




 广告
广告





















































虚拟试车场场景模型介绍

随着汽车产业的发展,汽车的动态特性(如整车动态干涉、干涉异响、车辆加速性等)越来越受到消费者的关注。对于动态特性而言,各大主机厂的开发主要是依靠设计阶段静态工况设计和样车出来之后的路试验证,与真实场景的关联未可知,往往早期未能全面识别动态特性问题。
对于这种情形,可以通过集成数字路面及环境建模结合建立虚拟试车场场景模型,通过搭载高精度车辆动力学模型在真实的试验环境中仿真,实现在开发早期的车辆动态性能试验虚拟化,快速地针对各项性能进行虚拟评价及设计优化。
虚拟试车场场景模型主要包含特征路面模型以及真实环境两大部分,下面将针对路面及环境建模进行具体介绍。
一、特征路面模型
1.1、搭建路基
在虚拟路面技术运用阶段,我们已经成功将特征路面数字化,使用虚拟的整车模型去分析车辆的受力状态,来模拟物理试验的过程。如何将之前采集到的这么多精度高,特征不同的路面(如比利时路,结构路,长坡桥,耐久特征路)连接并显示在一个可视化平台中是面临的一个难题。通过多种方案尝试后,可首先创建完整的试验场路基模型,然后在路基上铺装特征路面,通过中心线引导行驶轨迹的方式来解决。
路基是整车虚拟试车场环境的基础,通过软件将真实试车场路面中心线的三维坐标数据(黄线显示的路径的轨迹坐标)存储下来,通过格式转化导入后搭建整个试车场的初始框架;设定不同试验场景段的车道数、行驶路径,将不同场景段的路面通过交叉路口进行连接,从而实现不同路面模型串联的完整路基。如下图1所示。试验场地基建模流程如下图2所示。
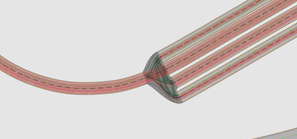
图1 不同车道数汇合连接
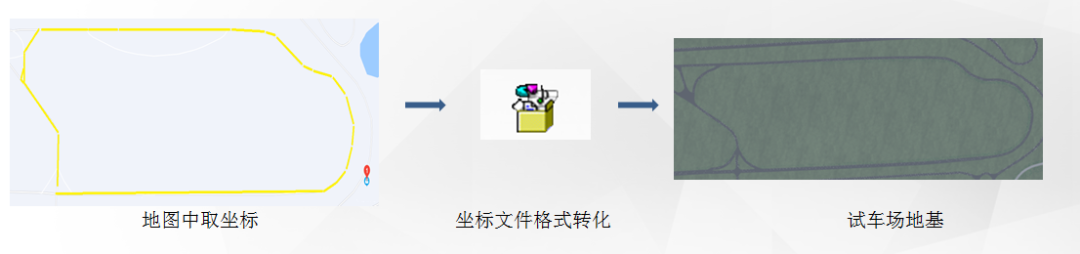
图2 试验场地基建模流程
1.2、特征路面建模
有了初始的试验场场景框架后,对试车场中特征路面进行详细建模,如比利时路面段,由于虚拟路面库中扫描的路面很长,网格很大,路基连接处必须打断后再铺装,因此需要将路面网格进行切割和粗化处理后铺装到原始路基对应位置上;采用matalb软件对路面网格进行切割和粗化,使路面分段嵌入路基。如图3所示。
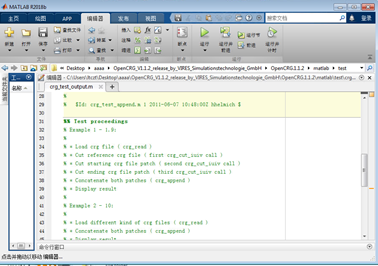
图3 Matlab处理路面
对于方坑以及坡道路面等,通过细化路面特征参数值如坡度、宽度、方坑尺寸等,根据路面参数修改该段路基建立真实坡道以及方坑模型。路面间空隙可通过铺装平路路基过渡将其连接。部分特征路面展示效果如图4所示:

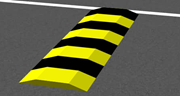
比利时路面 减速坎


桥面 高速环路
图4 特征路面展示
二、环境渲染
环境渲染的目的可以让交通场景显示得更真实。通过软件计算出试验场地势,填充不同地势高度路基间形貌特征,生成crg地势文件。对于软件中生成的不太贴合的地方,导出地势crg文件然后在软件中手动修改细化地势路面网格,优化地势网格文件,使之贴合更真实,如图5所示。
在地面上建立树木、建筑物以及部分交通对象,在路面建立引导线、指示灯、车辆,设置试车场的环境光线,使场景展示效果更加真实。
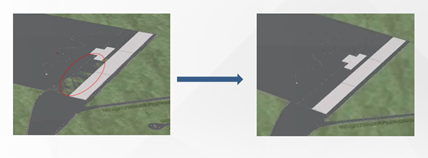
图5 形貌优化后的显示效果
三、场景展示
虚拟试车场场景为车辆的动态特性展示提供了一个环境,为零部件性能提供一个可视化展示空间。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
