




 广告
广告





















































基于FXLMS算法的车辆道路噪声多通道主动控制系统实验性能分析

摘要
本文建立了一种基于FXLMS算法的双通道汽车道路噪声主动控制系统。分析了滤波x最小均方算法(FXLMS)的复杂性。进行了台架试验和道路试验,以测试和分析控制系统的性能。
首先,建立了基于FXLMS算法的多通道主动控制系统的通用数学模型。分析了算法的计算复杂性。其次,建立了基于多通道FXLMS算法的硬件在环(HIL)测试台和基于DASP的测量系统,以测量有源噪声控制系统在各种工况下的降噪性能。最后,进行了台架试验和道路试验,并对结果进行了分析
介绍
主动噪声控制(ANC)的想法是由德国人P.Lueg在1936年以专利的形式提出的,但由于当时电子技术的限制,它仅用于理论研究。直到20世纪80年代初,随着电子技术的发展和高速信号处理器(DSP)的发展,人们开始尝试将自适应滤波技术应用于主动噪声控制,这使得其技术得到了快速发展。20世纪80年代末,国外主要汽车公司陆续将ANC应用于汽车噪声控制,国内大学在20世纪90年代中期开展了理论研究。汽车领域的主动噪声控制技术包括发动机噪声、进气和排气系统噪声和低频道路噪声。对发动机噪声主动控制技术进行了大量的研究,取得了良好的控制效果,并在许多车型上得到了应用。
自1989年Costin提出主动控制汽车道路噪声以来,许多研究人员在这一领域进行了一系列研究。南安普顿大学的Sutton博士围绕他的博士论文,对汽车中的道路噪声(RNC)的主动控制进行了深入研究。首先,改进了参考信号的选择方法。主成分分析(PCA)用于帮助选择最佳参考信号组合。通过离线仿真,研究了系统延迟对其降噪性能的影响。韩国研究人员朴研究了现代汽车的多通道前馈道路噪声主动控制系统。
