在这种情况下,则从实际的角度出发,设定汽车减速,在行驶的过程中经过一个红灯时间窗口,并在下一个绿灯时间窗口通过。由于目标车速设定有上限值和下限值,如果在接下来的绿灯时间窗口内,目标车速无可行解,则车辆必须在给定的红灯时间窗口内停车,等到下一个绿灯重新按照式(9)计算目标车速的初始值。
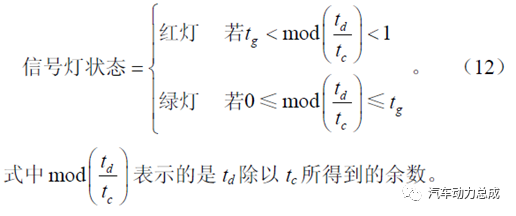
为了提高汽车经过信号灯时遇到绿灯的可能性,本文从交通信号灯正时的角度,设定绿灯的间隔时间小于原先的绿灯间隔时间。红绿灯的选择时机计算公式如式(12)所示。
三
最优目标车速的求解
汽车目标车速的求解是一个多目标优化的问题,求解目标车速时,需要考虑汽车的油耗、车速跟随、控制变量、车与车之间的相对距离等,故本文将目标函数选取为4者的加权值之和。对于每辆车以及有限的时间段T,汽车在行驶时间 td 时的最优目标车速求解问题可以用式(13)表示,该式的输出量为当前时刻汽车的目标车速及其位置,即汽车的状态变量。
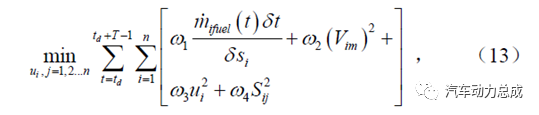
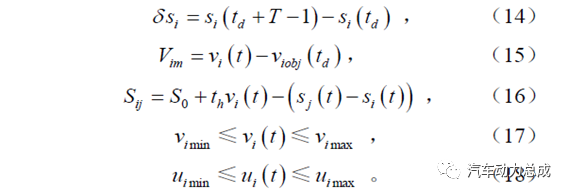
式中 Vim 为第i 辆车当前车速与目标车速的差值,m/s;Sij为第 i 辆车和第 j 辆车的距离,m;δsi为时间段 T 内第 i辆车的行驶距离,m;si(t)和sj(t)分别为第 i 辆车和第j 辆车在时间 t 时的位置,用坐标表示;th为预先设定的前后两车的间隔时间,s;S0 为预先设定的安全距离,m。ωi (i=1,2,3,4)为权值系数。
式(13)为优化的主目标函数,优化的对象包含四个方面的权值之和,即第 i 辆车单位距离油耗、第 i 辆车车速与目标车速的差值、控制变量(单位质量牵引力或制动力,更直接的因素为加速踏板开度或制动踏板开度)、第 i 辆车与第 j 辆车之间的距离。关于权值ωi(i=1,2,3,4)的选取,需要遵循以下原则。
选取权值 ω1 和 ω2 为目标车速范围的函数。当目标车速范围较大时,更多地关注燃油经济性而不是车速跟随,此时,ω1 取较大值而ω2 取较小值;当目标车速范围较小时,更多地关注车速跟随而不是燃油经济性,此时,ω1取较小值而 ω2取较大值。选取 ω4 为前后车相对距离的函数,当相对距离增加时,ω4 取较小值,当相对距离减小时,ω4 取较大值。本文选取控制变量的权值 ω3为常数。
根据上述原则,目标车速的范围有两方面的作用,其一是作为权值函数决定 ω1 和 ω2 的取值,其二是如果汽车的实际车速与最优目标车速相差太大,最优目标车速范围可以保证汽车车速在限定的范围之内并且避免遇到红灯停车。
另外,上述优化问题除了满足式(14)-(18)的约束之外,还应满足式(1)所述的系统动力学方程的约束。需要指出的是,最优目标车速与通过交通信号灯正时得到的目标车速初始值的本质不同之处在于,后者的求解原则是避免汽车等红灯停车,没有考虑发动机的工作点,而式(13)所述的优化问题则权衡了汽车的燃油经济性、车速跟随以及跟车距离等。
