




 广告
广告





















































驾驶辅助AEB功能测试技术现状及发展

近年来,各车型搭载的主动安全配置在逐步地提升,其评价体系也在逐步完善。在国外,欧洲新车评价体系Euro NCAP率先在2014年起将驾驶辅助中的AEB (Autonomous Emergency Braking),LSS(Lane Suppo rt System)等功能提出了标准化的评价体系并纳入了整车星级评价体系中。此外,欧盟在最新的GSR法规中强制要求从2022年7月起新车型配置符合诸如ECE R152标准的AEB系统,符合EU 2021/646标准的车辆紧急道路辅助系统等。我国政府机构也逐渐规划和出台了相关的行业标准及评价体系,如C-NCAP在2018年开始引入了驾驶辅助在内的星级评价体系,同时GB/T 38186-2019也规范了AEB系统及功能规范及性能要求等。
第一节 传统AEB测试场景
为了完善车辆主动安全性能,需要按照标准化的试验场景,不断地进行功能打磨,调整平衡各个控制部件之间的标定参数。整车试验工作量巨大,对人力物力以及经验要求比较高,经过多年的发展,上汽创新研发总院已经具有了完备的主动安全整车试验技术积累。
1.1 AEB CCRm(Car to Car Moving)试验
在C-NCAP中,CCRm是指前车以20km/h的速度慢行,测试车辆以30/40/50km/h的速度靠近前车。通过对两车接触时刻的相对速度进行性能打分,综合各个场景权重,进行评价。

图1 CCRm测试场景
1.2 AEB VRU_PED (Vulnerable Road Users_Pedestrian)试验
在C-NCAP中,近端场景CPNA(Car to Pedestrian Nearside Adult)是指行人以5km/h 的速度在车辆行驶的垂直方向移动。测试车辆分别以20/30/40/50/60km/h 的速度进行测试。
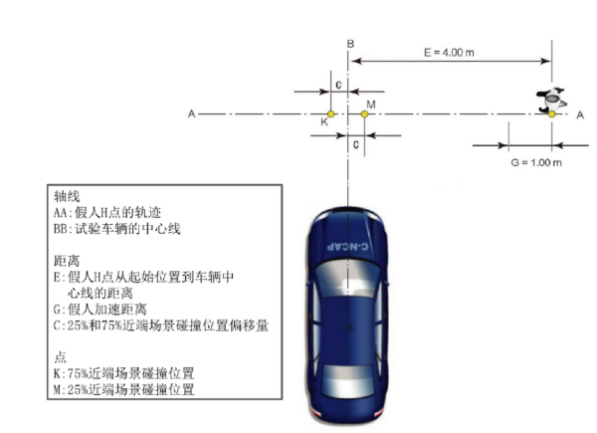
图2 CPNA测试场景
第二节 新增AEB弯道测试场景
为了促进车辆安全技术的发展,追求更高的安全理念。Euro NCAP 在2020版增加了一些事故率高发的场景,比如CCFtap(Car to Car Front Turn Across Path)等。通过对现有事故数据进行分析,C-NCAP 2025版本预计也将新增更多目标物及转弯场景的AEB测试场景。
CCFtap是指车辆向前行驶转弯穿过交叉路口,对向车辆迎面驶来,两车前部碰撞的场景,以检验测试车辆的AEB功能。相较于横向场景,该场景功能实现的主要难点有:
1)摄像头对于车头、车身侧面的检测能力;
2)摄像头视场角的限制,导致对目标检测中断、不连续;
3)雷达对对向临车道目标的检测能力;
4)测试车辆与对向来车的行驶轨迹预测能力。
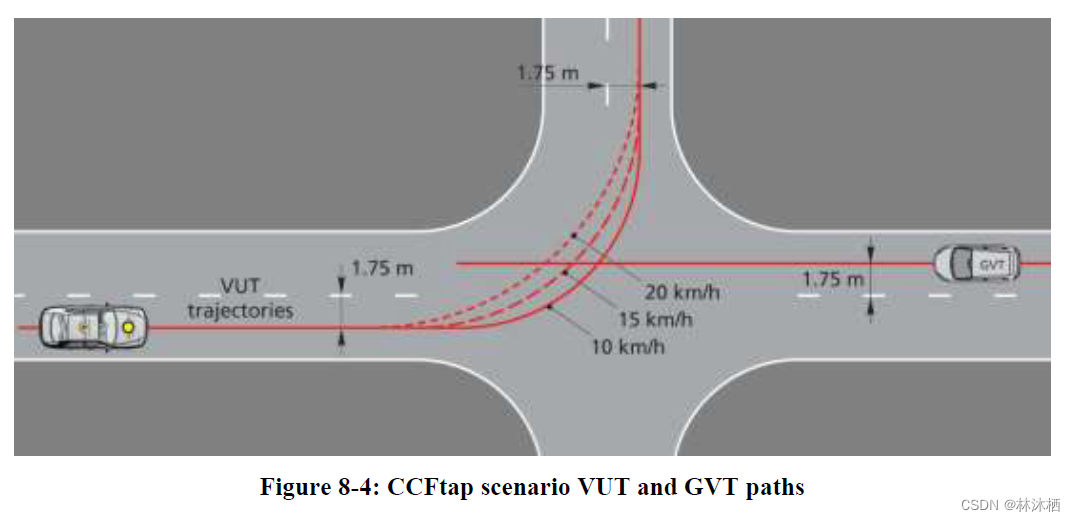
图3 CCFtap测试场景
最近朋友圈出彩的MG MULAN车型,瞄准海外市场,在这一细分领域表现出了新一代产品的竞争力。按照规程的测试路径进行新场景搭建,在该场景下对MG MULAN进行相关功能测试。结果显示,MG MULAN克服了这些技术难点,在这一场景中取得了出色的成绩。
小结
虽然人们采用各种方法来保证驾驶员的安全,但是如何避免事故发生或者减轻事故的严重程度是我们对于未来车辆安全的一个讨论重点。实现最大程度地减少事故发生率,能更好地体现车辆安全性,从而将事故伤亡率降至最低。可以预见,主动安全将成为未来汽车安全技术发展的重点和趋势。上汽创新研发总院将紧跟法规要求,提升规程解读及实车测评能力,丰富测评场景;同时加强虚拟场景仿真测试能力,通过硬件在环(Hardware-in-the-Loop, HIL)仿真测试虚拟测评等方式,提升测试效率。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