hil测试结果表明,该系统在250Hz左右的15Hz带宽内可获得最大5~6dB的降噪效果。DUAN建立了多通道TF-FXLMS模型,该模型降低了算法的计算复杂性,并在100-170 Hz下实现了6dB的最大噪声降低。当前的研究主要集中在参考信号的选择、计算复杂性的降低和算法的研究。但对道路噪声主动控制系统的实验性能分析研究较少。
本文主要研究道路噪声主动控制系统的实验性能。首先,建立了道路噪声主动控制系统的理论模型,分析了算法的复杂性。然后,使用4个加速计、2个麦克风和2个车载扬声器构建基于dsPACE的HIL平台。同时,为了比较系统的降噪效果,搭建了一个基于DASP的噪声测量平台。最后,进行了台架激励测试和道路匀速测试,并对测试结果进行了分析和比较。
文章最后指出了当前系统存在的问题和未来的研究方向。
算法理论
本文中的RNC系统由FIR滤波器和自适应算法两部分组成。FIR滤波器重塑参考信号并构造次级声学信号。自适应算法的作用是自适应地调整FIR滤波器系数,从而使系统能够跟踪车辆内部噪声的变化。本文采用LMS算法作为一种自适应算法,该算法具有表达简单、计算量小、收敛速度快等优点。
图1显示了多通道道路噪声主动控制系统的FXLMS算法框图。假设有J个加速度计作为参考信号,在第n个样本处由xj(n)表示,k=1,2,…,J。每个参考信号在系统中彼此独立。然后参考信号可以表示为:

类似地,假设有M个扬声器作为次级源,它们由信号ym(n)驱动,其中M=1,2,…,M。假设自适应控制器w(z)控制M个扬声器发出M个次级声学信号(消除声学信号),则控制器w是M×J的矩阵,并且每列是长度L的自适应FIR滤波器。第m个扬声器产生的次级声信号由J个参考信号组成,可以表示为
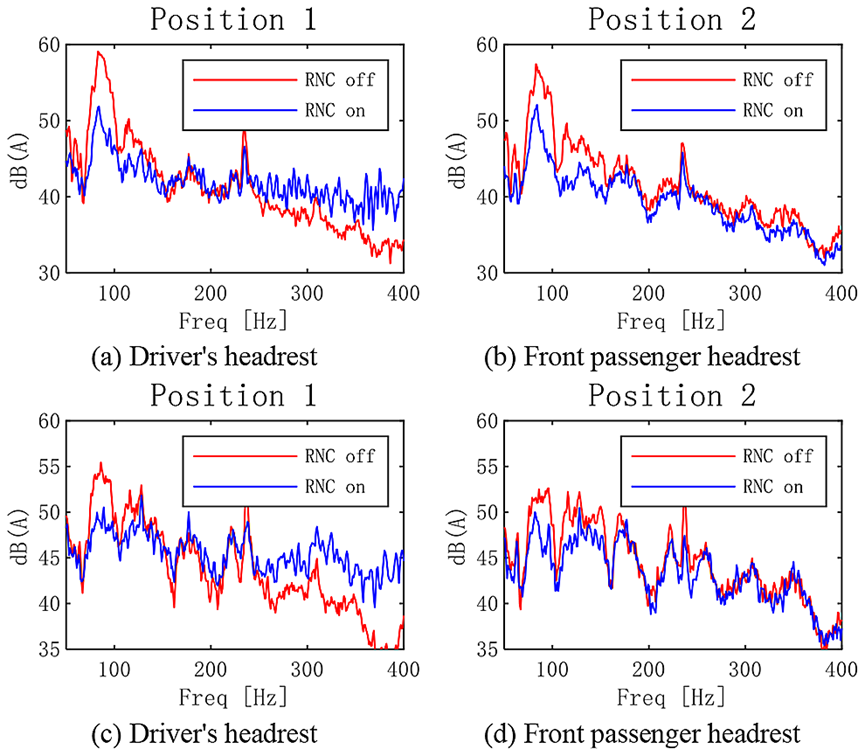
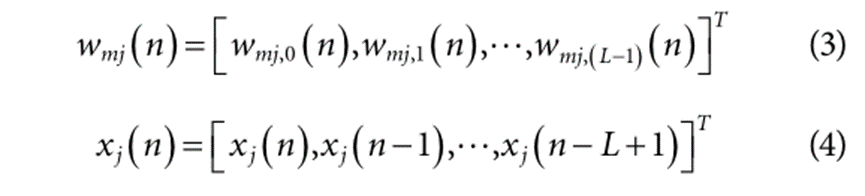
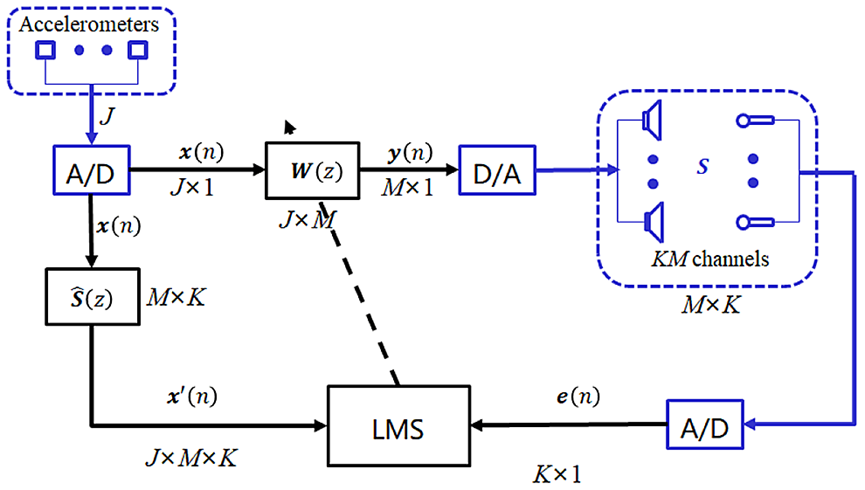
图1 多通道道路噪声主动控制系统框图
在公式2中,wmj表示时间n处的第L个自适应滤波器的系数向量,j表示第j个参考信号,m是第m个扬声器,xj(n)是第j个基准信号向量。
