




 广告
广告





















































车辆动力学与稳态转向特性分析

汽车的稳态转向特性分为三种类型:不足转向、中性转向和过多转向。这三种不同转向特性的汽车具有如图1所示的行驶轨迹的特点:在方向盘保持在一个固定转角 下,缓慢加速或以不同车速等速行驶时,随着车速的增加,不足转向汽车的转向半径R增大;中性转向汽车的转向半径维持不变;而过多转向汽车的转向半径则越来越小。
下,缓慢加速或以不同车速等速行驶时,随着车速的增加,不足转向汽车的转向半径R增大;中性转向汽车的转向半径维持不变;而过多转向汽车的转向半径则越来越小。
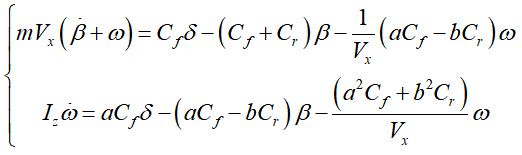
图1 车辆不同转向特性示意图
中性转向车辆的行驶曲率满足如下表达式:
其中,ρ是行驶曲率,R为转弯半径,δ为前轮转角,L为车辆前后轴距,w为车辆横摆角速度,Vx为车辆纵向行驶速度,ay为车辆横向加速度。
纯主动转向模式
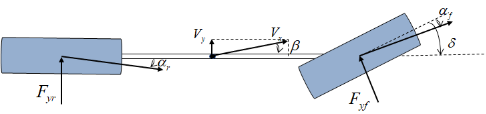
为了便于掌握操纵稳定性的基本特性,我们将对一个简化为线性二自由度的汽车模型进行研究。分析中忽略转向系统的影响,直接以前轮转角作为输入;忽略悬架的作用,认为汽车车厢只做平行于地面的平面运动,即汽车沿z轴的位移,绕y轴的俯仰角与绕x轴的前进速度Vx视为不变。因此,汽车只有沿y轴的侧向运动与绕z轴的横摆运动这样两个自由度。此外,汽车的侧向加速度限定在0.4g以下,轮胎侧偏特性处于线性范围。在建立运动微分方程时还假设:驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用,忽略左、右车轮轮胎由于载荷的变化而引起轮胎特性的变化以及轮胎回正力矩的作用。这样,实际汽车便简化成一个两轮自行车模型,更详细的讨论可参考公众号文章:车辆二自由度动力学模型建模及其离散化应用、基于二自由度模型的MPC在车辆横向控制中的应用。如图2所示,它是一个由前后两个有侧向弹力的轮胎支承于地面、具有侧向及横摆运动的二自由度汽车模型。
图2 车辆二自由度模型示意图
则可得车辆二自由度模型为:
其中,Vx为车辆沿X轴方向的速度,m为车辆总质量,β为质心侧偏角,w为横摆角速度,δ为前轮转角,a和b为质心到前后轴的距离,Iz为整车绕坐标系Z轴的转动惯量,Cf和Cr为前轴、后轴的等效侧偏刚度。
由二自由度模型的平衡点可得稳态转向特性为:
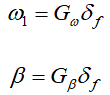
其中,稳态转向增益系数为

则前轮转角与行驶曲率之间有如下关系:
常用输出与输入的比值,如稳态横摆角速度与前轮转角之比来评价稳态响应,这个比值称为稳态横摆角速度增益,也称为转向灵敏度,以符号

表示。
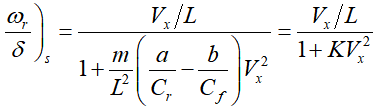
K为稳定性因数,其单位为s^2/m^2,是表征汽车稳定性响应的一个重要参数,根据K的数值,汽车的稳态响应可分为三类。
(1)中性转向
当K=0时,
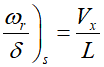
,即横摆角速度增益与车速成线性关系,斜率为1/L。这种稳态转向特性称为中性转向。
(2)不足转向
当K>0时,横摆角速度增益
比中性转向时小,这种稳态转向特性为不足转向,K值越大,不足转向量越大。
(3)过多转向
当K<0时,横摆角速度增益比中性转向时大,这种稳态转向特性为过多转向,K值越小,过多转向量越大。
纯差动转向模式
考虑如下图所示的纯差动转向情况:
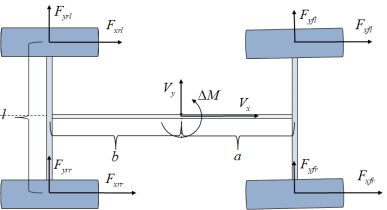
图3 纯差动车辆受力状态示意图
与图2所示的二自由度模型相类似,可得如下车辆二自由度模型:
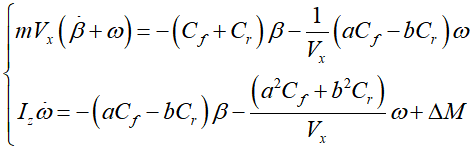
其中,△M为车身受到的横摆力矩。整理得
令

