




 广告
广告





















































车辆在环仿真系统在智驾开发中的应用

为保证自动驾驶车辆在各种道路交通状况和应用场景下均可以安全、可靠、高效地运行,必须在出厂前对自动驾驶车辆进行全面、系统和严格的测试。科学完善的测试与评价方法对提高自动驾驶汽车研发效率、保障交通安全、促进产业健康发展至关重要。虚拟仿真测试、实车测试和硬件在环测试是自动驾驶汽车测试的重要手段。其中基于软件的虚拟仿真测试方法具有成本低、测试效率高的优点,但在建立仿真模型时会忽略许多实际因素,不易保证仿真结果的准确性,也无法实现自动驾驶车辆硬件性能测试和标定。实车测试则主要分为封闭场地测试和道路测试2种测试方法。封闭场地测试具有较高的安全性,但是测试场景过于简单,且场地投资成本高;道路测试虽然具有丰富的测试场景,但是测试安全性较低,且无法穷尽所有交通场景。因此传统的汽车研发与出厂性能测试方法很难满足自动驾驶汽车的测试需求,如何在保证测试准确性和可靠性的先决条件下缩短自动驾驶车辆测试周期是行业当前重点关注的课题。近年来,基于硬件在环(HIL)的仿真方法在汽车测试领域受到了广泛关注和应用。HIL技术结合数学模型与物理硬件设备,在模拟车辆动力学及稳定性控制时引入重力、阻力、摩擦力等关键物理参数,用于提高模型置信度,对实际车辆进行仿真测试。