在图1中,次级路径矩阵s表示从扬声器到麦克风的传递函数。
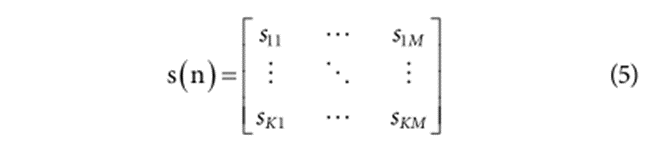
skm表示第m个扬声器和第k个麦克风之间的单位脉冲响应。第k个麦克风处的次级声信号为:
*表示卷积运算。将等式2代入等式6
因此,第k个误差麦克风测得的误差信号为:

其中dk表示第k个误差麦克风处的主噪声信号。由瞬时平方误差之和给出的最小均方自适应算法的代价函数定义为
为了最小化代价方程,必须满足wmj。

公式(7)(8)(9)梯度可以表示为
事实上,次级路径的单位脉冲响应skm是可测量的。假设次级路径是时间不变的,我们将测量的skm作为skm的估计。
因此,滤波后的参考信号可以表示为:


测试平台
测试平台由两部分组成。一个是用于实时操作控制系统的基于dSPACE的HIL系统,另一个是基于DASP的噪声测量系统。这两个系统完全独立地工作,以确保测量完全客观。
基于dSPACE的HIL系统
硬件车辆道路噪声主动控制系统以dSPACE实时仿真控制系统为核心。dSPACE控制系统由两部分组成:硬件和软件。硬件部分和外围设备之间的连接如图2所示。dSPACE硬件部分嵌入了连接到外围输入和输出设备的模数和数模转换模块。加速度计和声压传感器由信号调节器供电,信号调节器被放大并连接到dSPACE处理器的数模转换端口。在硬件处理器完成程序计算后,数字信号由数模转换模块转换为电信号,由功率放大器放大,然后通过扬声器传输。ControlDesk软件部分通过网线连接到dSPACE。一方面,生成并下载算法代码。另一方面,ControlDesk实时调整算法的结构和参数,以实现系统算法参数的连续优化。
本文中的测试使用了四个PCB加速计、两个麦克风和两个汽车扬声器。如图4所示,加速度传感器布置在副车架的左侧和右侧以及扭力梁周围。每个加速度传感器测量垂直方向和纵向方向的加速度信号,共有八个参考信号。麦克风放置在驾驶员头枕和前排乘客头枕处,扬声器在前门使用两个汽车扬声器。我们可以同时测量噪音和加速度。
