




 广告
广告





















































电动汽车扭矩管理计算方法

前言
汽车产业是世界上规模最大、最有价值的产业之一。由于其对国家GDP的增长具有巨大的贡献,因此汽车产业的整体水平也体现了这个国家的经济实力和发展潜力。纯电动汽车的普及已经是大势所趋,其研发将是我国各大汽车厂商的重中之重。发展纯电动汽车需要在3个方面做出重大突破:电机及其控制系统、电池及其管理系统、整车控制器。整车控制策略是协调各个子系统相互工作的关键,其优劣在一定程度上决定了整车的性能。一套完善高效的整车控制策略对整车动力性、乘坐舒适性、使用方便性、经济性和通过性等主要性能有非常大的帮助,能够使得车辆在各种复杂工况下行驶,让纯电动汽车更加满足消费者的诉求。其中扭矩管理是电动汽车行驶基础之一,以下对扭矩管理中计算方法展开介绍。
Part.2
纯电动汽车扭矩管理介绍
整车在正常行驶时,需要根据当前电机转速,油门踏板开度,其他部件的扭矩限制等因素求得整车的当前扭矩。在整车进入Ready状态,当挡位为D挡或R挡,刹车踏板开度为0时,VCU会发送一个扭矩的请求。
1. VCU扭矩的请求值为电机外特性map中当前转速对应的最大扭矩值*油门踏板开度;
2. BMS最大允许放电电流*电压*当前转速对应的电机效率值;
3. MCU当前转速对应的最大扭矩值,三值取最小作为VCU的请求扭矩给MCU。

Part.3
扭矩管理功能划分
扭矩控制是整车控制器的主要功能之一,由于纯电动汽车以车载动力电池作为整车行驶的能源,为了最大限度提高纯电动汽车车载有限能源的利用效率,同时保证驾驶员对动力性的需要,扭矩管理主要有两部分内容,一部分为扭矩解析,另一部分为扭矩限值。
1. 扭矩解析主要包括:
(1)前进挡驾驶员油门踏板解析:根据电子油门幅值与电机实际转速通过查表计算获得前进挡位时的驾驶员扭矩需求百分比解析。
(2)倒挡驾驶员油门踏板解析:根据电子油门幅值与电机实际转速通过查表计算获得倒挡时的驾驶员扭矩需求百分比解析。
(3)前进挡需求扭矩计算:当电子油门踏板信号有效且电机转速信号有效时,前进挡位的扭矩需求解析为:前进挡驾驶员油门踏板解析值*(TMax – TMin)+TMin。否则,前进挡需求扭矩设置为0 N·m。
(4)倒挡需求扭矩计算:当电子油门踏板信号有效且电机转速信号有效时,在满足倒挡限车速需求的前提下,倒挡的扭矩需求解析为:倒挡驾驶员油门踏板解析值*(TMax – TMin)+TMin。否则,倒挡需求扭矩设置为0 N·m。
(5)前进挡位整车最大驱动扭矩TMax计算:在无需对TMax衰减时,整车TqMax使用电机峰值扭矩(使用峰值功率计算后的扭矩也视为峰值扭矩);当电机实际转矩达到峰值扭矩后20s,进入TMax衰减状态,将电机峰值扭矩根据进入衰减状态的时间逐渐衰减并作为整车TMax;进入衰减状态超过20s则应该衰减为峰值扭矩的75%;当电机实际扭矩小于峰值扭矩的75%之后将逐步恢复TMax至峰值扭矩;如果电机实际扭矩低于峰值扭矩的75%超过20s时,则TMax需要完全恢复至峰值扭矩。
(6)扭矩需求仲裁:当位于前进挡时,若有故障跛行请求,则使用跛行扭矩;无故障跛行请求:若在低速巡航状态,使用巡航扭矩计算值,否则使用前进挡扭矩需求计算值;当位于空挡时,扭矩需求置0;位于倒挡时,使用倒挡扭矩需求计算值。
2. 扭矩限值主要包括:
(1)电机报送最大驱动扭矩限值需求
整车控制器发送的电机扭矩指令应受到电机报送的最大允许驱动功率的限制,即按照下述公式计算:

