




 广告
广告





















































PHEV动力总成惯性参数实验

摘要:在科教互融、校企互促的背景下,将校企合作课题中的PHEV动力总成惯性参数实验设计转化为车辆工程专业本科实验教学内容。以某款PHEV动力总成为实验对象,设计了实验方案,阐述了实验原理与坐标转换,通过实验及计算处理,获得了惯性参数。该实验贴近工程实际,并具有探索性与研究性,丰富了本科实验教学内容,更有利于锻炼学生的实践创新能力。
关键词:PHEV;动力总成;
惯性参数插电式混合动力汽车(plug.in hybrid electricvehicle,PHEV),既有传统汽车的发动机、传动系统等部件,又有纯电动汽车的电池、电机等部件,兼具两者优势,既可实现纯电动、零排放行驶,也能通过多种驱动模式以提升性能、延长续航里程,因此得到了各方的重视。汽车技术日新月异,为培养造就综合型、创新型的“新”车辆工程人才,让工程教育回归工程,本科实验内容要求更具时代性、探索性与综合性,注重社会需求与工程实际的结合。因此,将源自校企合作项目的PHEV动力总成惯性参数实验引人本科教学实验中,锻炼学生运用多重知识、使用现代工具探索实验的创新能力,在实验过程中达成能力培养的目的。
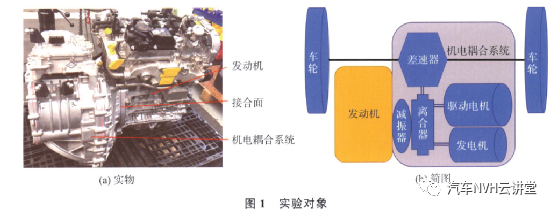
1 实验对象
文中以某款PHEV车型的混联式混合动力总成(以下简称“动力总成”)为实验对象,结构组成如图1所示。其中的机电耦合系统是将驱动电机、发电机、传动机构、离合器、差速器等集成在一起的单速比传动动力分配系统。发电机与发动机并排同轴布置。根据不同行驶工况,将“油”和“电”两种动力耦合起来,扬长避短,可实现纯电驱动、增程驱动、混合驱动三种高效的驱动模式。
2 实验方案由于整个动力总成体积重量较大,而且由许多不规则零部件组成,因此需要设计专门的实验方案以期高效且精确地获得整个总成的惯性参数。利用我校自主研发的设备及测试软件,实验方案与实物连接如图2所示。在自由悬吊下,由于万向节的连接作用,摆盘、万向节、待测件的质心理论上均在扭摆中心轴线上。无论如何变换待测件的姿态,其质心理论上总在扭摆轴线上。通过光电传感器测量出其扭摆周期,三坐标测量仪获取其角度与坐标信息,然后进行坐标转换与计算处理,即可得到所需的惯性参数。
3 理论原理在空摆状态下,即未装载待测动力总成时,已知摆盘及相关附件的质量mo,扭摆半径R,吊绳长L,空摆的扭摆周期,则摆盘对于扭摆中心轴的转动惯量Jo,可由式(1)求出[6-9]
装上待测动力总成,悬吊状态下,对于整个扭摆系统,以扭摆中心轴线的转动惯量,也可由式(2)求得。其中m为总质量,扭摆周期T可由光电传感器等测出。

其中,y为扭摆轴线在质心坐标系3个方向的夹角。Jx、Jy、J.和分别为被测件在质心坐标系下的转动惯量与惯性积。因此,待测动力总成绕某一扭摆中心轴线的转动惯量J1为