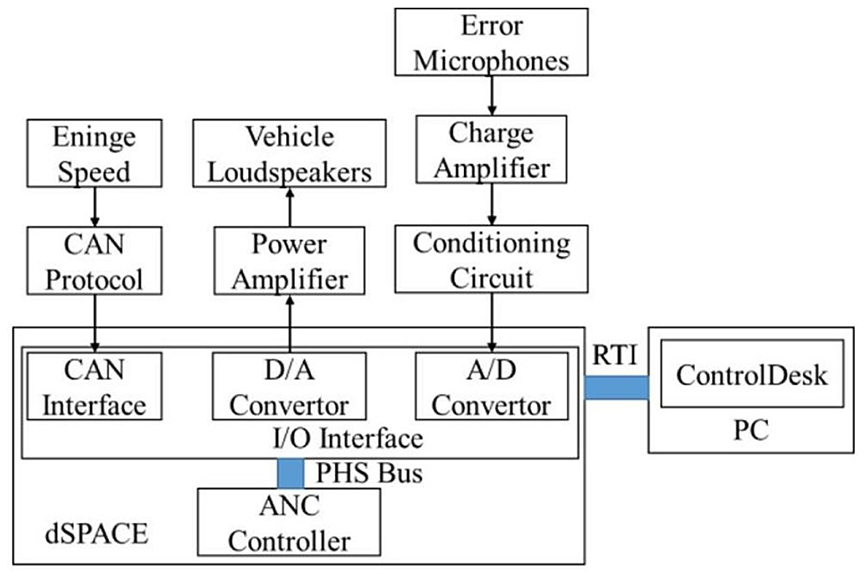
图2 HIL系统示意图
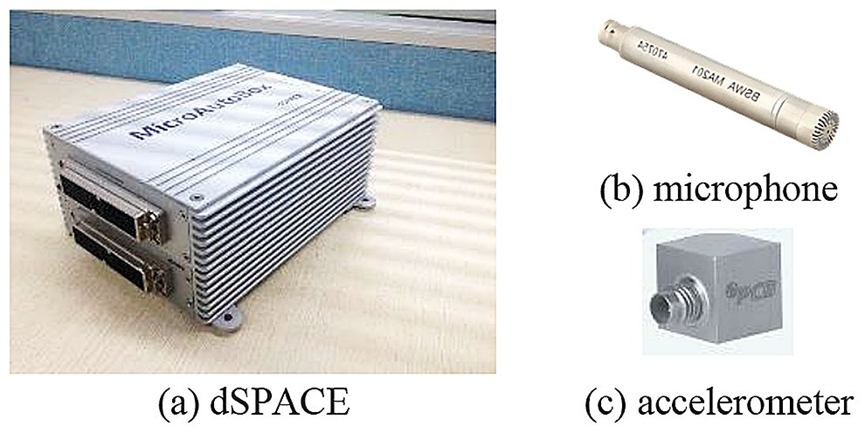
图3 测试硬件
基于DSAP的测量系统
为了评估乘客舱系统的降噪效果,安装了高精度测试麦克风MPA201,如图6(a)所示,测量点的位置符合GBT 18697-2002《声学车辆内部声音测量方法》中规定的麦克风放置位置。共有2个测量点布置在乘客的耳朵旁边,即测量点1和2,特别是在驾驶员座椅和辅助座椅上,如图5所示。测量系统中使用的信号采集仪器是DASP INV3060S,如图6(b)所示。
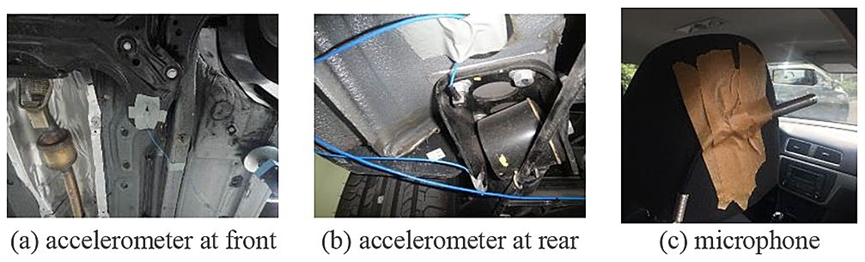
图4 麦克风和加速计布置
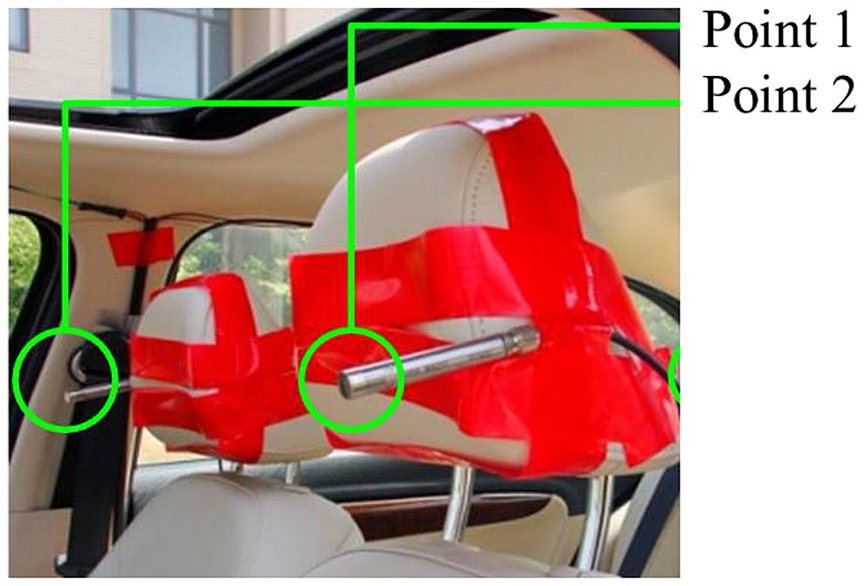
图5 测量点布置
图6 测量系统硬
试验台试验
本文以国产A级轿车为试验对象,进行了RNC试验。测试场地是校园里笔直的测试跑道。乘员状态的前排仅位于驾驶员身上,后排的两位乘员操作数据采集仪器和控制器。测试期间窗户都关上。
实验条件
HIL平台、参考加速度和麦克风传感器位置与前一节(基于dSPACE的HIL系统)一致。使用提升架将车辆提升至离地面约50 cm的位置,图7中将激发点选为扭力梁的中点。通过道路噪声主动控制系统控制平台,主动控制了不同激发条件下前头枕的内部噪声。采集控制系统前后控制目标区域的声压信号,分析降噪效果。试验条件见表1

图7 励磁机展开位置

表1 试验条件
结果分析
正弦信号激励当激励频率为60Hz时,最大噪声频率出现在60Hz,此外,内部的谐波出现在120和180Hz。同时,该系统几乎没有降噪效果,并且会有一定的声压级增强。原因是汽车附带的扬声器的低频特性相对较差,低于60 Hz的声学信号会有些失真。因此,降噪效果并不明显,存在一定的分歧。
