




 广告
广告





















































变化侧风下的自适应尾部襟翼

摘要
行驶中的车辆通常面临有风环境。结合常见的风的分布情况与车速,在气动性能研究中可以对车施加一个的分布在6°以下基本均匀,在14°以下基本一致的横摆角β。降阻措施通常是在无侧风场景下设计的,最小阻力也是在这种情况下才会出现。本研究通过经典船尾自适应系统提升了气动减阻效果。
实验设置如下:将两个襟翼分别以与车身成θ1,θ2两个角度安装于Ahmed后部侧沿。为评估不同襟翼位置的侧风减阻效果,在风洞洞中以Re=1+e5数量级在横摆角β=0°,3°,6°,9°有无襟翼情况下分别进行了测量。经测试,襟翼尺寸δ为车身宽度的9%和13% 。得到了每种β和δ下阻力随襟翼角度的映射图。
最小阻力并非出现在襟翼对称偏角位置,即θ1=θ2时。这种情况具有静态定位的特点,对正β和负β同样有效。用于比较的襟翼定位策略是在每个β处最小化阻力的静态对称形式和在每个β处提供最小阻力的自适应形式。除β = 0°外,自适应策略比静态对称襟翼偏角的降阻效果更好。
另外,静态策略不能在每种β下优化对称襟翼偏角。每种形式的随真实β分布的加权平均阻力时,自适应方案比静态最佳位置高出40%到70%的降阻效果,具体取决于每种横摆分布下的襟翼长度。
简介
由于法规等原因限制,大量车辆通常由于具有钝体尾部而在气动性能方面表现不佳,长时间驾驶会导致发动机15%的能量消耗。出于经济与环境原因,提升车辆能源利用效率十分重要。使用船尾可以降低气动阻力,但由于法规限制,安全问题以及实际操作可行性困难的原因没有得到广泛应用。当今的扁形船尾或者基面襟翼可以在不需要的时候折叠起来,降低使用成本并且增加的可行性。一篇全尺寸拖车的研究明上述方法可以减少车辆5%的阻力系数。基面襟翼的使用往往是静态的而不适应变化的环境非对称情况。环境非对称包括安和稳态车辆流场的失准,这就需要进行气动降阻的非对称优化。环境非对称的源包括很多,其中最广泛的是汽车运行非对称(例如开窗,不同的载荷条件等)和天气环境等(如侧风或者大气边层的变化)。
车辆通常在有风环境下行驶,需要得到真实的气动性能测量结果。如图1中的在Heathrow地面高度10m处的风速概率密度函数。英国,欧洲,美国的其他区域的分布非常相似,这对于通用的相关性的研究足够,因为准确值的意义不大。基于图1(a)的分布并认为其均匀分布在所有方向,图1(b)展示了车辆在60,70pmh速度下行驶的横摆角β的概率密度分布。虽然风不是轴对称的,但是风的角度范围增加以及道路方向的大致均匀分布使得该假设合理。在所考虑的速度下,β的分布在6°以下基本均匀,在14°以下基本一致。本文研究了β从0°到9°的范围,此范围占据约80%。
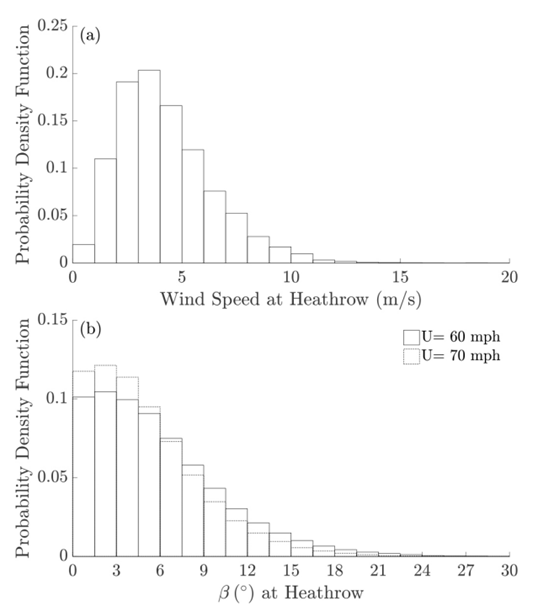
图1 Hearhrow60,70mph车速下风速(a)以及横摆角分布(b)