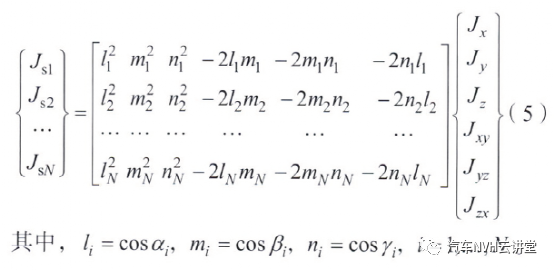
被测件绕第i条(i=1,2,…)扭摆轴线的转动惯量可被分解为:
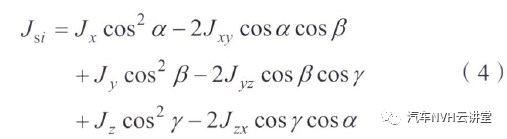
其中,α,β,γ为扭摆轴线在质心坐标系3个方向的夹角,Jx, Jy, Jz和Jxy, Jyz,Jzx分别为被测件在质心坐标系下的转动惯量和惯性积。通过实验测得绕互不相同扭摆轴线的转动惯量代入式(5),用最小二乘法求得质心坐标系下的转动惯量和主惯性积。
4 坐标转换
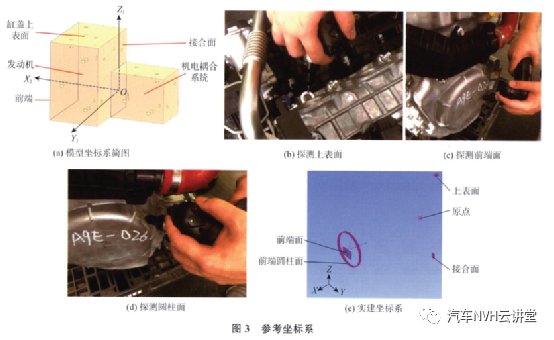
动力总成的参考坐标系是在动力总成机体用于描述动力总成质心位置的坐标系,如图3(a)所示,质心坐标系是以质心为原点,用于描述动力总成惯性参数的坐标系。测量坐标系是与动力总成刚体固结的,由动力总成上的3个特征点形成的过渡坐标系。根据式(2)、(4)和(5),为得到夹角以α,β,γ在各悬吊姿态下,通过在摆盘坐标系下测量3个特征点的位置,得到摆盘轴线在测量坐标系下的位置。通过坐标转换,即可得到摆盘轴线存参考坐标系下的位置,从而可获取摆盘轴线与质心坐标系各坐标轴之间的夹角。坐标系的设计建立如下。
4.1 参考坐标系
建立参考坐标系时,要选择表面特征加工精度高、定位相对准确的区域进行建立,建立过程如图3所示。1)Z1轴.发动机缸盖上表面为参考坐标系的z1轴法平面,z1轴正方向指向发动机上端。2)X1轴。如图3(c)、3(d)所示,通过探测发动机前端园柱面获取其轴线。以该轴线与发动机前端平面的交点,在发动机与机电耦合系统的接合面上的投影点作为坐标系原点O1,以原点O1指向交点的射线作X1轴,3)Y1轴。Y1轴正方向根据x1、z1轴正方向与右手法则定义。最终探测的实建坐标系如3(e)所示。
4.2质心坐标系
动力总成质心坐标系O0-X0Y0Z0是以动力总成的质心为坐标原点,各坐标轴平行于动力总成坐标系O1-X1Y1Z1,且方向一致。
4.3测量坐标系
为建立与动力总成刚体固结的测量坐标系O2-X2Y2Z2,以描述刚体及转轴的空间方位。结合动力总成得到结构特点和姿态预测,在机体上寻求3个特征点P1、P2、P3,如图4(a)所:,由此3个特征点定义坐标系为:P。指向P2的方向为02局轴,沿P3到P1P2的垂线且指向P3的方向为O2Y2轴,P1点为坐标原点O2,实建坐标系如图4(b)所示、
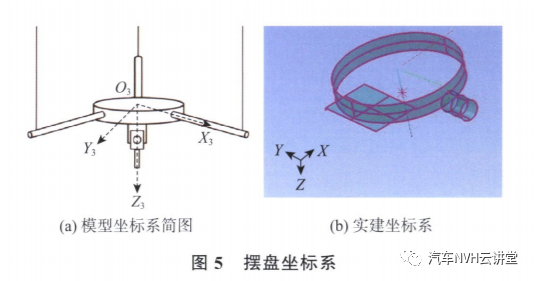
4.4摆盘坐标系
选取摆盘下表面为参考平面,摆盘下表面中心为原点03,建立摆盘坐标系03-x3y3z3,如图5所示,参考平面的法线方向为o3Z3轴,选其中一摆盘摆臂轴的轴向为O3x3,轴,右手定则确定O3y3轴。
5 实验过程
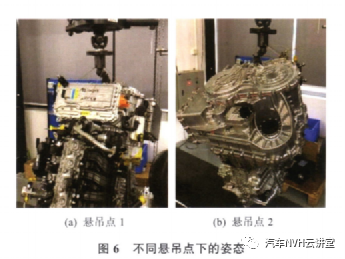