当激励频率为90Hz和120Hz时,通过实验发现,在单频激励中,内部噪声和激励具有几乎相同的频率,并且会伴随倍频噪声。倍频噪声压力水平均低于基频噪声。单频信号在基频处的降噪可以达到30dB,并且可以几乎完全消除该频率处的噪声。然而,倍频噪声的噪声减少量很小。原因可能是倍频噪声信号可能被身体面板激发,并且前馈信号中的加速度信号不发生倍频。前馈信号与倍频的相干性很低,因此降噪效果很小。
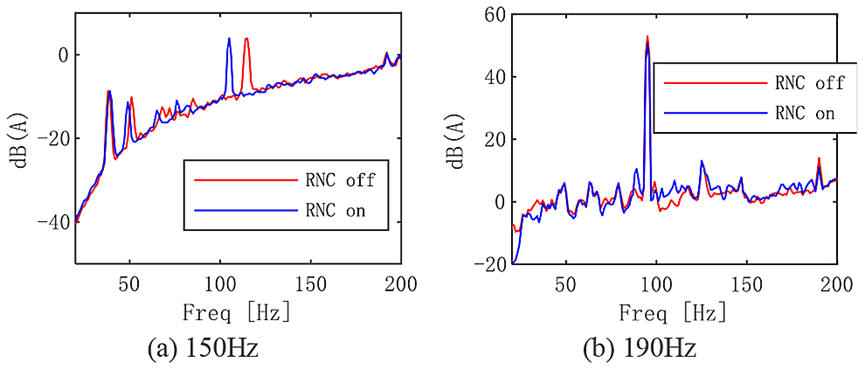
当激励频率为150Hz时,出现了许多奇怪的频率分量,如75Hz、100Hz和225Hz,这与其他激励频率不同。当系统打开时,没有噪音降低。同时,频率为225Hz的部分变为210Hz。当激励频率为190 Hz时,也没有降噪。
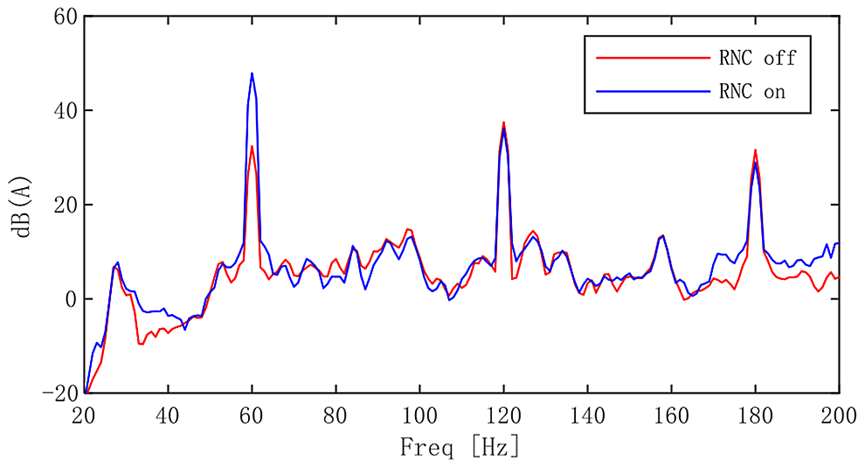
图8 励磁频率为60 Hz
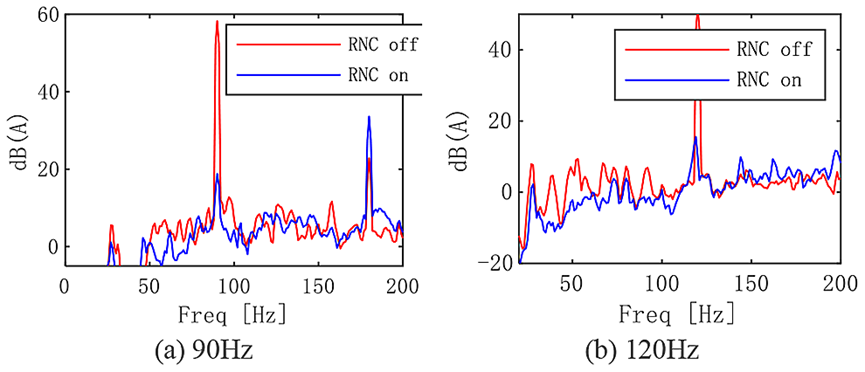
图9 激励频率分别为60 Hz和120 Hz
图10 励磁频率分别为60 Hz和120 Hz
当激励频率为150Hz时,出现了许多奇怪的频率分量,如75Hz、100Hz和225Hz,这与其他激励频率不同。当系统打开时,没有噪音降低。同时,频率为225Hz的部分变为210Hz。当激励频率为190 Hz时,也没有噪声降低。
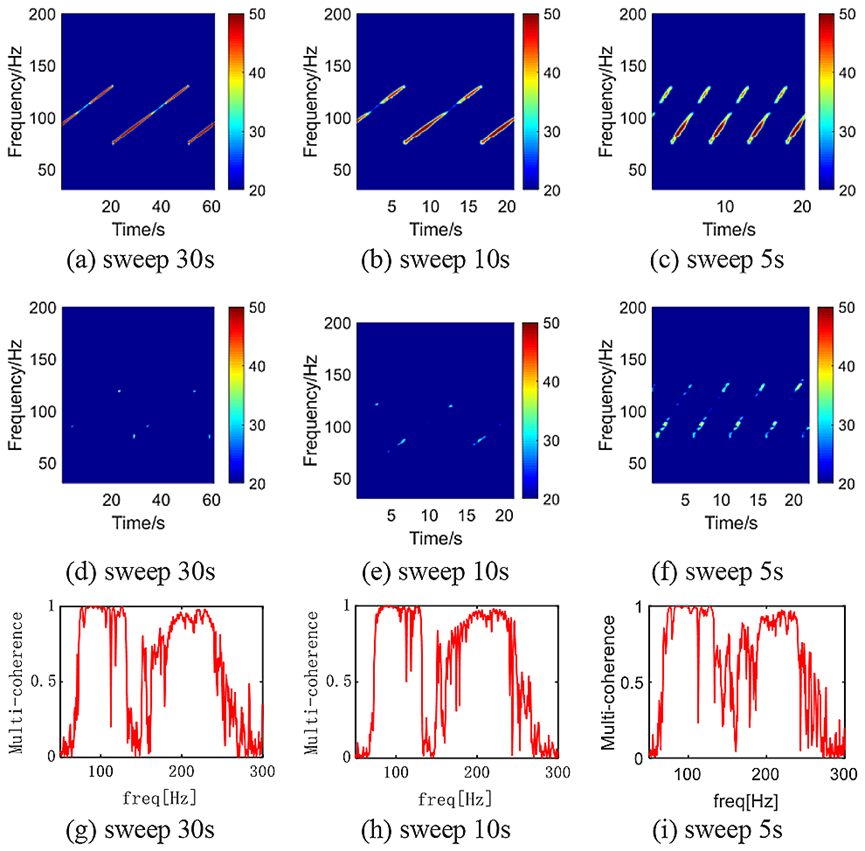
图11 激励频率为扫频信号,扫频周期设置为30s、10s和5s (a) ,(b)和(c),系统关闭。(d),(e)和(f),系统打开(g),(h)和(i),参考信号和误差麦克风之间的多重相干性
扫描信号激励:使用频率扫描信号激励工作条件,频率扫描周期分别设置为30s、10s和5s,频率范围为70-130 Hz。通过实验,我们可以发现,不同周期的扫描信号激发的噪声信号的幅度基本相同,并且频谱特性非常相似。当扫描周期为30s时,基本上可以消除噪声。当周期变为5s时,噪声降低大大降低。原因是当扫描周期较长时,该过程可以近似为稳态过程,因此系统的控制效果会更好。当扫描周期逐渐减少时,系统的随机性越来越大,降噪量也越来越小。