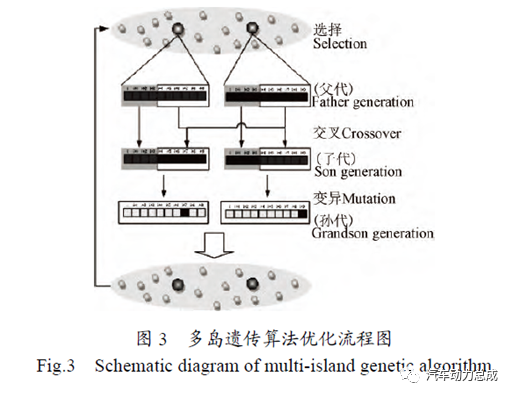
关于式(13)所示的典型的多目标优化问题,常用的求解方法有动态规划、序列二次规划、遗传算法、粒子群算法、蚁群算法、模拟退火算法、近似模型或其它组合优化算法等。本文选取多岛遗传算法进行求解。
多岛遗传(multi-island genetic algorithm,MIGA)算法的本质是在传统遗传算法的基础上计算群体的适应度值后将选择、交叉和变异分别在每个岛上进行,每个岛上定期会有一些群体按照给定的概率迁移到其他岛上,然后继续进行传统的选择、交叉和变异操作,如果满足条件则输出最优解,不满足则继续在多个岛上分别进行传统的遗传算法操作[21]。其优化流程如图3 所示。
本文设定多岛遗传算法总群体规模为 300,岛数为30,总的进化代数为150,岛间迁移率为 0.4,迁移的间隔代数为 5,交叉率为 0.95,变异率为0.05。
由多岛遗传算法优化之后,可以得到车辆当前时刻的目标车速及其位置。假设每辆车在每隔一段时间 T 都发送该车的位置和目标车速信息到紧随其后的一辆车,那么当汽车的目标车速序列以及前车位置信息都确定,最优目标车速轨迹可以通过模型预测得到。由于混合动力系统是一个高度非线性的系统,所以本文选取非线性模型预测算法预测有限时间窗口内的最优车速序列,其理论部分不作赘述。
在车联网概念出现之前,一般采用吉普斯跟车模型(Gipp’s car following model)求解最优目标车速。在吉普斯跟车模型中,不考虑交通信号灯的影响,其主要原理是在防止汽车碰撞的前提下,获得最优目标车速。本文将基于吉普斯跟车模型的方法用作对比方法,吉普斯跟车模型的理论公式如式(19)所示。

四
下层控制器的数学描述
下层控制器主要是等效燃油消耗最小的优化模型,其目标是根据上层控制器得到的最优目标车速,计算每个采样时刻发动机和电机的最优功率分配。由于动态规划、随机动态规划等算法计算时间很长,本文下层控制器采用的控制算法为自适应等效燃油消耗最小原理(adaptive equivalent consumption minimization strategy,A-ECMS)。ECMS 是Gino Paganelli 基于启发式经验而提出并用于并联混合动力汽车优化控制的方法。在介绍 ECMS原理之前,先介绍庞特亚金最小值原理(Pontryagin’s minimum strategy,PMP)。
PMP的优化问题可以用式(20)所示的汉密尔顿(Hamilton)方程表示。
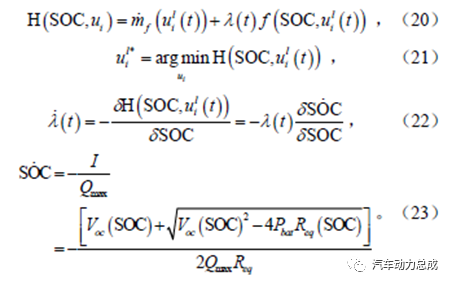
式中 uil(t)是 t 时刻下层优化模型的控制变量;λ(t)是 t 时刻系统的协状态;SOC(state of charge)为动力电池的荷电状态;Voc 为动力电池的开路电压,V;Pbat 为动力电池功率,W;Req 为动力电池等效电阻,Ω;I 为动力电池电流,A;Qmax 为动力电池的最大容量,A·h;uil*(t)为最优控制变量,最优控制变量是当汉密尔顿函数取最小值时的控制变量的取值。
