




 广告
广告





















































交叉路口碰撞预警

( 1 ) 系统架构交叉路口碰撞预警应用包括路侧子系统和车载子系统,路侧子系统包括路侧子系统感知单元和RSU; 车载子系统包括车载通信单元、人机交互单元,额外还可具备自动驾驶/驾驶辅助控制单元。
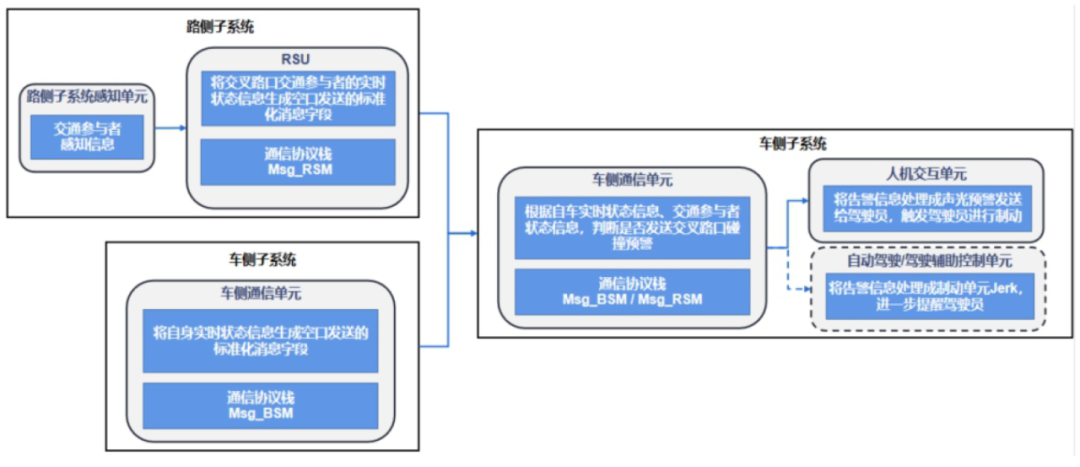
来源:中国信息通信研究院,德国汽车工业协会图7 交叉路口碰撞预警系统架构
( 2 ) 工作原理和信息流描述
交叉路口碰撞预警应用工作原理及流程如下 :· 车端通信单元将自身实时状态以BSM消息形式周期性广播;RSU从路端感知设备中获取当前交叉路口交通参与者信息,以RSM消息形式周期性广播发送;· 车辆接收到来自RSU(V2I)和其他车辆的消息(V2V),由本车计算单元根据自身及参与车辆的位置、速度及行驶方向进行分析,判断是否发送交叉路口碰撞预警;· 如果需要发送告警信息,则可以将告警信息处理成声光预警通过人机交互模块对驾驶员进行预警;· 如果已启动驾驶辅助功能,则可以将告警信息传递至驾驶辅助模块,支撑下一步制动行为。( 3 ) 应用实现方式交叉路口碰撞预警应用的实现,应在车端部署C-V2X车载通信单元并具备预警展示单元,预警单元应集成于车载终端设备或者在仪表、车机载体上;应在路侧部署RSU和路侧感知单元。
远车通信单元会将其BSM消息发送给车侧子系统,同时路侧子系统中的RSU会将感知到的交通参与者信息通过RSM消息发送给车侧子系统,此时车侧通信单元会将接收到的RSM和BSM消息转换为车内网络需要的通信信息发送给自动驾驶或者驾驶辅助控制单元,自动驾驶或者驾驶辅助控制单元会根据自车的动态信息(包括自车的行驶轨迹、车速等)与目标的动态信息进行结合。当有潜在碰撞风险时,若本车具备驾驶辅助功能,当驾驶辅助功能关闭时,可以将此风险告知预警展示单元,通过动画或者语音播报的方式进行提示或者报警。也可将此风险形成制动单元—个较大的减速度梯度让驾驶员有明显提醒感受,从而实现交叉路口碰撞预警报警后的反馈;在驾驶辅助功能开启时,可通过控制车辆调整速度实现交叉路口碰撞预警报警后的反馈.( 4 ) 技术指标要求

注:企业从实际量产的定位需求出发,结合用户驾驶体验等因素,建议在一阶段标准定位精度≤1.5m 的基础上,将指标进一步细化为如果要判断两车横向相关性的准确性达到95%以上,自车定位精度需要达到 ≤0.5m (1sigma) ,目标车辆定位精度达到≤0.5m (1sigma) 。
- 下一篇:弱势交通参与者碰撞预警
- 上一篇:C-V2X量产应用实现路径



编辑推荐




最新资讯
-
2025智驾“封神榜”测评|小鹏MONA M03智车
2025-04-29 18:24
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