为零,求其稳态输出与控制量△M之间的关系得
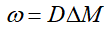
其中

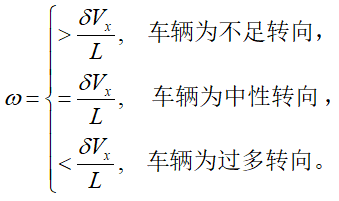
由车辆行驶曲率表达式可以得到控制量△M与车辆行驶轨迹曲率ρ之间的关系为
可见,纯差动转向时的稳态转向特性与纯主动转向时的稳态转向特性相同,均有K的数值的正负来决定。
主动与差动相结合的复合转向模式
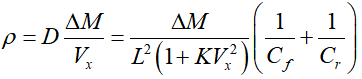
考虑如下图所示的主动转向与差动转向相结合的情况:
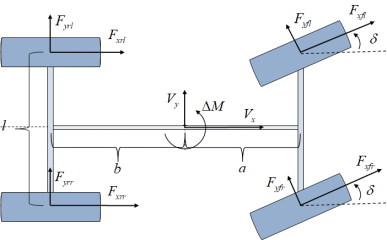
图4 主动与差动相结合的车辆受力状态示意图
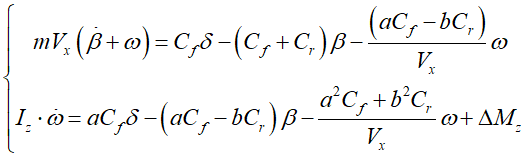
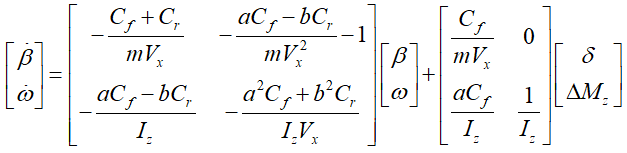
考虑到车辆附加横摆力矩的影响,此时的二自由度模型表达式为:
整理可得
令
,求其状态量的稳态值,得到
其中,

从而得到控制量△M与w、δ的关系,即

当给定期望横摆角速度与当前前轮转角时,可以得到令当前横摆角速度趋近期望横摆角速度的附加横摆力矩。同时发现G与纯差动转向中的增益D一致,W与纯主动转向中的稳态横摆增益一致。
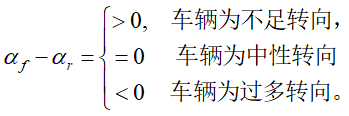
接下来确定车辆中性转向时所期望的横摆角速度。车辆前后轴侧偏角αf、与αr车辆稳态转向特性具有如下关系:
当质心侧偏角较小时,存在如下关系
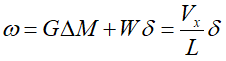
因此可得横摆角速度与转向特性的关系为
当车辆为主动与差动复合转向模式时,车辆中性转向的条件为:
此时的附加横摆扭矩△M为:
从而得到附加横摆扭矩与车辆转向特性之间的关系为
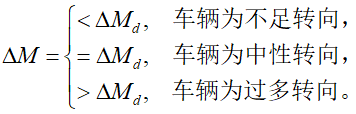
因此,当原车是中性转向时(K=0),并不能通过附加横摆扭矩改变车辆的稳态转向特性;当原车不是中性转向时(K≠0),可以通过对车身附加横摆力矩的调整,使车辆在不同转向特性之间进行调节,尤其当△M=△Md时正好可以将原先非中性转向车辆调节成中性转向车辆,而当△M>△Md时可以将车辆调节成过多转向车辆,这在智能车辆紧急避障或者极端驾驶场景中有着巨大的应用潜力。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