本文研究的是一款非插电式混合动力汽车,动力电池 SOC 变化范围较小,可以近似认为其电压和内阻特性不随 SOC 而变化,因而可以将 ECMS 近似等同为 PMP,ECMS 的等效因子,近似等同为 PMP 的协状态。然而,由于混合动力系统的不连续性,PMP 协状态的最优轨迹方程没有显式解。所以PMP 的Hamilton 方程只是最优控制的必要条件,理论上无法解决混合动力汽车的最优能量管理问题。而 ECMS 的等效因子是一种近似的可以实现在线估计的协状态,能够解决混合动力系统的优化控制问题。
由于 ECMS 和 PMP 的相似性,根据Hamilton 方程,可以用式(24)描述基于 ECMS 的优化问题。
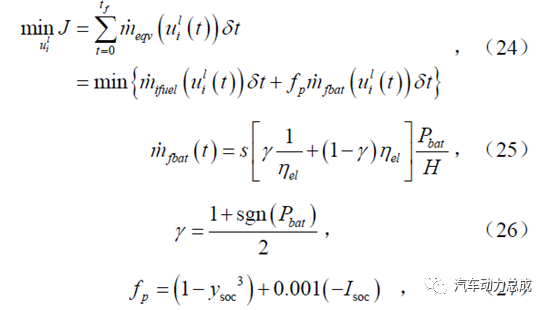
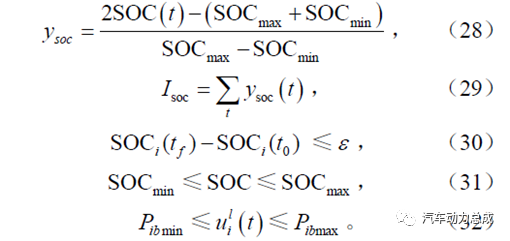
式中meqv 为等效燃油消耗率,g/s;fp为惩罚函数;mfbat 为电池的等效燃油消耗率,g/s;s 为等效因子;γ 为单位阶跃函数;ηel 为电能传递路径的等效效率;ySOC 为标准化的 SOC;ISOC 为 SOC 的标准用量。SOCmin 和 SOCmax 分别为 SOC 的最小和最大值;SOCi(tf)和 SOCi(t0)分别为第i 辆车在最终时刻 tf 和初始时刻的 t0 时的 SOC;ε 为设定的绝对值足够小的一个实数;Pibmin 和 Pibmax 分别为第 i辆车动力电池的最小功率和最大功率,W。
等效因子对工况很敏感,故有必要设计一个可变的等效因子,满足不同工况的需求。当等效燃油消耗最小原理的等效因子 s 可变时,其实质则变为自适应等效燃油消耗最小原理。等效因子的计算,可以使用很多优化算法,如滑模控制、鲁棒控制等。这些优化算法不是本文的研究重点,故仅采用一个简单的线性迭代表达式,如式(33)所示。

式中 cp 为迭代步长,s。
五
硬件在环仿真结果及分析
5.1 硬件在环仿真设置
由于车联网涉及到宏观交通领域的实时数据处理与反馈的问题,数学模型比较复杂且内含复杂的优化算法,一般的服务器运算速度缓慢,无法满足实时控制的需求。为此,关于车联网部分,本文采用美国克莱姆森大学的大型服务器 Palmetto(本文仿真采用的计算模块为惠普的DL580,处理器为 24 核英特尔至强 7542,运行内存128 GB)来计算上层控制器的最优目标车速,并将优化后的车速保存为数据格式文件,用于下层控制器的离线硬件在环仿真,硬件在环仿真环境为 dSPACE,仿真时间为300 s。