与实车测试相比,该方法施工成本低,开发周期短,重现性良好。利用HIL仿真对自动驾驶车辆场景感知、路径规划、决策及控制算法进行闭环测试与评价,可将测试算法快速迁移到真实自动驾驶汽车上,但是并未将自动驾驶汽车的执行机构接入测试回路。整车在环(VIL)仿真是HIL仿真的一种特殊类型,VIL通过将自动驾驶系统集成到真实车辆中,并在实验室条件下构建模拟道路、交通场景以及环境因素,可系统地实现基于多场景的自动驾驶车辆功能与性能测试。
仿真测试平台结构
一种比较常见的整车在环仿真自动驾驶汽车室内快速测试平台由7个子系统组成,分别为:前轴可旋转式转鼓试验台、试验台测控子系统、虚拟场景自动生成子系统、虚拟传感器模拟子系统、汽车驾驶模拟器、自动驾驶汽车、测试结果自动分析评价子系统,如图1所示。整个测试平台采用基于C/S的系统架构,各子系统通过主控系统利用以太网相互通信。测试平台硬件逻辑结构如图2所示。
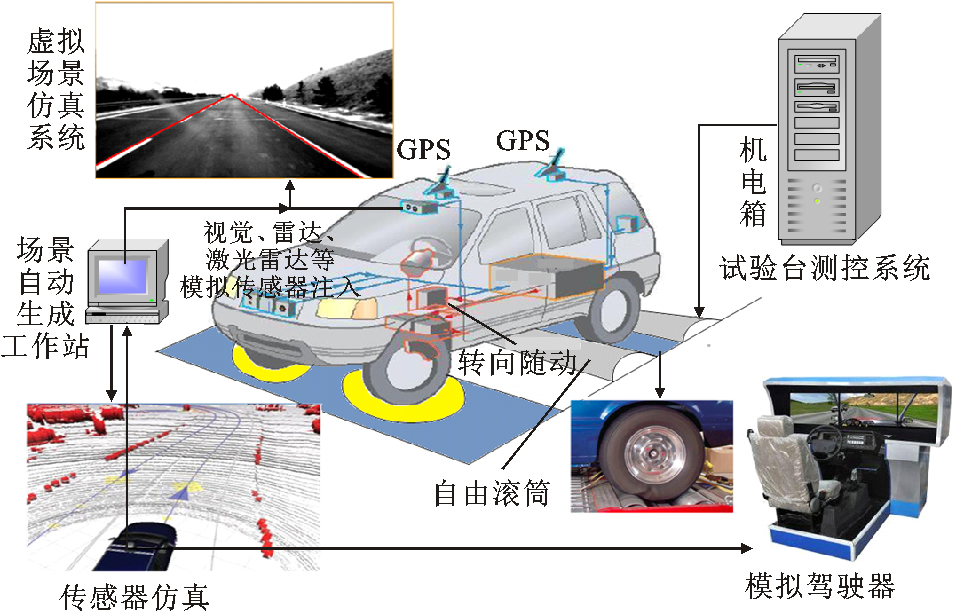
图1 测试平台硬件物理结构
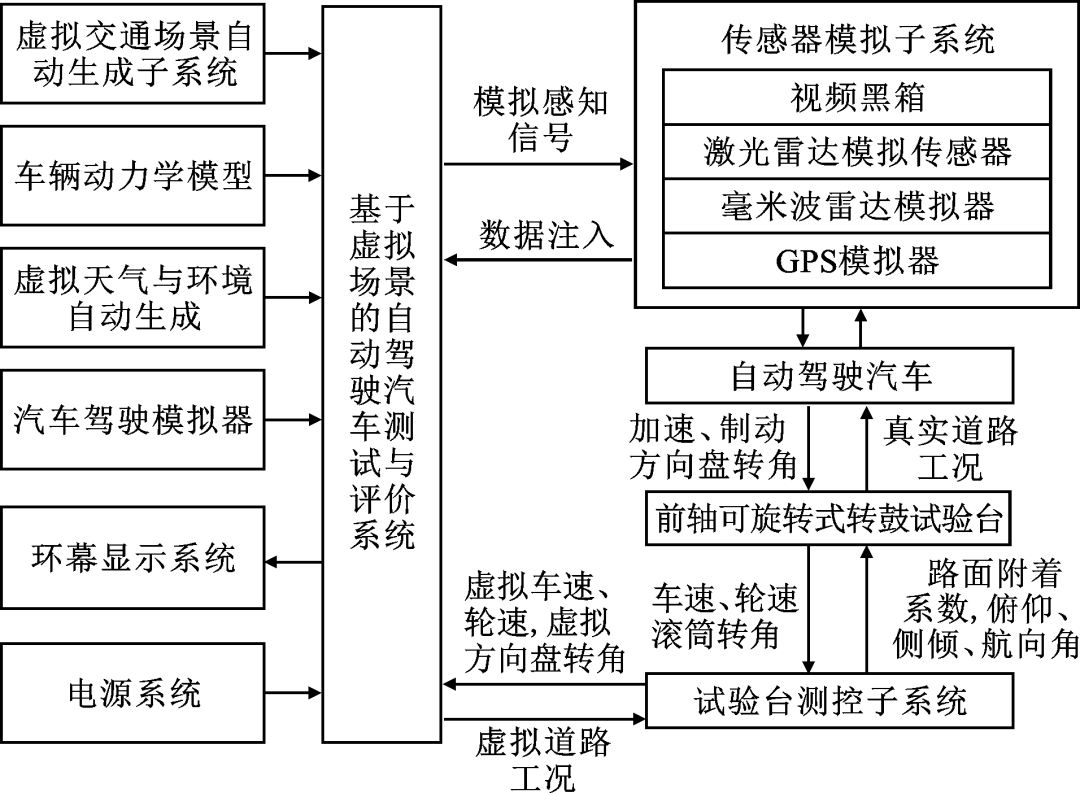
图2 测试平台硬件逻辑结构
测试平台软件功能
