




 广告
广告





















































让自动驾驶更安全,远高于人类驾驶水平

安全是自动驾驶发展的基础,也是现阶段自动驾驶首先需要重点解决的问题。根据自动驾驶SOTIF理论,如图3.5所示,自动驾驶运行场景总体上可以分为4类,其中区域1为已知安全类场景、区域2为已知不安全场景、区域3为未知不安全场景、区域4为未知安全场景。VICAD对自动驾驶安全的核心目标是将自动驾驶“未知”场景转化为“已知”场景,将“不安全”场景转化为“安全”场景。即重点解决区域2和区域3中的场景问题,将区域2转化为区域1,并证明区域2的残余风险足够低;针对未知不安全区域3,VICAD将区域3转化为区域1、2或4,尽量减少区域3中的场景,保证区域3的风险控制在合理可接受的水平。
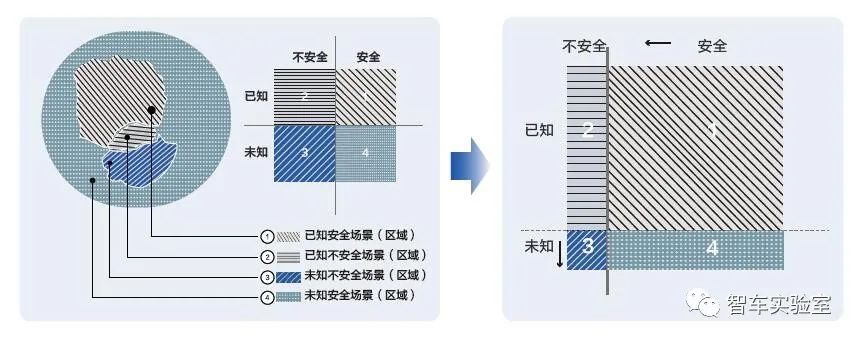
图 3.5 自动驾驶SOTIF安全目标3.2.1 将“未知”场景转化为“已知”场景SOTIF“未知”场景的探索是一个行业难题,“你永远不知道不知道什么”。VICAD可以充分发挥车端、路端和云端协同感知优势,通过持续数据驱动和算法学习提升系统的认知能力,发现未知场景,并通过车路协同感知、高精度地图实时更新等方式,将“未知”场景转化为“已知”场景,降低自动驾驶安全风险。3.2.1.1 车路协同感知定位实现“未知”到“已知”(一)总体技术原理车路协同系统的车端、路端和云端同时具备感知能力,都可以作为主车的感知信息源,如图3.6所示,主车周围车辆可通过V2V方式进行感知共享,路端感知系统和设施可通过V2I进行感知共享,云端平台也可以发挥数据优势,通过V2N方式进行数据共享,所有感知数据汇聚在车端进行融合处理,得到最终感知结果信息。
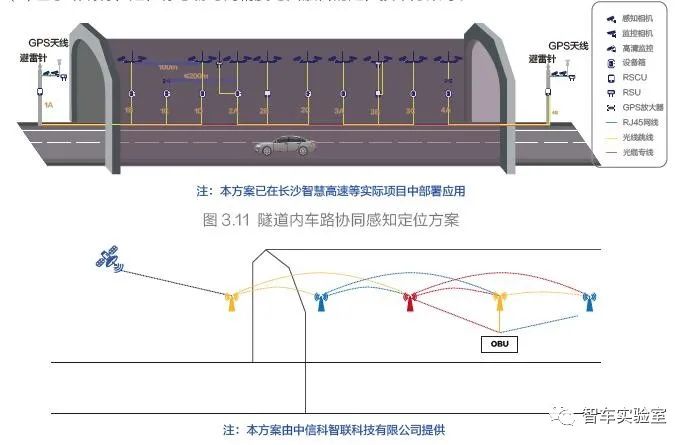