研究表明侧风对阻力的影响非常明显,小的倾角也会引起很大的阻力增加。另外,所有非对称环境都有利于体现自适应系统对于局部情况的兼容性。本文深入研究了一个自适应系统并且结果表明自适应襟翼系统比静态基面襟翼在变化侧风条件下的减阻效果更好。
仪器和实验步骤
为评估侧风下襟翼在不同位置的效果,使用方背式缩比Ahmed模型在U=35m/s下进行了风洞实验(图2)。基于模型高度H=0.16m,宽度W=0.216m,雷诺数Re数量级为105。W作为特征长度是因为其与尾流动力学相关。模型位于地面上方0.028m来得到正确的地面效应。地面边界层厚度约为0.02m。6分量测力天平ATI Gamma IP68位于气流之外用于测量车身的力和力矩。天平与车身平行,得到的力和力矩是车身坐标系下的。此外设置了64个8*8矩阵式压力测量点,以模型基面为中在0.84W × 0.84H的区域上均匀分布,与ESP-DTC压力传感器相连。
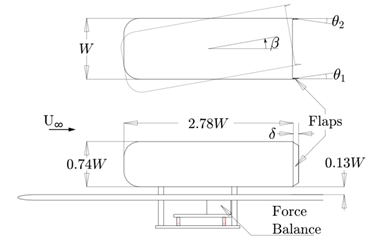
图2 风洞模型(W=0.216m)
模型在β = 0°, 3°, 6° 和9°情况下分别进行了无襟翼(baseline)和有尾部侧向襟翼的实验测量。使用的襟翼尺寸δ,是W的9%和13%。在每种β和δ情况下进行了襟翼角度θ1,θ2的参数研究。最小阻力偏角在8°以内时θ的梯度为2°,此外的梯度为4°。船尾和船舵的角度分别是θB和θR,分别由襟翼偏角的对称和非对称组合,即下式:
车身坐标系下的阻力(D)系数,侧向力(L)系数,每个压力测量点pi的压力系数经过横截面A=WH和动压q=1/2ρ(Ucosβ)2归一化后如下式所示:

其中ρ为空气密度。选择上述车辆坐标系中的动压是因为速度分量平行于车辆运动方向,对尾部车辆的动能耗散有贡献,而垂直于车辆运动的速度分量对风动能的耗散有贡献。基面平均压力系数<Cp>和侧向模态分别如下式定义:
其中li是第i个压力测量的侧向位置。
实验在Imperial College London的封闭式Donald Campbell风洞中进行,风洞测试段尺寸为1.37 m × 1.22 m × 3.00 m。平行于气流方向时的阻塞比为2.1%,β最大值时达到3.0%。来流湍流强度小于0.1%,风洞通过比例-积分-微分控制器实现所需要的来流速度,精度为0.25%。
结果与讨论
最优襟翼位置
图3提供了每个β和δ下Cd随θ1和θ2的映射关系。图中Cd的全局最优值用”×”标出,通常并不是位于对称襟翼情况下,即图中线标出的θ1=θ2情况。所有位置必须满足以下条件:对于正负β的情况下是等效的。对称条件下的最小Cd用“+“标出。增加的β导致最优减阻与对称情况下更大的偏角。在非对称襟翼情况下,外侧襟翼角度θ2增加高达50%,内侧角度θ1下降了100%,一些情况下甚至变为负数。增加襟翼长度δ,有望使得襟翼更加重要。这就导致最小Cd对应更大的对称角度,并且curvature全局最小Cd情况下θ1和θ2有更大的最优值。长襟翼会导致绝对最小值处Cd曲面的曲率即梯度也更大。所以,通过调整长襟翼的偏角能使Cd的更多的下降。
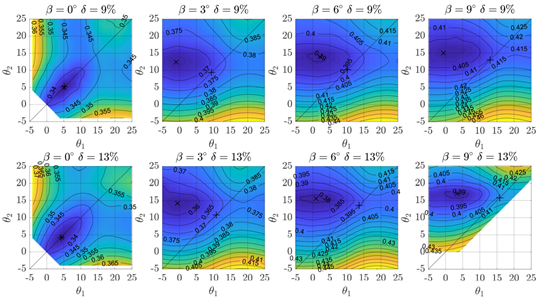