式中,Tmax是最大驱动扭矩;Pmax是电机最大允许功率;n是电机实际转速。
(2)电池最高允许放电电流对于电机驱动扭矩限值需求整车控制器发出的电机扭矩指令不得高于储能系统最高允许放电功率(电池最大允许放电功率与整车高压附件用电功率之差),按照下述公式对应的转矩限值:
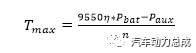
式中,η是电机效率;Pbat是电池最大允许放电功率;Paux是整车高压附件用电功率。
(3)电池包SOC对于驱动电机扭矩的限值。整车控制器发送的电机扭矩指令应保护电池系统SOC不能过低。当电池包SOC高于15%时使用电机峰值扭矩;当电池包SOC低于10%时使用跛行扭矩;当电池SOC位于上述两个限值之间时,扭矩限值应单调变化。电池包SOC对于驱动电机扭矩的限值模型如图3.8所示。
(4)整车超速保护对于驱动电机扭矩的限值。整车控制器发送的电机扭矩指令应保护整车不能超速,此时扭矩限值为:a.当车辆位于D挡位时:电机转速低于D挡转速限值时使用电机峰值扭矩;电机转速高于D挡转速限值时使用零值;若电机转速位于上述两个限值之间时,扭矩限值单调变化。b.当车辆为与R挡位时:电机转速低于R挡转速限值时使用电机峰值扭矩;电机转速高于R挡转速限值时使用零值;电机转速位于上述两个限值之间时,扭矩限值应单调变化。
Part.4
不同运行模式下的扭矩计算
根据整车工况的转换和不同的驾驶需求,纯电动汽车可以分为以下几种不同的运行工况,分别为启动模式、起步模式、巡航模式(运行)模式、制动能量回收模式和跛行模式。其中启动模式即为当要是插入,完成整车控制器、电机控制器和电池管理系统的低压上电检测,若低压无故障,则进行高压上电流程,并发送Ready信号,此时驻刹或刹车踩死,车辆仍处于静止状态,故此时的扭矩计算结果输出为0。
1. 起步-蠕行状态下的扭矩计算
纯电动汽车蠕行功能是指在整车处于Ready 状态后驾驶员完全松开制动踏板并未踩加速踏板时汽车由静止状态平稳加速到一定车速的过程。蠕行功能存在主要有两方面原因:a.蠕行功能能提高整车的驾驶安全性。汽车在坡道起步时,蠕行功能可以有效防止汽车在坡道上溜车现象;倒车时,汽车有一较小的蠕行车速,驾驶员就可以只需把脚放在制动踏板上,从而能有效的防止意外发生。b.当驾驶员从传统的自动挡燃油车过渡到纯电动汽车时,蠕行功能可以更加符合驾驶员的驾驶习惯,防止因驾驶习惯而导致意外发生。
起步时按坡道不同可以分为上坡起步、平路起步及下坡起步。为保证汽车的乘坐舒适性及人员的安全性,上坡起步时,蠕行功能控制电机的输出扭矩应能保证汽车不出现严重的溜车现象;下坡起步时,为避免“窜车”现象的发生,可利用坡道上汽车的重力作用使汽车向前行驶,只需控制驱动电机发出较小的扭矩或者不发出扭矩;平路起步时,蠕行功能控制电机的输出扭矩需平缓,保证输出扭矩的变化值对乘坐人员不会造成明显的冲击感。
设定倒挡时的蠕行目标车速为3km/h,前进挡的蠕行目标车速为5km/h,且当汽车蠕行车速达到蠕行目标车速VCreep_ tar后不再继续增加。

为当下蠕行车速,为目标蠕行车速,为需要增加或减少的车速,为上个计算周期车速。
蠕行的扭矩由两部分组成,分别为初始扭矩和反馈控制扭矩。初始扭矩是根据当前车速与当前蠕行车速的差值查表来得到。该表体现了初始扭矩与当前车速与当前蠕行车速的差值对应的一种关系;反馈控制扭矩是根据当前车速与蠕行目标车速的差来计算汽车蠕行时实时反馈控制扭矩。


