




 广告
广告





















































将“不安全”场景转化为“安全”场景
2022-12-24 16:20:46· 来源:汽车测试网

图 3.18 自动驾驶感知、决策规划与控制总体流程示意图(1)动态路径规划动态路径规划是指自动驾驶车辆在行驶过程中,通过融合标准路网地图、高精度地图、车道级交通态势、车道级交通事件等信息,不断修正和优化行驶路径,实现路径的实时优化,在保证安全的前提下,最大化提升交通出行效率。如图3.19所示,车辆从起点开始,在行驶过程中,地图会给出从车辆所在位置到终点的推荐路径,自动驾驶车辆可根据实际需求(如时间最短、交通场景最简单)选择最佳路径。
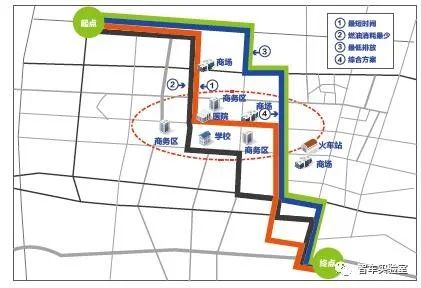
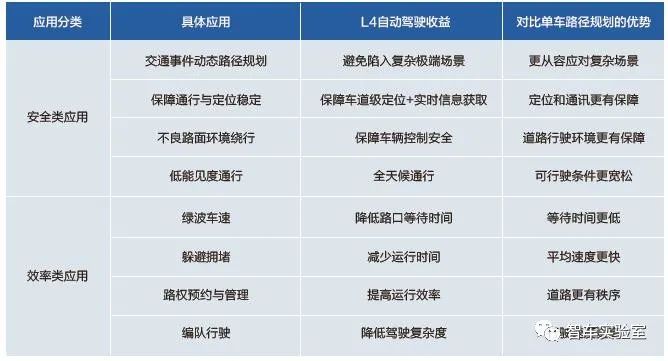
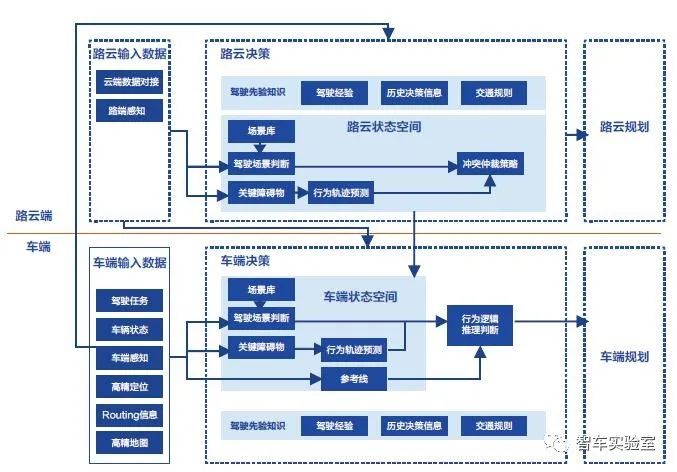
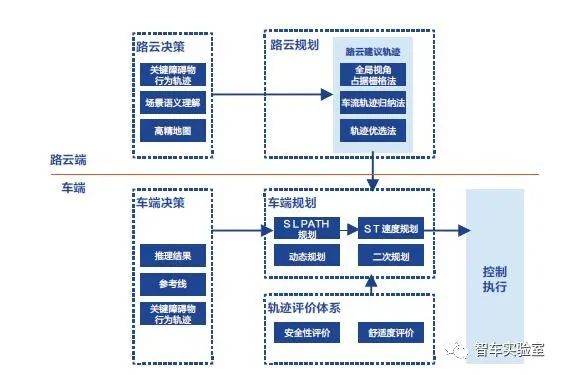

图 3.19 自动驾驶动态路径规划总体技术原理动态路径规划对于拥堵路口躲避、占道施工绕行、车辆动态编队等应用场景,具有明显优势,其他相关应用场景见表3.7。
表 3.7 动态路径规划可在L4自动驾驶中的典型应用(2)协同决策规划协同决策规划可分为协同行为决策与协同运动规划两个步骤。车路协同行为决策的总体流程见图3.20。在特定的驾驶任务中,基于车路协同感知、高精度定位及全局路径规划输入信息,完成驾驶场景的分析判断及关键障碍物行为轨迹预测,同时结合交通规则、历史决策信息、驾驶经验等驾驶先验知识,利用决策理论(如马尔可夫决策过程)在决策空间集合中给出最优化车辆行为决策判断。
图 3.20 车路协同行为决策(Decision)流程车路协同运动规划总体框架见图3.21。基于驾驶舒适度评价、可达性评价、安全性评价、通行效率评价等轨迹评价体系,结合最优行为决策结果数据,给出最优轨迹规划结果,供车辆控制执行。
图 3.21 车路协同运动规划(Planning)流程



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