在测试程序中,设置车队中有4 辆混合动力车;1 号车到 4 号车的初始位置为 45.5666、30.2293、15.9196、 0.8724 m,规定汽车行驶方向为正方向,位置坐标原点在汽车行驶方向的反方向(如图1 所示);初始车速为13.0047、14.1788、10.3730、10.0473m/s;模型预测的时间窗口为 10 s,计算的步长为 0.5 s;设置信号灯数量为15,红灯持续时间为45 s,绿灯持续时间为 25 s,两个交通信号灯的距离为400 m;设置汽车的最大、最小车速分别为20 m/s 和0。设置每辆车的整车整备质量为1500 kg,迎风面积为2.25 m2,空气阻力系数为0.3,发动机功率为93 kW,电机的额定功率为 30 kW,峰值功率为 60 kW;设置初始等效因子为2.4。
5.2 硬件在环仿真结果
本文研究的是基于车联网的混合动力汽车的分层能量管理,上层控制器的目标为输出最优目标车速,下层控制器的目标为最优能量管理。为了验证本文控制器的控制效果,仿真结果分别从图 4~7 以及表 1~2 所示的几个方面进行论述。
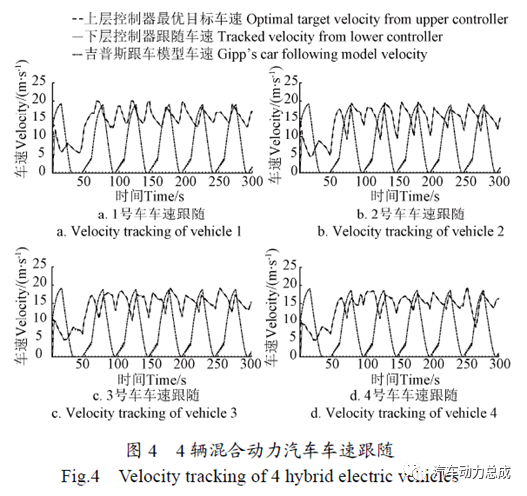
图 4a~4d 分别为1 号车到4 号车的上层控制器最优目标车速、下层控制器的跟随车速以及吉普斯模型目标车速。分析可知,除了起步时误差比较明显之外,其余时间的跟随车速与最优目标车速基本吻合,下层控制器能够很好的跟随上层控制器的最优目标车速,说明下层控制器的能量管理控制方法是有效的、合理的。相比于吉普斯跟车模型得到的车速而言,本文提出的方法得到的最优目标车速明显没有出现大范围的加速或减速,有效地避免了混合动力汽车停车。基于本文提出的方法得到的 4 辆车的平均车速为 14.6323、14.3377、14.2729、 14.1014 m/s,而吉普斯模型得到的四辆车平均车速均为7.8504、7.5327、7.4699、7.1568 m/s,从而说明了本文提出的方法可以使得混合动力汽车在固定的时间段内行驶较远的距离。另外,4 辆车的目标车速的变化趋势以及跟随车速的变化趋势都基本保持一致,说明了每辆车与前、后车之间以及车辆与交通信号灯之间可以实现良好的通信,使得各车的相对距离大体保持不变,因而也可以体现出上层控制器能够有效的避免车与车之间发生碰撞。各车在经过红绿灯时都会进行相应的加速或减速且各自车速均未超过限速,说明交通信号灯对驾驶员驾驶行为有影响,但是驾驶员根据建议车速行驶,不会超速也不会过多踩刹车从而减少燃油消耗。
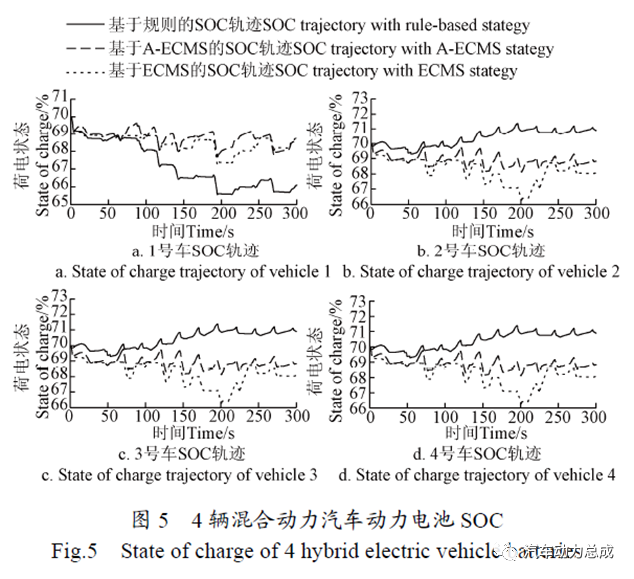
为验证下层控制控制器控制效果,本文引入基于规则的控制方法为对比方法,其原理为,当控制变量满足特定的条件时,执行相应的工作模式。本文基于规则的控制方法选取的控制变量为发动机转速、发动机转矩、电机转矩以及动力电池 SOC。图 5a~5d 分别为1 号车到4 号车的动力电池SOC 在基于规则、基于A-ECMS、基于 ECMS 3 种不同策略下的变化轨迹。由图可知,不管下层控制器采用哪种控制策略,动力电池的 SOC 都在合理的范围内变动,从而再次验证了下层控制方法的合理性。整体而言,基于A-ECMS的控制方法动力电池SOC变化范围最小,基于 ECMS 控制方法动力电池 SOC 变化范围略大于基于 A-ECMS 控制方法时的 SOC 变化范围,基于规则的 SOC 变化范围最大。