自动驾驶汽车室内快速测试平台软件功能如图3所示。在测试结束后,测试结果自动分析评价子系统计算测试过程中车辆的动作执行正确率,评价自动驾驶汽车决策执行的实时性、灵敏性、智能度、舒适性、经济燃油性等指标。图4和图5分别为整车在环仿真测试流程和传感器仿真流程。
注册标定模块主要用于录入车辆各项物理参数,并对测试车辆进行转向角标定和阻力模型标定,通过调整、优化转向系统和阻力模型中的控制参数,保证台架检测精度。
系统维护模块主要保存车辆相关测试信息,同时记录系统运行中的软、硬件日志文件,定期根据系统日志完成设备功能自检,确保测试平台高效运行。
试验台测控程序主要用于调试台架各执行机构的性能,为车辆技术功能测试及场地模拟测试提供设备保障,主要包括寄生功率校准、惯量测试、系统参数设定、信号标定、信号测试和查询统计。
车辆技术测试模块主要用于测试车辆各项技术状况、工作能力及使用性能,主要包括速度及相关测试、智能灯光测试、可变悬架测试、安全系统测试及自动驾驶辅助技术测试。
虚拟场景设置模块是通过在虚拟场景中调整天气及光照、布设道路标识以及模拟障碍物从而为自动驾驶汽车测试提供丰富的场景用例。
场地模拟测试模块可以复现多种典型的道路交通场景,为自动驾驶汽车提供多种模拟的道路工况、交通环境和交通事件,主要包括车道线识别、自动加速与制动测试、信号灯识别与响应测试、特殊道路测试、路口通行测试、道路进出口测试、障碍物识别与响应测试、标志物识别与响应测试和综合路况测试。
