




 广告
广告





















































让自动驾驶更安全,远高于人类驾驶水平


图 3.8 人行横道过街安全礼让

(三)协同感知典型场景举例2:无/弱GNSS环境下协同感知定位问题描述:自动驾驶车辆在开阔环境行驶时,可以通过GNSS+RTK提供绝对定位信息,IMU+轮速+方向盘转角提供相对定位信息,并在此基础上结合高精度地图和观测类传感器匹配定位结果进行多传感器融合定位;但当自动驾驶车辆行驶在桥隧、地下、山区等无/弱GNSS信号环境时,没有有效的绝对定位信息输入,导致无法实现高精度定位。场景原理:通过车路协同可以有多种方式解决自动驾驶在上述环境行驶所面临的定位问题:(1)路端多传感器融合感知定位:技术实现原理同图3.7,路端融合感知定位信息与车辆动静态特征信息进行匹配,可得到车辆实时高精度位置信息,该方案在隧道的实际部署应用效果如图3.11所示;(2)基于超宽带UWB或LTE PC5的辅助定位技术方案:如图3.12所示,在路端部署无线定位基站/Anchor和GNSS信号放大器,通过预先的位置标定,确定每个近场无线定位基站/Anchor的绝对位置,GNSS信号放大器用于无/弱GNSS信号环境下车、路的主时钟授时;车端加装无线定位接收机/Tag,接收带有绝对时间信息的近场无线定位信号,并进行定位信息解算,得到较高精度定位信息;(3)基于路端特征定位标志物与高精度地图融合的定位技术方案等。
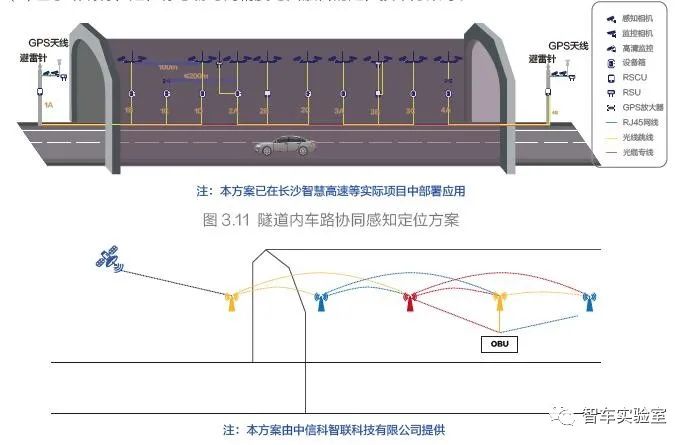
图 3.12 隧道内基于LTE PC5车路协同定位方案应用效果:通过综合运用车路协同感知定位、超宽带UWB、LTE PC5、特征定位等多种方式,解决自动驾驶在长隧道等无/弱GNSS信号环境下的高精度定位问题,实现从“未知”到“已知”。3.2.1.2自动驾驶地图实时更新实现“未知”到“已知”自动驾驶地图(业界也有称为“高精地图”或“高清地图”)是自动驾驶的关键支撑要素之一,现阶段自动驾驶地图比较常用的制图以及更新的方式有两种,一种是利用专业测绘设备进行集中数据采集后制图及更新,一种是利用车载传感器进行众包数据采集后制图及更新。当前业界在初始建图方面,能够在完整性和精度上,基本满足高等级自动驾驶的需求,但在地图的鲜度维护方面,存在难以解决的问题。(1)通过专业的高精度测绘设备更新:是指采用专业采集设备,定期对存量地图覆盖范围进行采集、制作。这种方式一般有人工制图的参与,所以可以对全要素的地图进行更新,是目前主要的地图更新方式。但这种方式需要专业的采集设备,成本高、数量少,对于大范围地图的采集和制作更新成本高、周期长,难以满足自动驾驶对地图实时更新需求。(2)众包地图更新:是指依赖量产车车端搭载的智能摄像头或高级辅助驾驶系统的实时感知和定位能力,对交通环境进行不定期的重复扫描,云端通过收集的采集数据在线成图,并与底图进行差分,从而实现更新。凭借公开道路上的海量车载终端进行众包更新,为高精度地图实时更新提供了可能性,但是众包更新难以完全支撑高精度地图的实时更新,主要原因是:
-