由此说明,采用变等效因子的 A-ECMS 控制方法能够更好的适应工况的变化, ECMS 采用固定的等效因子,控制效果次之,但优于基于规则的控制方法。另外,2、3、4 号车的 SOC 变化趋势保持一致,但均与 1 号车的变化趋势不同,原因是一号车是领队车,2、3、4 号车是跟随车,领队车的车速与其他车辆无关,只取决于它与交通信号灯的距离以及交通信号灯正时,处于主动加速或减速的地位,而跟随车的车速信息除了与交通信号灯有关之外,还被动的受控于前面车辆的实际跟随车速。由于领队车与跟随车的车速上的差别,而汽车的型号及动力电池初始 SOC 均相同,经过能量管理控制策略的仿真,得到动力电池 SOC 的变化趋势也是领队车与跟随车不同,而跟随车动电池 SOC的变化趋势大致相同。
由于 4 辆车的工作情况基本保持一致,故本文将其中的第 2 辆车基于 A-ECMS 和基于规则的下层控制方法得到的结果进行对比。图6a~6b 分别为发动机和电机在基于 A-ECMS 和基于规则的控制方法下的输出功率。此图主要用于对比动力部件在不同控制方法下的输出功率以及动力部件工作情况的合理性。由图6a 可知,基于规则的控制方法下,发动机工作的时间比较多,而基于A-ECMS 的控制方法时发动机的工作时间大大减少。类似地,由图6b 可知,在基于规则的控制方法下,电机的工作时间比较少,而基于 A-ECMS 的控制方法时,电机的工作时间大大增多。由此可知,基于 A-ECMS 的控制方法是优先使用电机驱动然后使用发动机驱动,从而其燃油经济性比基于规则的控制算法高。

图 7 为 4 辆混合动力车的轨迹曲线,其中,与横轴平行的实横线表示红灯窗口,实横线之间的空白表示绿灯窗口。由图7 可知,4 辆车在经过红绿灯时,均没有遇到红灯,从而验证了本文提出的信号灯正时方法可以有效的减少甚至避免汽车遇到红灯,满足本文上层控制器的设计原则。
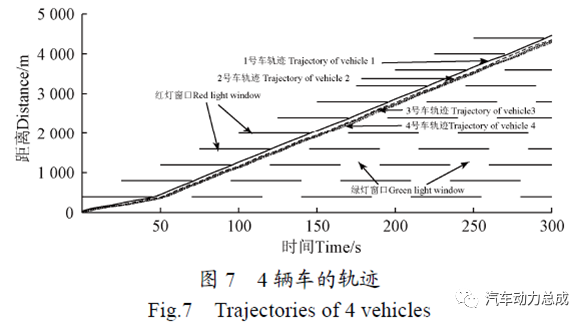
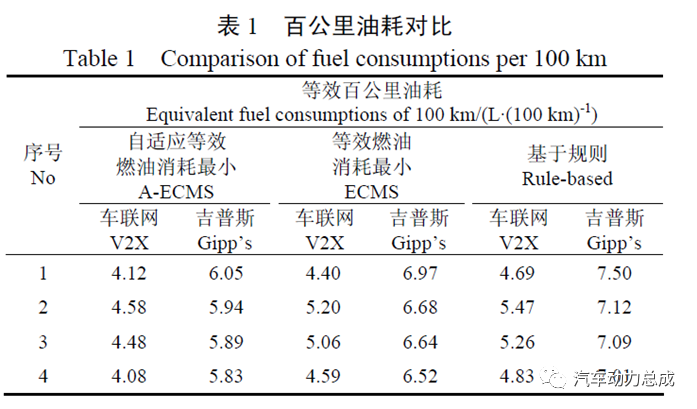
表 1 从等效百公里油耗的角度表示不同控制算法的控制效果。该表为本文提出的基于V2X 以及基于Gipp’s 跟车模型的汽车最优目标车速计算方法求解时的混合动力汽车等效百公里油耗。分析表 1 可知,对于同一辆混合动力汽车,基于规则、ECMS、A-ECMS 的混合动力汽车的油耗是依次降低的,相比于基于 ECMS 和基于规则的控制算法,基于 A-ECMS 时,4 辆车的平均油耗依次降低 10.3%, 14.8%。在相同的控制方法下,上层控制器采用 V2X时的等效百公里油耗低于采用 Gipp’s 跟车模型时的等效百公里油耗,下层控制器为A-ECMS、ECMS、基于规则时,油耗的平均降低幅度依次为 27.2%,28.2%,29.5%。由此验证了本文的上层控制器的合理性及优越性。



编辑推荐




最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