图3 Cd关于θ1θ2变化的函数映射图。“+”表示对称最优,“×”表示绝对最优。
无横摆情况下,最优襟翼的偏角都是对称并且向内的,由纯的船尾组成,与这一点与对称狭窄尾流对应最低阻力的理论一致 。进一步,当偏角θ小于等于15°时,最优位置总是对称的。这表明襟翼引起的不对称不利于阻力。β不为0的情况下,映射图体现出关于θ2=常轴接近对称的性质,这说明不管θ1如何,θ2的最优值对于给定给出的情况是常值。相似的,β不为0且θ2为固定值时,θ1的值接近常数,位于约等于0的位置。
为理解控制最优襟翼角度的因素,例如基面的抽吸力量化压差阻力的负<Cp>及侧向力系数。这一系列条件的数据如图4,绘制了随船头θR及船尾θB角度的变化,可以理解为随着图3中的对角线变化。此处的数据特指β=6°,δ=13%。趋势与β不为零的情况大体一致,可认为是具有代表性的数据。
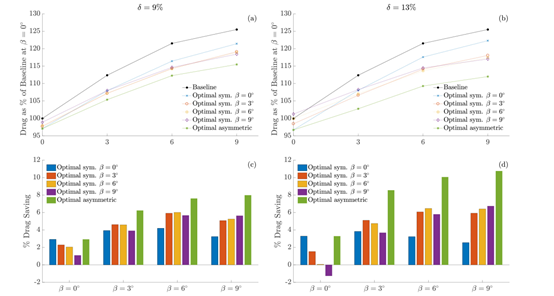
图4 基面抽吸力系数负<Cp>,阻力系数Cd和侧向力系数|CL|,随θR,Θb当另一变量为常数是的变化函数。β=6°,δ=13%情况。
总览这些图,最小Cd和-〈Cp 〉的襟翼偏角位置是不同的:Cd最小的一对角度(θB, θR)大约出现在(8°, 8°)位置,而-〈Cp 〉最小则出现在(0°, 16°)位置附近。这表明即使Cd和-〈Cp 〉的改变整体上有关联,但并不是由完全相同的原因所决定的。因此不只是基面抽吸力,襟翼的力和车辆周围的循环结构都可能影响整车阻力。
图4(a),(b),(b)展示了固定θB时θR变化的情况。每种情况的船头对侧向力Cl有很大的影响,极端情况θB = +16°除外,这可能与流动分离有关,因为襟翼会引起气流偏转。对于一系列的船尾角,沿着一条直线有明显的数据塌陷,表明θR和CL之间的关系有显著的线性关系,基本独立于θB。然而,在每种情况下,数据都有一个角度开始偏离这条线,这可能是由于流在其中一个襟翼上的分离造成的。该偏差发生的点与最小基面抽吸力和阻力的角度相吻合,如图4 (a)和(b)所示。这表明总侧向力和车身所经历的压力阻力之间有很强的联系,与之前使用基面襟翼的实验一致,发现阻力和升力之间有映射关系。在给定θB的情况下,总阻力最小处的θR,几乎与- <Cp>最小处相同,这表明对于固定的船尾,阻力的变化主要受底部吸力的变化影响。
图4(d),(e),(f)描述了θR不变时随θB变化的函数情况。此时的侧向力受到较小的影响,机会为常数,因为襟翼的对称偏转没有提供流动的净侧向偏转。但是在θR最极端情况下Cl也会非如此,基面抽吸力再次与侧向力呈现线性单调关系。Cd和-〈Cp 〉最小时对应的θB也是几乎在同一位置,对应的位置都是θ大于0,即襟翼角度平均结果是向内的。进一步说明了船尾能实现较窄的尾流,减少车身的的压差阻力。同时也与Cd和-〈Cp 〉的差异是由于襟翼自身的力的差异造成这一观点保持一致,因为最小值不一致只有在θB和θR之间的比例非常不平衡的情况下才发生,也就是一个或另一个襟翼延伸到车身宽度以外的情况。