2. 加速-基于加速踏板变化时的扭矩计算
在加速踏板驱动扭矩控制模块中,不同挡位状态和驾驶模式下,根据加速踏板开度和当前驱动电机转速计算得到当前整车的需求扭矩,不同挡位或驾驶模式下的输出扭矩是不同的。P挡和N挡下的输出扭矩为0;R挡下的输出扭矩根据加速踏板开度和车速查表计算;挡位在D挡时,制定不同的驱动模式以满足驾驶员驾多样的驾驶风格要求。
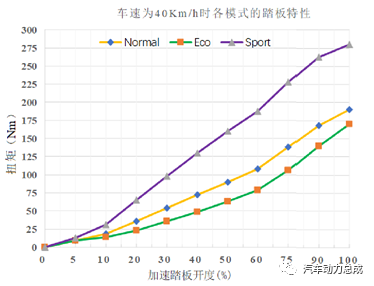
驾驶模式选择是驾驶员主动通过控制模式开关按钮选择不同的驾驶模式来实现,驾驶模式可以分为:一般模式(normal)、运动模式(sport)和经济模式(eco)。一般模式综合考虑车辆动力性跟经济性通过限制电机的最大功率、扭矩变化率、空调输出功率、最高车速等,结合对加速踏板扭矩需求的不同解析方案,平衡车辆动力性和经济性。运动模式主要考虑车辆动力性,通过限制空调等电器负载的功率,结合对加速踏板扭矩需求的不同解析方案,充分保障车辆动力性输出。经济模式主要考虑车辆的经济性,对电机功率、空调输出功率、最高车速等进一步进行限制,结合对加速踏板扭矩需求的不同解析方案,同时增大能量回收强度,获得更好的经济性,延长车辆续驶里程。不同的驾驶模式下,扭矩控制采用不同的加速踏板特性。
加速踏板特性体现了输出扭矩与加速踏板开度、当前车速之间对应关系。加速踏板扭矩输出主要分为三个部分:基础扭矩计算、扭矩系数计算以及补偿扭矩计算。加速踏板扭矩输出的控制原理图如下图所示。
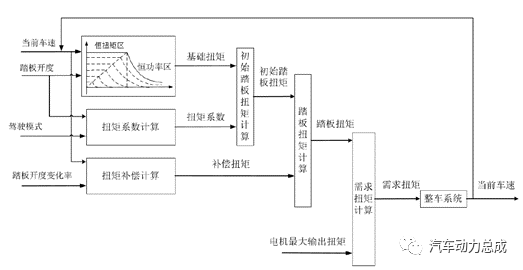
加速踏板特性主要是依据驱动电机的外特性曲线来制定,根据当前车辆的车速和加速踏板开度计算得到基础扭矩,再乘以当前驾驶模式下的扭矩系数计算的到初始加速踏板扭矩。在一定的车速下,基础扭矩的表达式为:
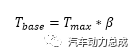
其中,为基础扭矩;为当前车速下电机对应的最大扭矩;为加速踏板开度。

其中,为初始踏板扭矩;为扭矩系数;为踏板扭矩;为补偿扭矩;为需求扭矩;为电机最大输出扭矩。其中扭矩系数可以根据加速踏板开度和驾驶模式的查表获得。补偿扭矩是根据实际车速在加速踏板扭矩的基础上再补偿一部分扭矩,适度提高动力输出,以实现驾驶员在急加速的情况下的驾驶意图。
3. 减速-制动能量回收时的扭矩计算
当加速踏板开度小于0时,认为此时不需要扭矩输出并将扭矩输出断开,此时扭矩输出为0;当下处于D挡并踩下制动踏板时,为提高整车的经济性,此时进行制动能量回收。此时扭矩计算值大多使用查表的方法,查表的输入为制动踏板的开度与电机转速,输出值为电机的扭矩值,不过此时由于电机处于发电机状态,因此扭矩输出需乘-1。
4. 跛行模式-出现故障时的扭矩计算
跛行模式下,整车控制器会控制驱动扭矩采用固定值替代运行的处理方式对车速及输出扭矩进行限制。在整车进入跛行模式后,整车车速限制为20km/h,且跛行模式下电机的最大输出扭矩为60Nm。在加速踏板系统中(油门踏板信号是两路位置传感器的电压采样 AD 值,将两路 AD 值分别进行滤波后,各自采取线性算法计算开度(%)后,取平均值),如果两路加速踏板传感器都出现了不可自动恢复的故障,此时整车控制器决策后会以10%的加速踏板开度值来输出驱动扭矩,以保证汽车能以较低的车速继续驱驶,“跛行回家”。



编辑推荐




最新资讯
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
-
天检新能力VOL.95 | 乘员晕车仿生测试能力
2025-04-25 10:14
-
一文带你了解自动驾驶数据合成的发展现状
2025-04-25 10:12
-
沃尔沃汽车:北欧豪华的典范
2025-04-25 09:48
