




 广告
广告





















































自动驾驶仿真技术横览
2022-11-29 10:22:04· 来源:AUTOINFO

仿真即通过虚拟方法简化或替代真实世界;但往往与真实世界越接近,模型的复杂度就越高,计算量越大。受计算科学发展制约,自动驾驶仿真测试最初并不能为多数开发者接受。 自动驾驶汽车在真正商业化应用前,需要经历大量的道路测试才能达到商用要求。采用路测
仿真即通过虚拟方法简化或替代真实世界;但往往与真实世界越接近,模型的复杂度就越高,计算量越大。受计算科学发展制约,自动驾驶仿真测试最初并不能为多数开发者接受。
自动驾驶汽车在真正商业化应用前,需要经历大量的道路测试才能达到商用要求。采用路测来优化自动驾驶算法耗费的时间和成本太高,且开放道路测试仍受到法规限制,极端交通条件和场景复现困难,测试安全存在隐患。
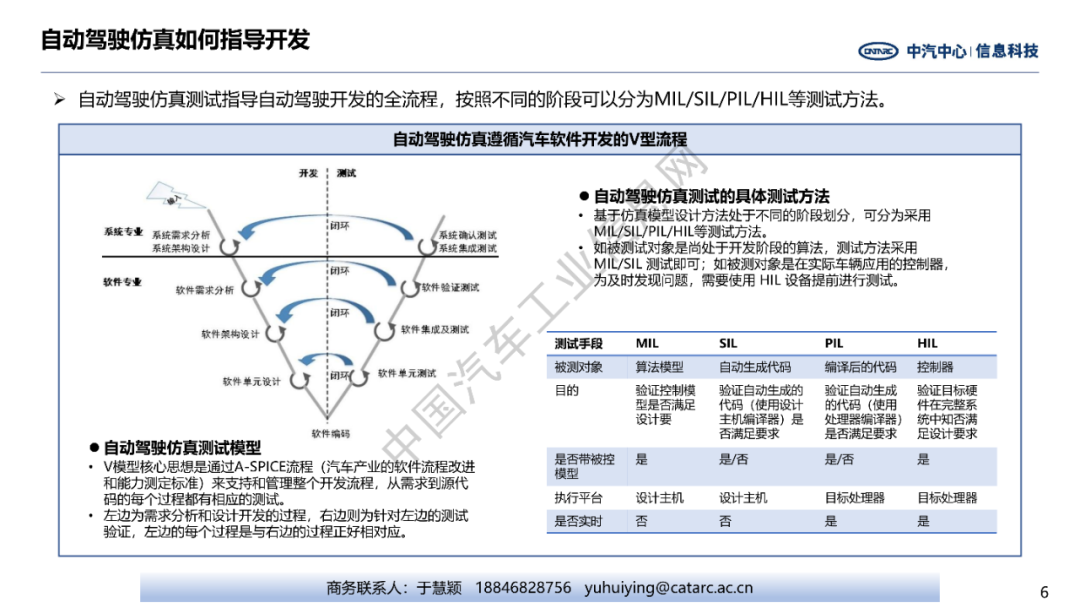