图 3.6 协同感知示意图车路协同感知的优势主要体现在:1)路端传感器可选择性多,可实现多方位、长距离连续部署;2)路端和云端可通过移动蜂窝接入、有线接入等差异化方式获取数据,突破视觉感知认知瓶颈问题(比如信号灯数据采集),可以有效降低算力投入;3)路端和云端可通过长时间连续检测,提高对复杂环境、交通事件、交通态势的语义判断和理解认知,实现对各类交通事件(“死车”、排队、施工、遗撒等)实时准确感知识别。路端多传感器进行融合感知的策略可以是前融合,也可以是后融合,一种路端后融合感知的框架和流程见图3.7,包括以下主要步骤:1)数据容器:数据容器提供了自适应参数、多种消息回调及支持热插拔的接口,通过内置的参数和地图将所有传感器消息、车端/路端/云端消息转化成统一的消息格式,并向下游输出;2)数据关联:对数据容器中的信息进行采样处理时,会对所有信息按照触发时间进行排序匹配,将混乱的位置变成时序状态估计。在每一次匹配前,都会根据数据的属性及其误差计算协方差,作为匹配边距离。经过若干次匹配后,将结果分组打包传递给状态估计模块;3)状态估计:状态估计模块会对每组信息进行时序相关的处理,再分别送给针对静止和运动物体建立的不同滤波器;4)状态预测:滤波器的预测状态经过地图和模型的处理后,生成短时间的预测消息输出,同时回送到数据关联模块,与下一次的传感器结果进行关联,形成时序的跟踪;5)结果输出:向外输出最终融合感知结果信息,包括位置、速度、加速度、航向角、置信度等参数。
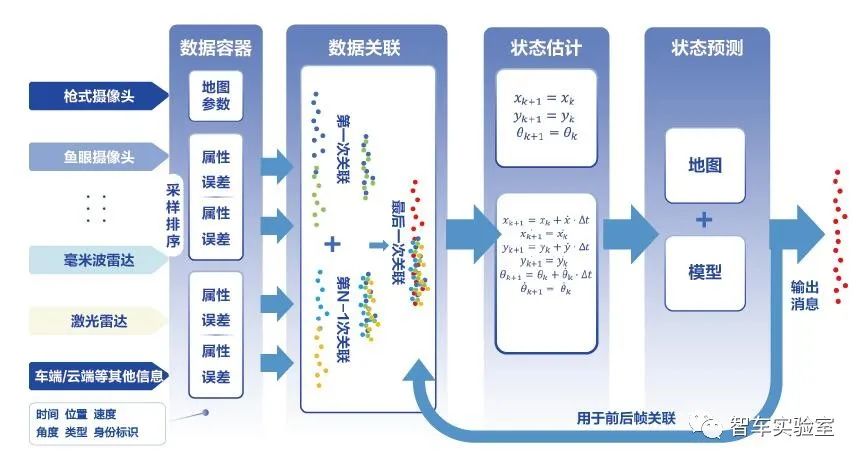
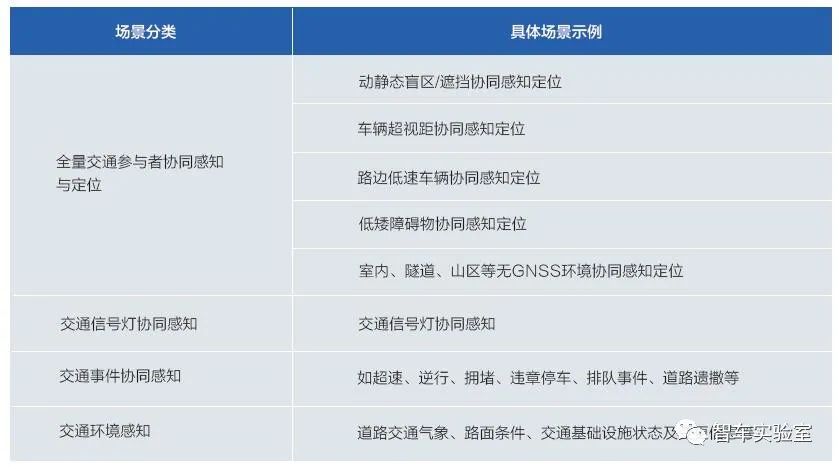
图 3.7 路端多传感器后融合感知定位框架车路协同感知适用的场景见表3.1。表 3.1 车路协同感知类应用场景举例
- 下一篇:将“不安全”场景转化为“安全”场景
- 上一篇:面向L4的车路协同自动驾驶服务策略



编辑推荐




最新资讯
-
Rivian与MAE合作定制电动车测试设备安装项
2025-04-10 14:41
-
重型商用车辆和客车的动力学——操纵性
2025-04-10 14:40
-
新能源汽车VCU、BMS、MCU控制器图解
2025-04-10 14:39
-
陶琳回应电动车辐射高:特斯拉辐射值远低于
2025-04-10 13:14
-
nCode2025版本发布说明
2025-04-10 13:12