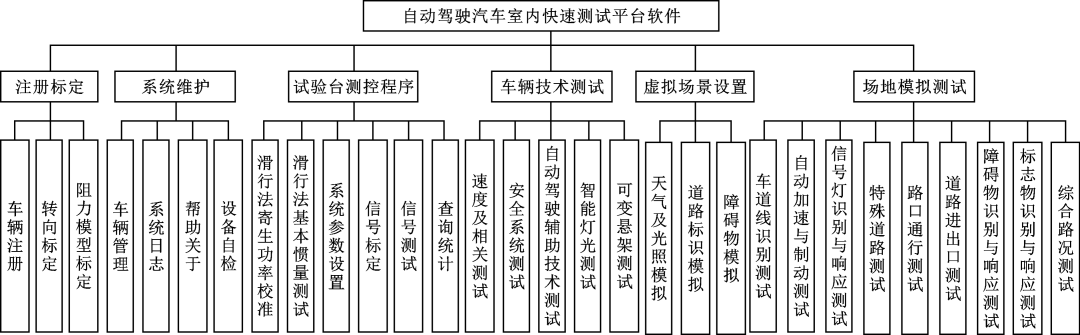
图3 自动驾驶车辆测试软件功能模块
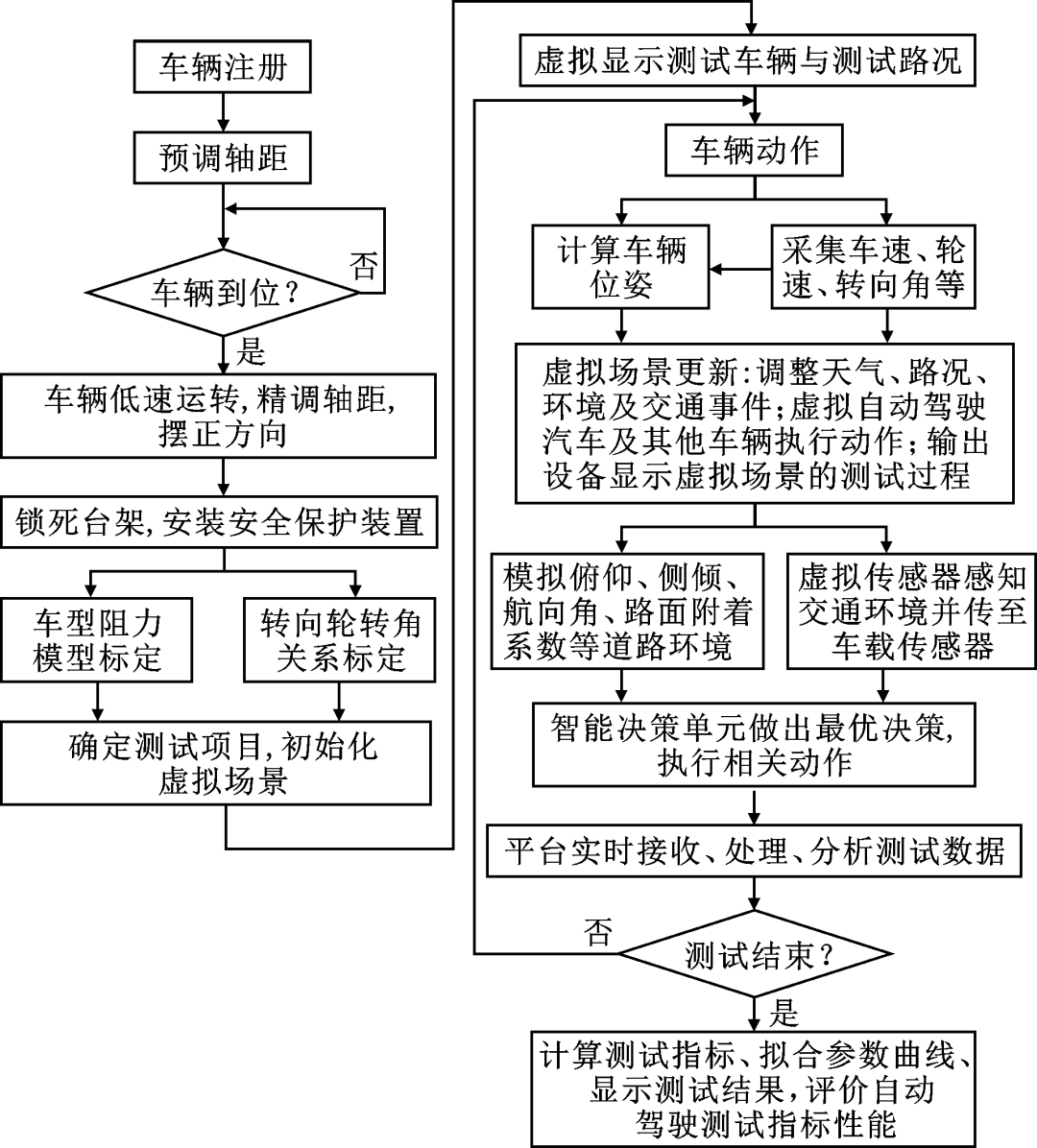
图4 自动驾驶车辆整车在环仿真测试流程
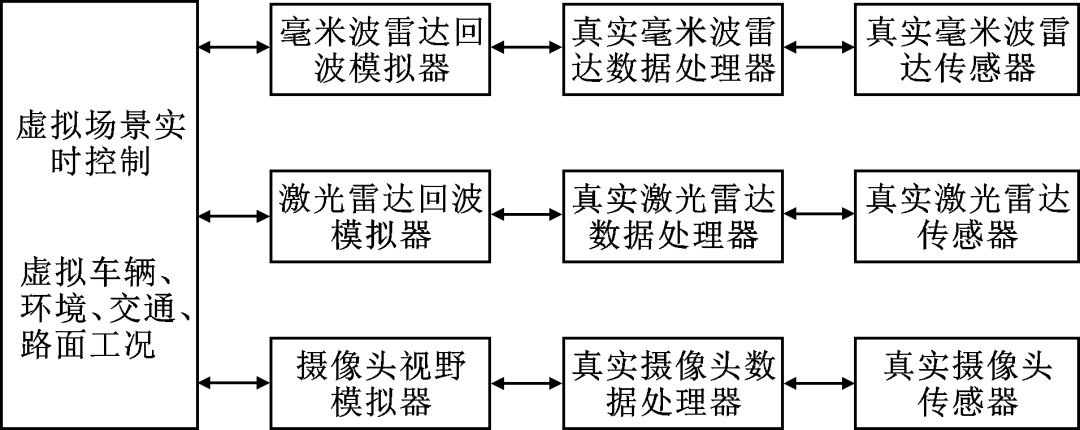
图5 传感器HIL仿真流程
虚拟测试场景自动重构方法
测试场景是开展自动驾驶汽车测试评价的重要前提,基于场景的自动驾驶汽车测试方法是实现加速测试、加速评价的有效途径。由于真实交通场景复杂多变,场景特征要素需求尚未清晰,难以实现测试场景全覆盖。因此,基于道路交通规则和交通安全现状,需要结合典型的道路交通情景、道路交通事故、道路交通违法等真实驾驶场景,设计一种测试场景自动重构方法,通过解构真实场景并自由多种组合场景要素从而构建更丰富的测试场景。

图6 场景自动重构技术路线
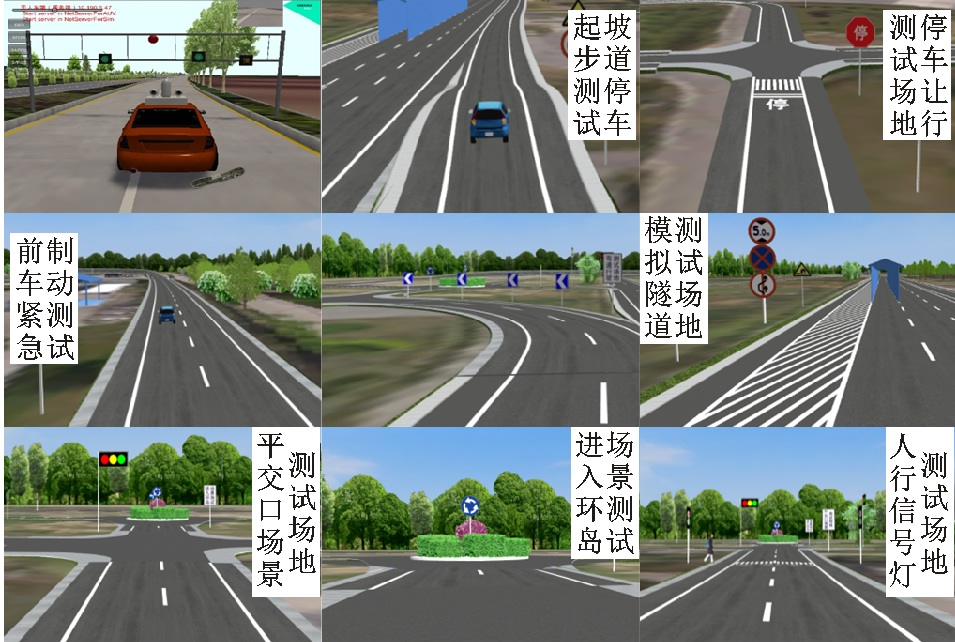
图7 自动驾驶虚拟仿真测试场景
2022mathworks中国汽车年会演讲
随着智能驾驶技术的不断发展,为保证智能驾驶车辆的舒适性与安全性,在智驾系统开发中需进行大量的测试验证,车辆在环系统(vehicle-in-the-loop, VIL)因场景搭建便捷、车辆动力学真实等特点被广泛采用。