所以目前在自动驾驶的开发流程中,纯模型仿真、软件在环仿真、半实物仿真、封闭场地道路测试、开放道路测试的开发流程是最经济、高效的开发流程。
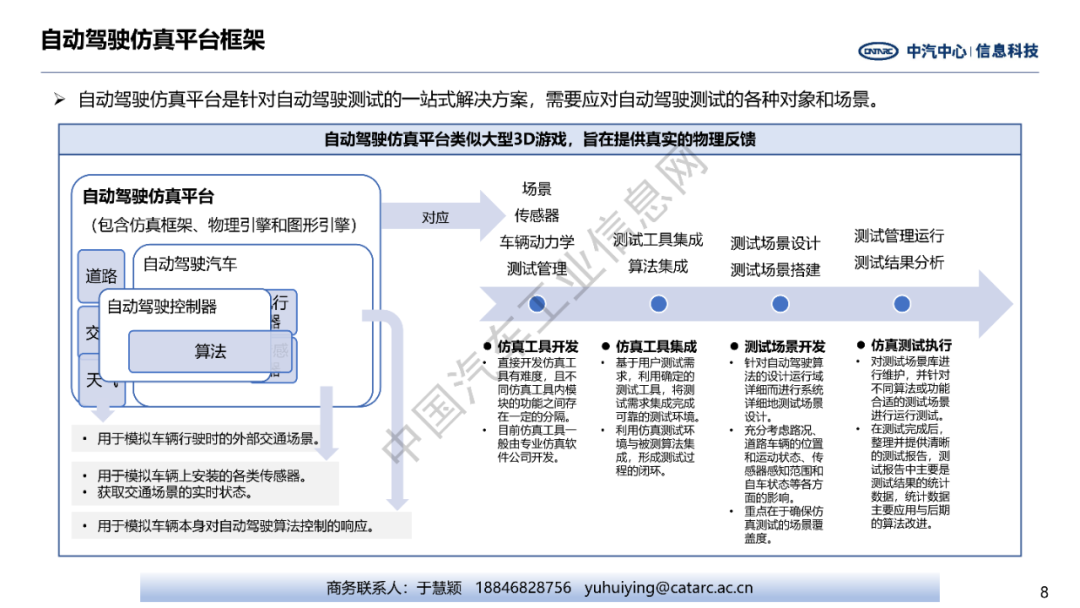
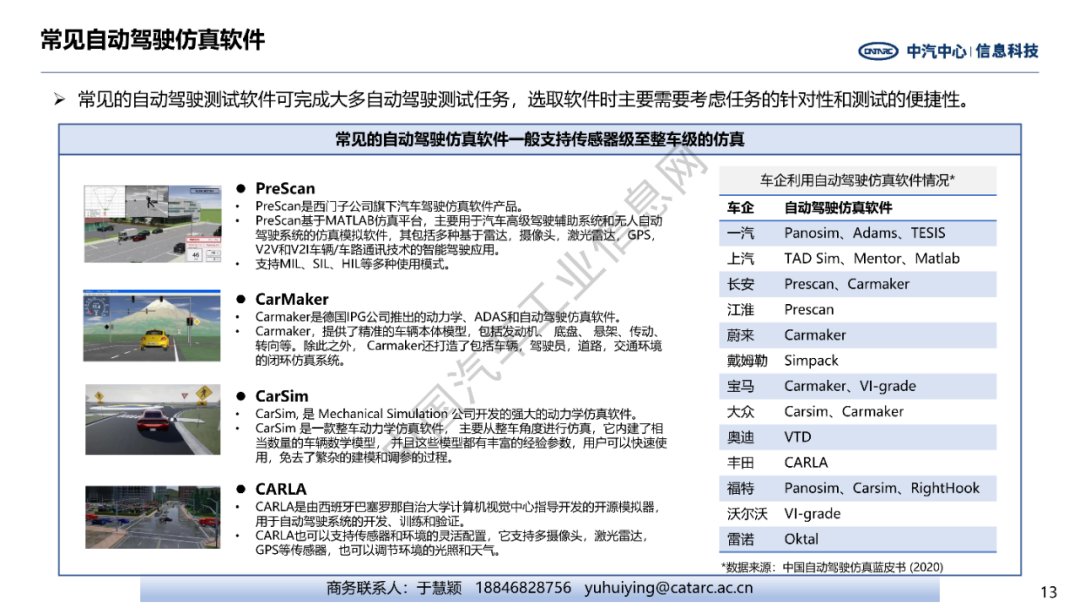
目前市面上与自动驾驶仿真相关的软件很多。第一类是专门的自动驾驶模拟仿真软件,如Prescan、VTD、51sim-one、Panosim、GaiA等等。第二类是基于游戏引擎做的自动驾驶仿真软件,主要代表是基于Unity的Lgsvl Simulator、baidu-Unity,基于Unreal的Carla、Airsim等。第三类是基于一些机器人仿真软件做的自动驾驶仿真器,如基于ROS的Gazebo、rviz开发的仿真平台,基于blender开发的平台等等。








编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
