




 广告
广告





















































在Carla模拟器利用英伟达SFF的自动驾驶策略

论文 “Rationale-aware Autonomous Driving Policy utilizing Safety Force Field implemented on CARLA Simulator“,来自韩国延世大学。
安全模型,英伟达的安全力场(SFF)和Mobileye的责任敏感安全(RSS)等对决策来说是有可解释性的数学模型。这项工作从头开始实现SFF,替代未公开的英伟达源代码,并将其与CARLA开源模拟器集成。使用SFF和CARLA,提出了一个车辆声明集合的预测器,并以此提出一种综合驾驶策略,无论在通过动态交通时遇到什么安全条件,其都能持续运行。该策略没有针对每种情况制定单独的规划,但利用安全潜能,目的是将类人的驾驶融入交通流中。
责任敏感安全(RSS)将自车的危险时间t与纵向/横向的危险阈值时间tlong/tlat进行比较。如果达到阈值,RSS判断为危险情况,并根据纵向或横向加速度对速度的限制做出适当的响应。换句话说,阈值可以用轨迹集的多边形表示。如果自车和其他道路使用者之间的轨迹集相交,RSS会选择以下三个决策中的一个来恢复安全状态:刹车,继续前进或开车离开。
安全力场(SFF)表示,如果参与者遵循安全程序(这是一系列控制策略),量化风险的安全潜能ρAB不会再增加,因此可以保证参与者最终不会造成不安全的情况。这可以通过安全潜能的链式法则从数学上证明。简而言之,RSS的方法是最小化参与者声称集合之间的交集,这是每个参与者安全程序产生轨迹的联合。
英特尔发布了一个名为ad-rss-lib的开源库,该库部分实现了RSS。此外,NVIDIA还提供了一个名为DriveWorks SDK的软件开发工具包,其中包括针对经批准用户的SFF实现。Intel ad-rss-lib没有涵盖其论文的全部范围,但它提供了Python绑定和CARLA集成。然而,NVIDIA DriveWorks SDK是一个非公开IP,它的实现是为了与配备NVIDIA DRIVE OS的NVIDIA DRIVE平台集成,因此研究人员很少使用它。在Intel和NVIDIA建议的将RSS和SFF与现有自动驾驶系统集成的基本示例架构中,RSS和SFF扮演着最后的角色,通过重写规划子系统的决策来防止自动驾驶车辆发生碰撞。
在SFF实施中使用声明集合和安全潜能的概念,声明集合就是安全程序(驾驶策略)获取的轨迹之联合,安全潜能是两个参与者的声明集合之间相交测度及其负梯度。该文提出了一种将SFF集成到规划子系统中的方法,制定一种类似人类的驾驶策略,无论在安全或不安全的条件下都能始终如一地运行,最终尽量不阻碍顺畅的交通流。
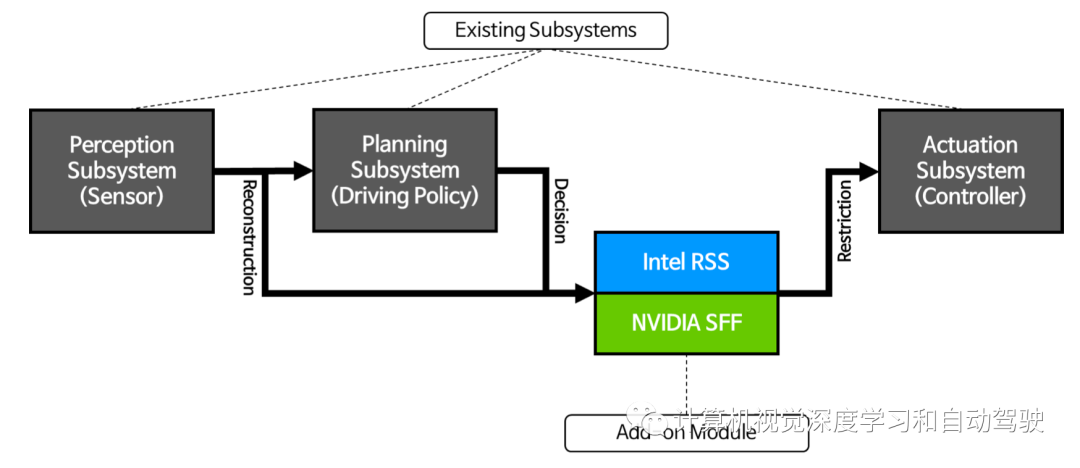