存在“车辆首次通过的天花板”,即现实道路变化后车辆首次经过时的地图失效问题。
-
量产车车端算力、定位精度有限,需要采用在一段时间内的多次采集信息进行聚合生成高置信度结果然后进行地图更新。
-
车端传感器数据上传至云端进行建图工作,过程中需要占用较大的通信资源,数据流量费用较高,另外传感器原始数据的公共网络传输会对国家地理信息安全造成重大隐患。
高等级自动驾驶对自动驾驶地图实时更新存在迫切需求,因为车辆在行驶过程中周围环境是动态变化的,比如道路结构(封路、新建道路)、道路附属设施(比如道路标志标线、标志牌、交通信号灯等)或交通运行状况(交通管制、道路施工等),会造成车端地图与现实交通环境存在不一致,影响自动驾驶的正常运行。不管是通过专业高精度测绘设备还是车端众包获取地图更新数据,目前都无法完全解决自动驾驶地图实时更新问题,存在较高概率的“未知场景”问题。
(一)总体技术方案
为解决上述问题,本文在行业常用的地图更新方式之外,提出基于车路协同的自动驾驶地图实时更新方式——路端局部动态地图更新。路端局部动态地图更新的原理如图3.13所示,通过路端智能设施进行高频率的定点观测,实时发现动静态地图要素的变更情况,并更新覆盖范围内的地图,发送给车端和图商,与当前使用的地图版本进行要素级的融合更新。
相较于专业测绘地图更和车端众包地图更新方式,路端局部动态地图更新有如下优势(具体比较见表3.2):
-
定点观测数据精度高、可靠性强:路端传感器在安装部署时,可通过精确的内外参标定,以及多传感器融合感知定位,实现厘米级位置精度检测。同时对于需要周期性观测获取的经验类型的地图数据,路侧作为定点连续观测单元,更具有优势(如图3.14)。
-
实时性强:利用路端毫秒级感知,以及分钟级地图制作,为地图分钟级更新提供了保障支持,与传统更新相比,具有明显优势。
-
可识别的地图动静态要素信息丰富:路端不仅可以识别重要的静态和半静态地图要素信息,还可以识别半动态、动态的地图要素信息。
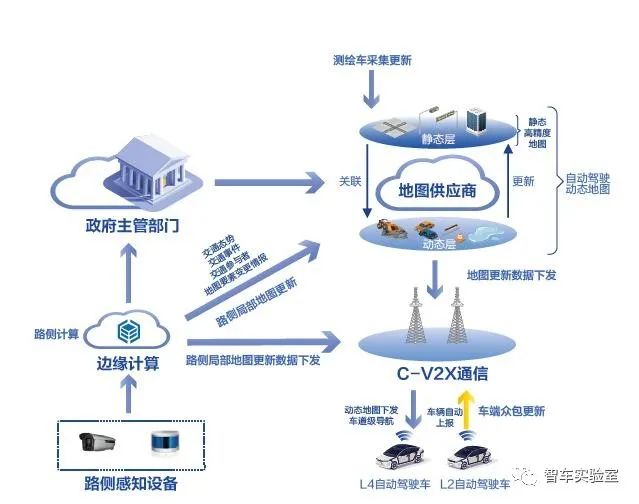
图 3.13 路端局部动态地图更新总体原理表 3.2 三种地图更新方式比较
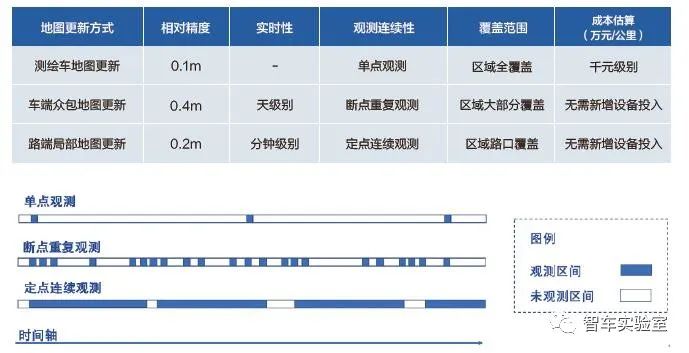
图 3.14 三种观测连续性比较示意图通过路端局部动态地图更新实现自动驾驶地图动态更新的过程包括两个主要步骤:(1)自动驾驶地图动态更新如图3.15所示,自动驾驶地图总体上分为静态图层和动态图层两类,其中静态图层可以粗略分为静态图层和半静态图层,动态图层可以粗略分为半动态图层、动态图层(也可根据具体需求划分成更多图层)。如表3.3所示从下到上图层不仅对数据实时性的要求是不同的,对数据的连续观测周期要求也不同,对于需要连续观测周期和高频周期获取的信息(例如路口合理的左转引导线,未知原因的道路阻塞点,未知原因的低速行驶区间),基于路端感知的地图更新方式才更有优势。

图 3.15 动态自动驾驶地图图层划分

- 下一篇:将“不安全”场景转化为“安全”场景
- 上一篇:面向L4的车路协同自动驾驶服务策略



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