另外,还可以观察通过侧向模ml来量化车身底部压力梯度的统计数据。车身平行风洞情况下,文献中提出ml表现出双稳态特性,说明在特定三维钝体的尾流场中存在双稳态现象。显然,通过ml的变化var(ml)可以发现双稳态现象。图5展示了δ=13%时每种横摆角下-〈Cp 〉随着var(ml)变化的云图。β=0°时,一系列θ小于15°的对称偏角的基面抽吸力小同时方差大,这对应双稳态尾流。对于较大的β值,从最小基面抽吸力的形式到越来越不对称的襟翼形式,再次出现代表双稳态尾流的高var(ml)情况。最大横摆角β=9°时,尽管同样的关系似乎存在于研究区域的边缘,襟翼不足以实现最小的压差阻力,。
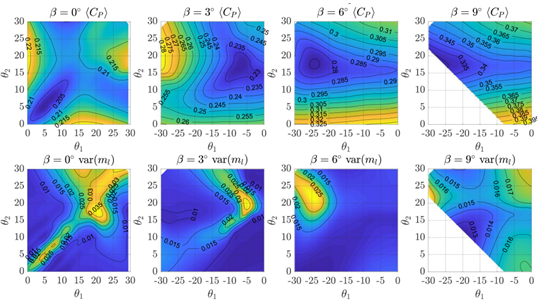
图5 δ=13%时‹Cp ›与var(ml)随θ的变化云图
图6中提供了非对称条件下双稳恢复的最终证据,绘制了侧向模态ml为在几个襟翼位置下不同的偏航角β的概率密度函数。图6 (a)表明当θ1 = θ2= 0°时,只有β = 0°具有双稳行为的双峰特性,其中ml在两个稳定位置之间随机交换。随着β的增加,尾流首先被锁定在一个位置,然后变得越来越多变。图6 (b)展示了当选择θ1和θ2作为最小基面阻力时,双稳行为在β = 0°时保持,在β = 3°时明显恢复,在β = 6°时仍然存在。双稳态行为的难以捉摸的性质加上在远离最小CD的θ1和θ2处使用的网分辨率粗糙,可能导致在β = 6°处双峰的原因不完全清楚。在β = 9°时,双稳态行为无法恢复,如图5所示,角度范围不够宽,无法达到绝对最小的基面阻力。

图6 襟翼偏角对称(a)及基面抽吸力最小(b)情况下ml不同β角的概率密度函数
鉴于最近的许多工作都着眼于双稳态行为对阻力及其对偏航角的高敏感性的影响,我们发现这种行为是在非对称条件下出现的,而且它与最小压力阻力一致,这一点比较有趣。要完全理解这种影响,还需要进一步的研究。
与静态系统的比较
在研究了静态襟翼减阻的机理之后,可以对完全固定的系统和襟翼角度可以不断优化的系统进行一个完整的比较。图7 (a)和(b)显示了在β = 0°时,两种δ下baseline和不同襟翼位置策略的CD占baseline的百分比。在这种情况下,考虑的襟翼定位策略是在每个偏航时最小CD的静态对称形式及在每个偏航时最小CD的非对称形式。正如预期的那样,baseline的CD随着β的增加而增加。每个对称襟翼结构只在特定的β处优化减阻。这种配置在偏航角时所提供的减阻效果会降低,在最极端的情况下,其减阻效果会超过基线阻力。当襟翼长度较长时,阻力对襟翼角度的敏感性较大。图7 (c)和(d)给出了每个襟翼位置相对于每个β处baseline的阻力节省情况。除β = 0°外,非对称定位一致地提供了相对于每个最优对称襟翼偏角的阻力节省。两种策略之间的相对差异被襟翼长度所放大:与最佳对称形式相比,非对称形式在节省阻力方面的最大改进在δ = 9% (β = 9°时)约40%,在δ = 13% (β = 3°时)约70%。