白噪声激励系统:由50-200 Hz的白噪声激励,系统的噪声频率也集中在50-200 Hz。通过实验可以发现,该系统在60-110Hz时的降噪效果明显,约为10dB。其他波段的影响很小,但没有差异。白噪声激励的效果明显比单频和扫频激励差得多,表明系统的实时性有待提高。
道路测试
试验条件:测试是在天气良好且无雨的环境中进行的。测试车辆状况良好,机油充足,轮胎压力正常。控制硬件平台与台架测试一致。测试条件是在光滑的沥青路面、粗糙的沥青路面和比利时街区道路上以恒定速度行驶。
图12 激励为50-200 Hz的白噪声
测试结果分析
粗沥青路面:从图13中可以看出,当车速不同时,噪声的频谱特征不同,但噪声的大小基本相同。当车速为40km/h时,噪声频率主要集中在70-100Hz和230Hz,最大道路噪声为59dB。当RNC系统打开时,将产生显著的降噪效果。在副驾驶员中,降噪频率范围主要集中在70-120Hz左右。最大降噪为8 dB,驾驶员头枕处的噪声在250-400 Hz之间略有增加,但增加幅度不大。当车速为60km/h时,噪声频率范围扩大,70-150Hz和230Hz的噪声能量相对较大。在副驾驶位置,100-150 Hz的噪声能量大于驾驶员座椅。当系统打开时,驾驶员座椅的降噪频带集中在70-120 Hz之间,最大降噪为9 dB,驾驶员头枕的降噪频带在250-400 Hz之间有所增加。前排乘客座椅的降噪量集中在70-150 Hz之间,并且没有噪音增加。
图13 试验条件为粗沥青路面(a)和(b)车速为40km/h (c) 和(d)车速为60km/h
比利时街区道路:噪声频率主要集中在70-140 Hz之间。与粗沥青路面相似,最大声压级为60dBA。当系统打开时,降噪频率也集中在70-140 Hz之间,最大降噪为6 dB。
