




 广告
广告





















































面向L4的车路协同自动驾驶服务策略

结合L4自动驾驶系统总体架构,同时考虑到L4自动驾驶车辆的受控度,VICAD可以深度参与L4自动驾驶从感知到决策规划和控制的全部过程,为L4提供全方位支撑服务(如图3.1),具体包括以下四个方面:1)通过车路协同感知解决自动驾驶感知长尾问题:发挥路端和云端感知优势,与CAV进行协同感知,解决超视距、盲区、遮挡等一系列感知长尾问题;2)通过车路协同感知和地图动态更新解决自动驾驶地图实时性问题:在车路协同感知的基础上,还可以通过分钟级自动驾驶地图更新,帮助CAV应对交通标志标线、信号灯等一系列自动驾驶地图要素变更带来的问题;3)通过车路协同决策规划解决全局路径优化、混行冲突及阻塞问题:通过车路协同路径规划(Routing),为CAV提供全局路径规划服务;通过车路协同行为决策(Decision)与运动规划(Planning),解决自动驾驶博弈、阻塞等典型混行场景问题;4)通过车路协同控制解决复杂特殊场景问题:针对自动驾驶复杂特殊场景,例如“脱困”、泊车等,可以通过VICAD直接控制CAV,帮助CAV成功应对这些场景,降低安全风险;针对复杂无序交通环境,还可以通过车路协同控制对交通基础设施、交通运行状况等进行有效干预和控制,优化自动驾驶整体交通环境,间接控制CAV,为CAV营造安全、简单、秩序化的交通环境。

图 3.1 VICAD加速L4实现无人化自动驾驶落地路径需要说明的是,VICAD并不是要完全取代车端的自动驾驶系统,而是同时运行在路端和云端的自动驾驶系统,发挥路端和云端的优势,为L4 CAV提供互补、冗余和强化三个层次的支撑和促进作用:(1)互补:以感知为例,AD存在感知范围有限、易被遮挡、受环境和光线影响较大、难以预测等不足,而路端和云端感知可以充分发挥感知范围广、长时间连续观测、容易工程化等优势,与车端感知进行感知互补,实现遮挡、超视距、动静态盲区等协同感知,从而提升车辆的感知能力。以定位为例,AV已经采用了多种方式进行高精度定位,但是在长隧道、地下、桥梁、高大建筑物遮挡等环境行驶时,经常出现定位信号缺失或定位不准的问题,路端通过感知定位、特征定位、UWB定位、C-V2X定位等多种定位方式,可以为车辆提供定位互补,辅助车辆实现高精度定位。再以路云协同决策规划和控制为例,单车智能自动驾驶车辆遇到复杂交通环境和驾驶场景时,容易出现急刹或被迫接管行为,通过路端或云端的协同决策和控制,可以为车辆重新规划路径,帮助车辆安全通过复杂场景。互补的关系示意见图3.2。
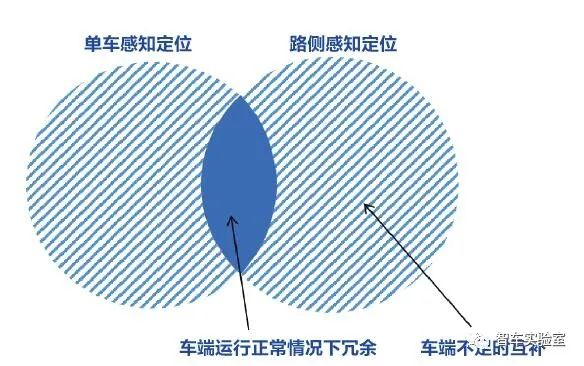
图 3.2 感知定位互补和冗余作用示意图(2)冗余:仍以感知和定位为例,车辆在开阔环境下行驶时,车端感知和定位功能正常运行,路端系统对车辆周围环境同时进行检测识别与定位,或者通过转发RTK定位信息,辅助车端进行融合定位,此时路端起到了冗余的作用。冗余的关系示意见图3.2。(3)强化:如图3.3和3.4所示,以交通信号灯识别为例,AD模式时,需要通过车端光学传感器在3D空间中识别定位到较远处的交通信号灯灯色,并且预测相位灯态变化,会面临一系列难题,比如炫光、尾灯霓虹灯干扰、LED频闪、灯亮度达标延迟、损坏和老化、移动式红绿灯的位移、欧美悬挂式灯的晃动、多相位匹配、超视距、盲区、动静态遮挡、异常天气等场景中的感知难题;而在VICAD模式下,可以通过路端系统或设施与低复杂度信号控制机对接信息,不仅可以实时通过低码率编码获得准确可靠的信号灯态语义信息,还可以超视距获得灯态信息以及倒计时等信息,此时路端和云端起到了强化和提升的作用。

图 3.3 道路中不同的信号灯形态
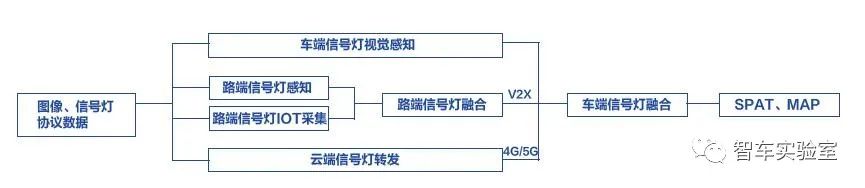
图 3.4 VICAD信号灯强化感知作用示意图节选自《面向自动驾驶的车路协同关键技术与展望2.0》
- 下一篇:让自动驾驶更安全,远高于人类驾驶水平
- 上一篇:车路协同自动驾驶发展现状与趋势



编辑推荐




最新资讯
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
-
基于不同控制算法的半主动悬架仿真研究
2025-04-11 10:20
-
不允许起火爆炸,GB 38031《电动汽车用动力
2025-04-11 10:15