Intel RSS或NVIDIA SFF作为与现有子系统协调的附加模块。它接收来自感知子系统的世界环境数据和来自规划子系统的机动决策。为了自车的安全,作为上层限制器,它可以推翻接收的决策,并将限制的决策传递给驾驶子系统。如图是具有RSS或SFF安全模型的基本示例架构:灰色是现有子系统部分,蓝色/绿色是附加模块的RSS/SFF实现部分。
计算安全潜能是SFF的核心,但安全潜能是从声明集合中得出的,而声明集合是从安全程序中得出的。因此,按照英伟达的意图,驾驶策略应该首先由开发商以自己的方式设计。只有在驾驶策略完全实施后,SFF才能应用于自动驾驶系统。在这种情况下,要应用SFF,实施驾驶策略是首要任务。
相反,在不同的背景下,这里试图利用SFF的安全潜能实施驾驶策略。然而,为了获得计算安全潜能所需的声明集合,陷入了一个矛盾,即安全程序必须已经实施。为了消除从安全程序推导的需要,这里提出一种学习声明集合的预测器方法。利用CARLA模拟器提供车辆状态的真值,通过监督学习方法训练预测网络。该预测器用车辆的状态向量和BEV图像作为输入,并输出所有车辆的2D动作:构成声明集合的x轴加速度和y轴加速度。用光滑函数(如mollifier)覆盖该声明集合,可使声明集合可微,从而计算两个参与者声明集合之间的相交区域来获得安全潜能。这样,在没有现有实施的安全程序的情况下,可以获得每个参与者车辆的声明集合和安全潜能。
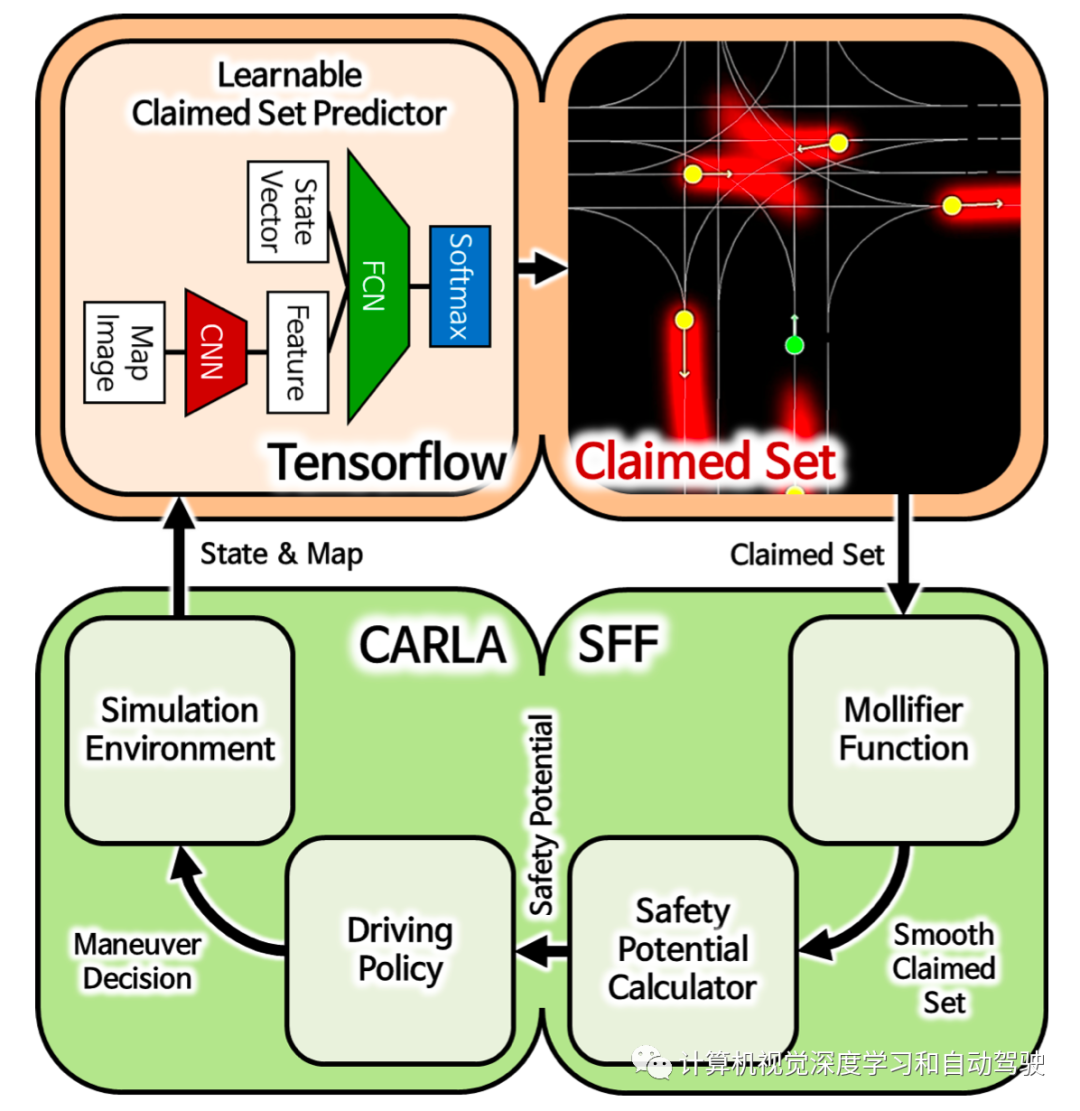
该系统如图所示:SFF嵌入CARLA组成的仿真回路;SFF集成声明集合的预测网络,实现原理-觉察的自动驾驶策略(右上角的红色区域:其他车辆的声明集合由训练的预测网络进行预测)。