本次演讲将分享基于RoadRunner、Simulink和Speedgoat的车辆在环工具链的应用案例。以下是本次演讲的主要内容:1.智驾开发测试系统分析:智驾测试系统中MIL、SIL、HIL、DIL、VIL、Real测试系统的特点及差异。2.车辆在环测试系统的优势a.场景搭建便捷:应用Driving Scenario Designer、RoadRunner快速搭建仿真场景。
b.车辆动力学真实:应用Speedgoat快速原型建立实时仿真系统。
3.车辆在环测试系统的难点
a.实车运动学参数与仿真车辆参数的映射关系:实车与仿真车辆间位姿转换模型建立,实现WGS坐标—>SIM坐标转换。
b.车辆在环测试系统中的接口设计:感知与规控的接口匹配以及规控与实车间的接口适配。4.车辆在环测试系统的局限:感知模型置信度优化、交通流模型置信度提高。5.基于MATLAB车辆在环测试系统设计:系统架构设计、仿真场景搭建、模型接口调试、实时系统验证。6.车辆在环测试系统应用案例:ACC场景应用实例、LDW场景应用实例、APA场景应用实例。
- 下一篇:详解智能网联汽车技术与经济评价体系
- 上一篇:何鹏林:国际国内锂钠电池标准化最新动态



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