平滑沥青路面:车速为60km/h,平滑沥青路面的初始噪音非常小,只有45dBA。噪声分布的频带相对均匀,没有特别突出的频率。当RNC系统打开时,系统的噪声降低主要集中在70-120 Hz之间。其他频带的噪声降低量很小,但没有发散

图14 测试条件为比利时街区道路 车速为60km/h
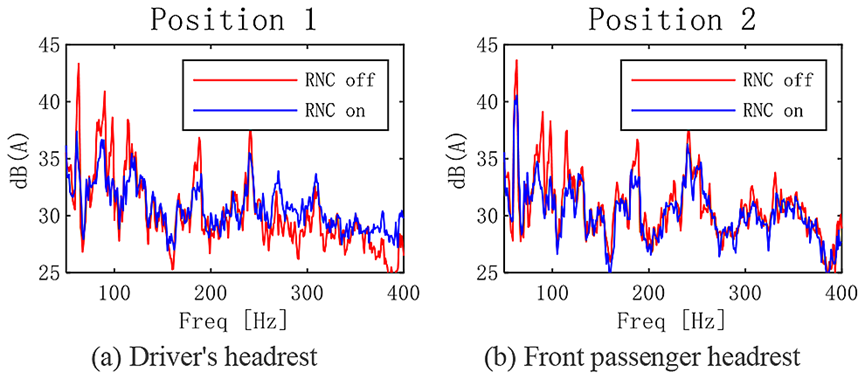
图15 试验条件为光滑沥青路面 车速为60km/h
结论
从实验结果可以看出,现有的RNC系统可以有效地控制车辆中的道路噪声。然而,在降噪和工作条件适应性方面仍存在一些问题。
对于前馈控制系统,当系统打开时,只有与参考信号相关的噪声可以被消除。因此,噪声和加速度信号之间的一致性程度越大,降噪效果越好。从扫频激励的台架试验可以看出,只有扫频不同,其他两个条件相同,噪声和加速度的相干性基本相同。然而,在不同的扫描周期下,系统的降噪效果并不相同,这表明系统的降噪除了与相干度密切相关外,还与外部激励的状态密切相关。在白噪声激励下,系统的降噪主要集中在70-140Hz之间。在140和200赫兹之间,噪声和加速度的相干性也很高,但降噪效果并不明显。这也将是我们未来研究的方向,以及残余噪声的影响因素是什么。在道路试验中,降噪频带主要集中在200Hz以下的低频部分。对于噪声幅度较大的频带部分,降噪效果更好,但对于噪声幅度较小的频带,基本上没有降噪。因此,需要改进算法和系统以寻求更宽的降噪频带和更高的降噪。
主动道路噪声控制系统的次要路径包括外围电路、内部声学室、扬声器和误差传感器。放大器扬声器系统和其他模拟电路组件受到温度和湿度的影响,其传输特性也会发生变化。同时,汽车内的声场传输特性将受到温度和湿度变化、气压波动、车窗打开和关闭条件、乘员位置变化、乘员服装声学特性变化,甚至内部附件变化的影响,这将最终导致自适应陷波的次级路径的改变。在传统的噪声主动控制系统模型中,通常只校准一个次级路径,因此次级路径的估计通常与实际次级路径不同,这将导致系统降噪量的减少甚至发散。通过适当的方法建立次级路径的精确模型是主动道路噪声控制系统的关键部分。