图7 考虑两个δ时定位策略的CD变化。(a)和(b)表示在β = 0°时相对于baseline的CD, (c)和(e)表示在每个β处相对于baseline的增量。(a)和(c)是 δ = 9%的结果。(b)和(d)是δ = 13%的结果
对于给定的偏航角,很明显,非对称襟翼定位有明显的好处,但进一步说,静态策略不能优化每个β的对称襟翼偏转。因此,更公平的比较是使用风平均阻力系数,得到的是每种形式阻力节省的平均值与对应的的β分布加权。表1给出了从图1(b)中提取的用于获得风平均阻力系数的加权值。
表1从图1(b)中提取的用于获得风平均阻力系数的加权值

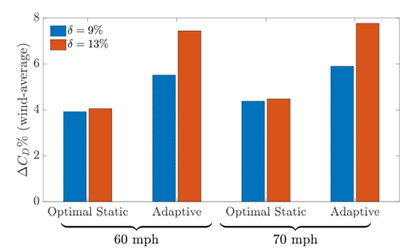
图8给出了在车速为60英里/小时或70英里/小时时考虑的两种襟翼长度的加权平均值。考虑的定位策略是静态对称形式最小化风平均CD,每个偏航下能提供最小CD的自适应非对称配置。自适应解决方案提供了比最佳静态定位节省40%到70%的阻力,取决于δ和所选的特定偏航分布。δ的增加对最佳静态定位所提供的减阻效果几乎没有影响,而当襟翼长度从9%增加到13%,增加44%时,自适应偏角增加的降阻效果提升超过30%。最后值得注意的是,所提供的结果是基于偏航角范围的粗略离散化,仅覆盖典型风分布的80%。更细的离散化和更大的偏航角范围可能会增加静态和自适应策略之间的减阻差异:对称情况下(β = 0°)的总权重将减少,有利于偏航角小于3°和大于9°,两种情况都将受益于襟翼的非对称偏航。
图8 加权平均阻力系数
结论
在一定的偏航角范围内,已经证明存在一个位于简化车辆几何形状尾部的横向襟翼的最佳定位。最佳襟翼位置是那些平衡低侧向力对车辆通过船尾增加的基础压力,同时也尽量减少阻力对襟翼。这需要以一种不对称的方式操纵襟翼以减少侧向力,并向尾部向内收缩襟翼以产生更窄的尾流。一般而言,在气流开始从一个襟翼上分离的角度舵效应会饱。此外,必须在最小化基面阻力和襟翼本身的阻力之间做出权衡,因为基面阻力和车身阻力的最佳襟翼偏转并不总是一致的。
对最小阻力的要求意味着对于非零偏航角襟翼的最佳定位必须是非对称的,因此不能用静态系统来实现。通过对典型风分布施加的偏航角进行平均,结果表明,自适应变偏航角的系统比使用相同长度表面襟翼的优化静态系统的性能好70%。只要有适当的实时算法,自适应系统就有望在现有静态船尾的基础上有所改进,而且对物理尺寸没有额外的要求。基于对导致阻力最小的条件的理解,该算法的开发将是未来工作的主题。
文章来源:Garcia de la Cruz, J., Brackston, R., and Morrison, J., "Adaptive base-Flaps Under Variable Cross-Wind," SAE Technical Paper 2017-01-7000, 2017, doi:10.4271/2017-01-7000







最新资讯
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
-
一文带你了解滤波器
2025-04-28 08:35