在CARLA模拟中获得所有车辆的声明集合,并使用这些声明集合,可以计算自车的安全潜能。为了验证所提出的模型是否得到了正确的实施和训练,用计算的安全潜能,最终可以制定一个统一的驾驶策略(安全程序),能够持续运行,无需分别处理安全条件和不安全条件的两个单独模块。综合驾驶策略最终目标是像人一样,而不是过于教条或被动地无法顺畅地处理交通流。
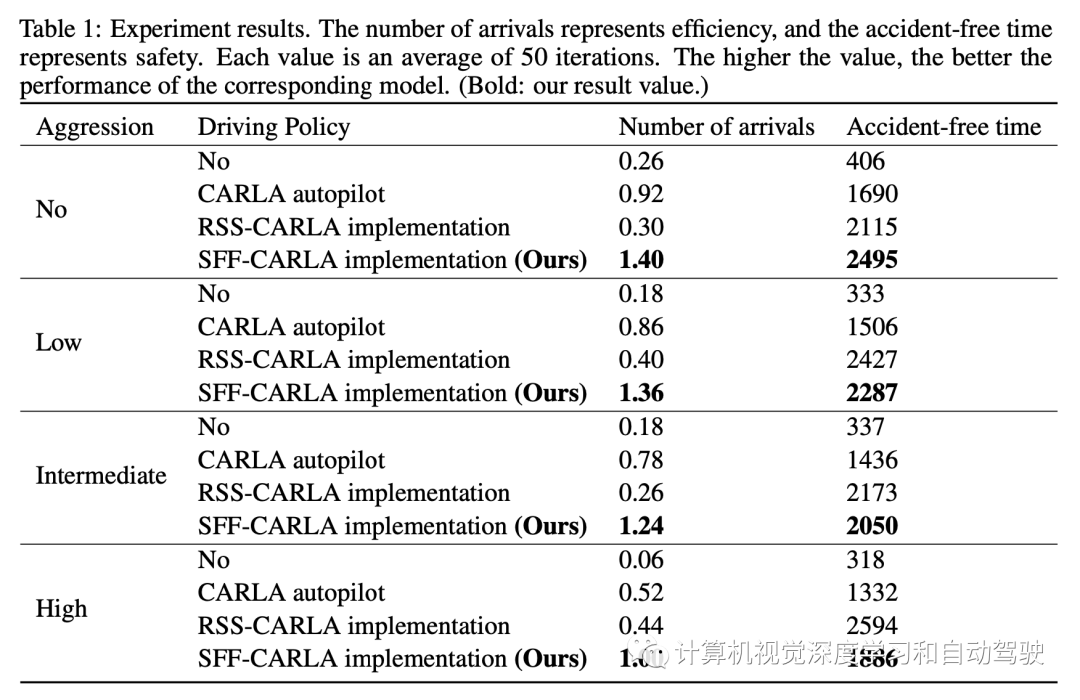
为了评估SFF实施是否等同于现有模型,将驾驶策略与CARLA自动驾驶和CARLA上的RSS实施进行了比较。用声明集合预测器测试自动驾驶智体,在有其他随机攻击性车辆行驶的道路上驾驶。随机攻击意味着,根据概率超参,有时其他车辆不关心其周围和交通信号。将随机攻击分为4个级别。在这个实验中,测试了智体在不干扰CARLA交通流的情况下如何快速安全地到达目的地。在给定的时间段内,统计随机指定目的地的到达车数和自车的无事故时间区。
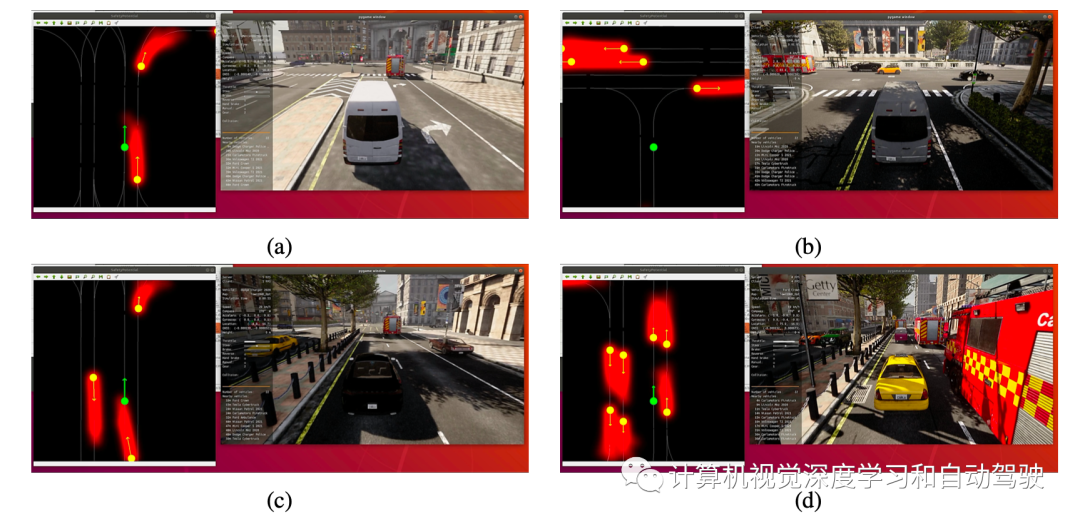
如图是声明集合预测和CARLA模拟器相应场景的可视化:绿点是自车的位置,黄点是其他车辆的位置,红色区域是其他车辆的声明集合,由经过训练的预测网络预测,并由mollifier平滑。
实验结果:
- 下一篇:自动驾驶仿真技术横览
- 上一篇:(动力)电池主要公开技术汇总



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