在本文的实验中,200Hz左右的降噪量很小,这可能与次级路径的建模问题有关,这需要通过后续研究来证明。二级路径建模的方法包括离线建模和在线建模。在线建模方法是准确的,因为可以实时估计次级路径。然而,目前还存在一些问题,如研究相对较少,算法更复杂,鲁棒性较差。因此,降低算法的复杂性和提高在线建模系统的鲁棒性是未来的研究方向
本文从理论上分析了FXLMS算法的计算复杂性。为了分析该算法的降噪效果,进行了实车测试。首先,建立了道路噪声主动控制系统HIL平台和基于DASP的噪声测量平台。加速度信号被用作前馈信号,汽车扬声器是次级声源。使用FXLMS算法分别进行了台架激励试验和道路匀速试验。台架试验条件为单频激励、扫频激励和白噪声激励。测试结果表明,该系统对单频激励具有最佳的降噪效果,但对某些频率没有降噪效果。对于扫频激励,降噪效果与扫频周期有关。周期越大,降噪效果越好。对于白噪声激励,降噪频带主要集中在70-140Hz之间,这可能与次级信道单元脉冲响应有关。在路试中,当原始噪声较大时,系统会有一定的降噪效果,但降噪频带很窄。否则,系统具有一般的降噪效果。
从HIL测试可以看出,现有RNC系统在降噪性能和工作条件适应性方面需要改进。为了提高系统在不同工况下的降噪性能,有必要对多通道FXLMS算法的影响因素进行深入的理论分析
文章来源:Pi, X., Zhang, L., Meng, D., and Zhang, X., “Experimental Performance Analysis of Multi-Channel Active Control System for Road Noise in Vehicles Using FXLMS Algorithm,” SAE Technical Paper 2020-01-1277, 2020, doi:10.4271/2020-01-1277.



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
