




 广告
广告





















































让自动驾驶更安全,远高于人类驾驶水平

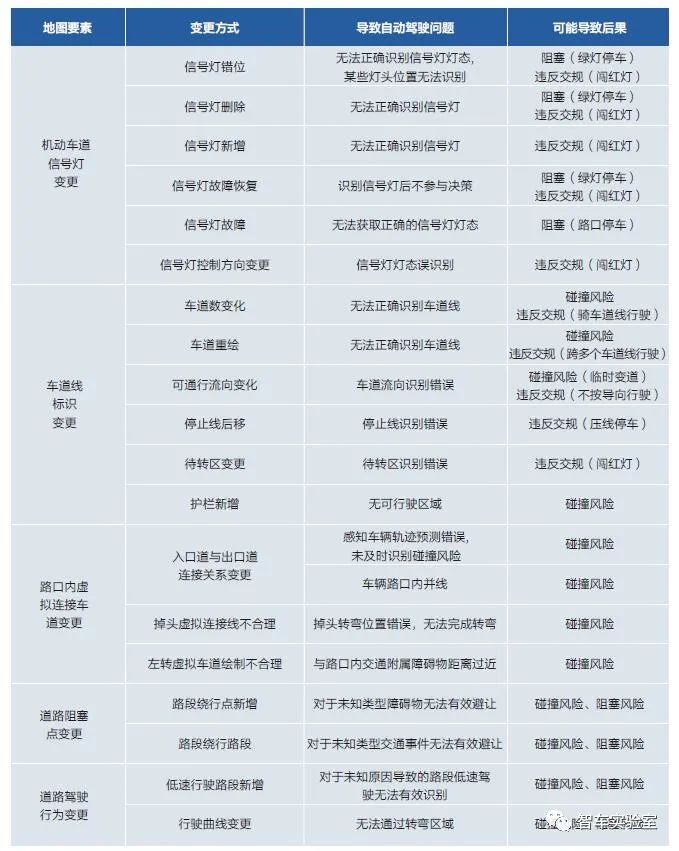
(1)实体类的地图要素变更,包括信号灯变更(机动车道信号灯、非机动车道信号灯、行人信号灯等)、道路标志标线变更(车道边界线、车道行驶方向、停止线、左转/右转待行区等)、交通设施变更(如栅栏/隔离柱)。(2)经验类的地图要素变更,包括路口内车道连接线的变更(如直行、左转、掉头连接线)、道路阻塞点变更、道路驾驶行为变更。因此,通过路端局部动态地图更新方式,可以解决当前自动驾驶由于地图要素变更引起的绝大多数人工接管问题。(2)地图更新实时下发更新的地图数据最终需要下发到车端并作用于车端决策规划,才能有效发挥地图的价值。目前地图的下发渠道、下发内容、下发形式多种多样,在下发的过程中同时还有跨图商、跨车企、跨模组无损且安全的信息流动的诉求。利用路端作为统一的信息发布渠道,采用地图参考位置协议(详见附录A)的方式发送与图商地图版本解耦的局部动态地图数据,是保证车辆数据实时性、有效性的一种重要方式,同时对于图商也可以利用路端信息进行版本级地图更新。
(二)地图实时更新典型场景举例与比较分析
下面以常见的信号灯变更和车道线变更为例进行说明。
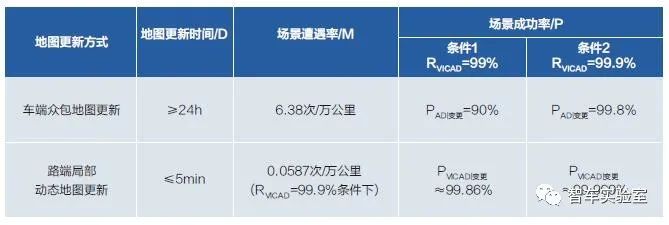
通过对多个智能网联示范区的长期观测统计,可知自动驾驶车辆在实际道路行驶时,会有较高概率遇到道路现实变更场景(比如道路信号灯、车道线、标志标牌等),每万公里遭遇道路现实变更的次数MAD约为6.38次/万公里(其中信号灯变更次数5.5次/万公里,车道线变更次数0.78次/万公里),这类场景会直接影响自动驾驶车辆的安全运营,需要通过有效手段快速解决。下面对众包地图更新和路端局部动态地图更新两种典型地图更新模式进行比较分析。(1)车端众包地图更新模式在众包地图更新模式下,地图完成现实变更的更新时间DAD,由于需要积累多趟、多车道数据才能完整重建,一般需要天级别(≥24h)的数据积累,云端才能完成地图的更新下发,因此众包地图更新模式下可定义地图更新周期DAD=24h,假设自动驾驶车辆每天的运营时间TAD=10h。那么该模式下遭遇地图要素变更场景的概率通过长时间的运营观测可以从两个层面得出:单车每万公里里程遭遇该场景的概率:MA D= 6.3次/ 万公里,单车每天遭遇该场景的概率:NAD=1.7次/车·天。该模式下车辆遭遇地图要素变更场景的通过成功率仅依赖于单车的能力,定义地图要素变更场景通过成功率为PAD|变更,PAD|变更的具体值应结合车辆的实际能力,并由大量实测结果确定。(2)路端局部动态地图更新模式依靠路端感知优势,道路交通要素在变更完成后可在云端短时间内完成地图重建和车端更新,将总的更新时间定义为D VICAD,保守按5min计算,那么:D VICAD=5min同时假设通过车路协同感知实现地图更新的场景召回率R VICAD=99.9%。那么该地图更新模式下自动驾驶车辆遇到变更场景的遭遇率M VICAD和N VICAD为:MVICAD=MAD×(r+(1-r)×(1-RVICAD)=0.0587次/万公里NVICAD=NAD×(r+(1-r)×(1-RVICAD)=0.00159次/车·天场景成功率方面,运营时间内发生一次地图要素现实变更时,若地图要素变更场景发生时刻为t1,有车辆在t2时刻途经该点,则在t1至min(TAD,t1+D)时间窗口内,车辆受到场景的环境影响,通过成功率为PAD|变更,在时间窗口前,车辆通过成功率为PAD|变更=1,时间窗口后车辆若完成更新,成功率恢复为PAD|变更,那么:引入局部动态地图更新后的场景通过率:根据大量自动驾驶车辆的测试和运营数据,可以进一步计算得出:假设AD模式下地图要素变更场景通过成功率:PAD|变更=90%,路端局部动态地图更新模式下变更场景召回率:RVICAD=99%,可得PVICAD|变更≈99.86%。若AD模式下场景通过成功率:PAD|变更=99.8%,路端局部动态地图更新模式下场景召回率:RVICAD=99.9%,可得 PVICAD|变更≈99.999%。(3)收益评估分析综上所述,路端局部地图更新模式具有显著收益,见表3.5,具体如下:1)地图更新时间方面:D VICAD小于等于5min,地图更新时间大幅缩短;2)地图要素变更场景的遭遇概率明显降低:RVICAD=99.9%情况下,场景遭遇率可从6.38次/万公里降低至0.0587次/万公里;3)场景通过成功率P得到显著提升:在PAD|变更=99.8%,RVICAD=99.9%情况下,PVICAD|变更甚至可达到理想的99.999%,场景的失败率从1.26次/百万公里降低到0.0063次/百万公里。表 3.5 地图要素变更场景下VICAD收益分析
节选自《面向自动驾驶的车路协同关键技术与展望2.0》
- 下一篇:将“不安全”场景转化为“安全”场景
- 上一篇:面向L4的车路协同自动驾驶服务策略



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