(1)称重。将动力总成充满冷却液,排空润滑油测量动力总成质量。(2)确定悬吊点。为了减小拟合误差,需确定多个不同的悬吊姿态,选择分别沿着3个坐标轴取3组,分别沿3个坐标轴的两条角平分线选取6组,分别沿3个坐标轴成30°角取3组。悬吊姿态示例如图6所示
(3)测定周期。在各姿态下,通过光电传感器与测试软件结合,测出其扭摆周期。(4)测定坐标。在摆盘坐标系下,在各姿态下,用三坐标测量仪获得3个特征点Pl、P2、P3的参数值,得到的坐标值分布如图7所示。
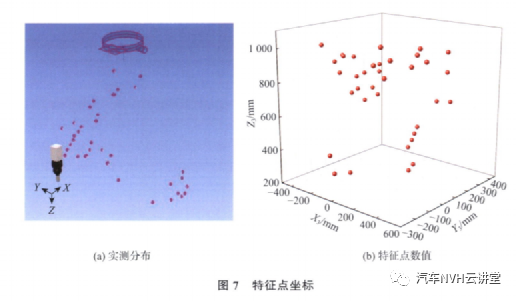
(5)计算。将获取的各悬吊姿态下的特征点坐标位置与扭摆周期,代人相应的计算公式或输人实验软件,即可得到被测体在参考坐标系下的惯性参数。
6 实验结果
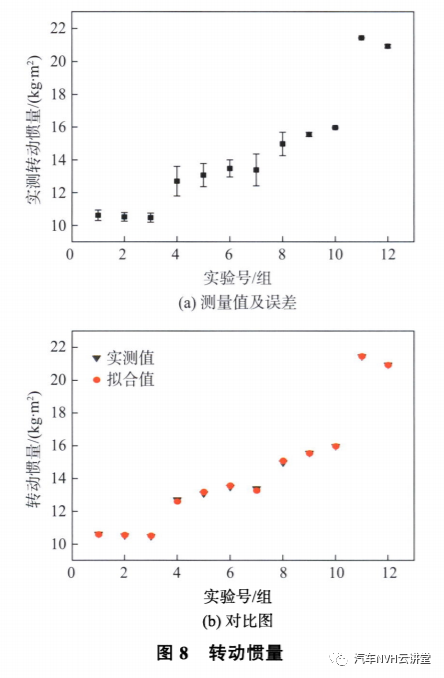
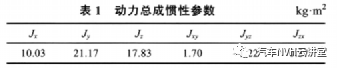
将测量的参数输入我校自主研发的计算软件进行计算处理。12组实测的转动惯量结果及误差如8(a)所示,绝对误差平均值为0.05,相对误差平均值为0.4l%,其中第4与第7组误差较大,经过筛选保留误差较小的实验组,再计算处理,绝对误差平均值降为0.04,相对误差平均值降为0.30%,实测值与拟合值对比如图8(b)所示,最终计‘算获得在质心坐标系下的动力总成惯性参数如表1所示。
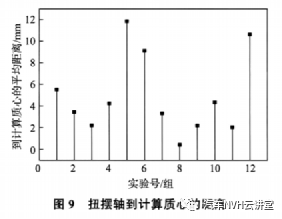
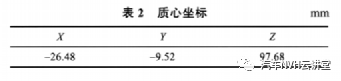
对于质心,理论上,对被测件进行多次悬吊,质心将落在各扭摆轴线交点处。然而,实际中存在误差,实验中获得的悬吊垂线常为异面直线,此时将两条扭摆轴线的公垂线中点作为测试质心,通过多组实验,剔除误差较大的组数,将剩余结果的均值作为计算结果。实验结果如图9所示,第1、5、6、12组的误差较大,经剔除筛选,扭摆轴到计算质心的平均距离为2.76 mm,从而得出在参考坐标系下的动力总成的质心坐标,如表2所示。
7 结语
本实验典型地要求综合运用数学、物理、力学等基础“旧”知识,应用到汽车专业领域以探求新事物,获取“新”知识。实验过程中的姿态变换,三坐标的使用,坐标建立与变换等,既要求较强的硬件处理能力,还要求有一定的软件处理能力,有效地锻炼了学生的工程实践能力。将校企合作科研项目工程案例实验内容经设计加工引入到实验教学课程,在实验教学过程中强化了学生的工程实践能力和创新能力。
作者:魏政君,李广龙,李利平作者单位:(华南理工大学机械与汽车工程学院,广东广州510641)
来源:实验技术与管理







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
