




 广告
广告





















































将“不安全”场景转化为“安全”场景

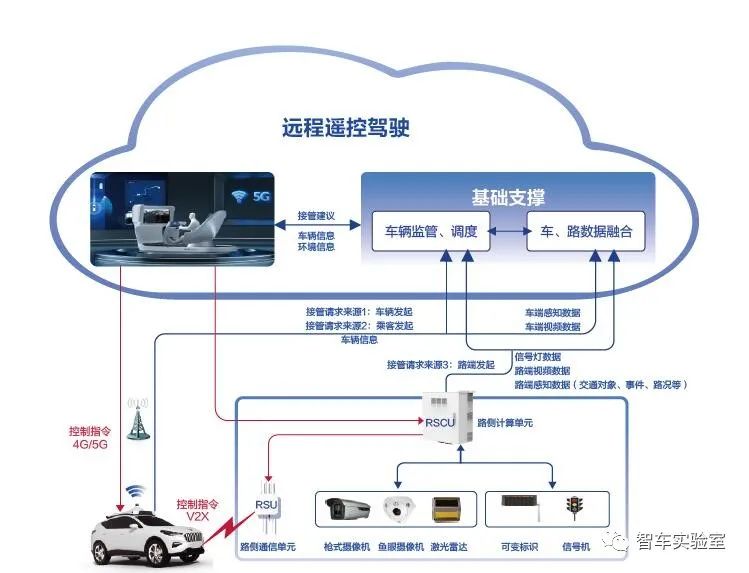
图 3.22 车路协同控制原理与总体流程(二)协同决策控制典型场景举例下面以施工场景为例,对车路协同决策规划和控制如何提高自动驾驶安全性展开进行说明。问题描述:道路施工、交通事故、交通管制等交通事件是自动驾驶车辆经常遇到、且较难应对的一类场景,尤其是在一些复杂的道路施工(如路口内施工、占据所有行进方向车道的施工)场景中,仅依靠车路协同感知或动态地图更新也不能成功克服,容易造成车辆停滞或接管,存在安全风险。场景原理:针对施工场景,VICAD具体有动态路径规划、协同决策规划、协同控制三种应对解决方式。(1)动态路径规划提前改变路径如图3.23所示,路端可以识别施工信息并发送到地图平台,发送的信息包括但不限于事件类型、时间地点、影响范围、影响时间等,通过车路协同路径规划,可以评估车辆的可通过性,若不能通过或难度较大,可重新为车辆规划路径,提前避开施工路段。具体实现流程如下:1)车辆设置目的地后,路径规划模块根据道路拓扑关系和道路拥堵情况构建全局路径规划,车辆按照路径规划行驶;2)路端检测到占道施工,同步该信息至云端,通过自动和人工的方式及时更新路网拓扑关系;若判断车辆无法通行,重新对车辆进行全局路径规划,提前绕开施工区域所在路段。
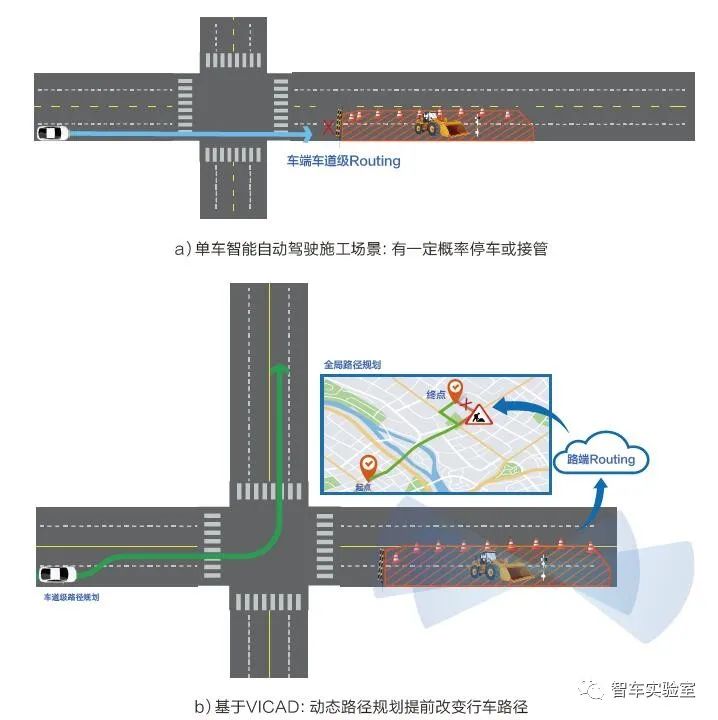
图 3.23 施工场景动态路径规划(2)协同决策规划绕行在车路协同路径规划部分,针对施工场景给出了通过提前改变车辆行进路径的解决方式;如果车辆必须保持直行,则需要在车路协同路径规划的基础上,进一步从车路协同决策规划的角度来解决施工阻塞问题,具体流程如下:1)通过车路协同感知,对道路阻塞区域、阻塞原因、阻塞可达性等进行识别,对双向车流进行实时持续性观测,获取阻塞区域周边车流轨迹,结合对道路交通态势的判断,识别本侧道路已经无法通行,但是对侧道路最内侧车道临时变更行驶方向,作为本侧方向的车道。2)路端发现车道可通行方向和连接关系变更后,更新局部区域的道路拓扑数据。3)车辆到达施工区域前,获取新的局部路网拓扑,重新对车辆进行局部路径规划,借用对向道路通过施工区域所在路段,见图3.24。
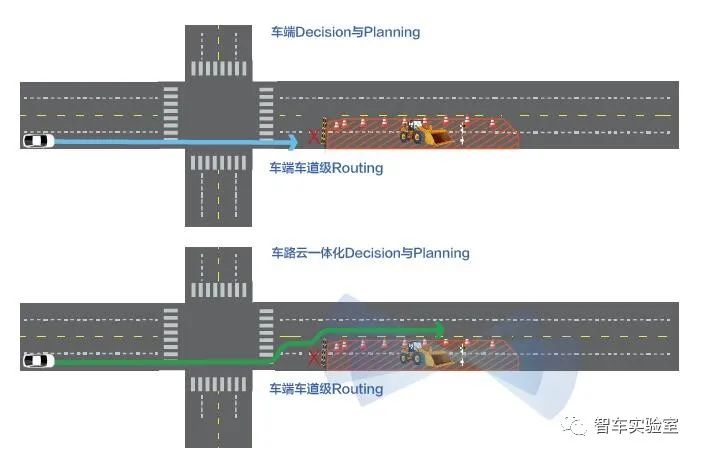
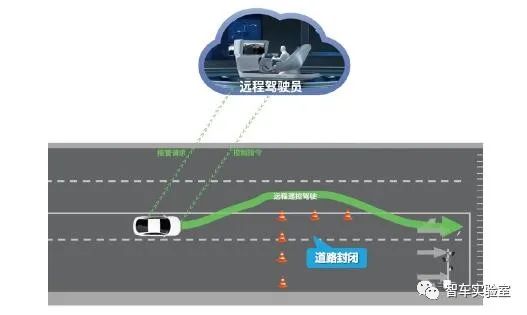
图 3.24 施工场景车路协同决策规划(3)车路协同控制绕行若通过上述两种方式仍不能解决该场景问题时,CAV可主动发起接管请求,由云端接管车辆,通过远程遥控驾驶帮助车辆通过施工阻断路段。如图3.25所示,车辆主动请求接管的流程如下:1)车端遇道路阻塞,向云端发起接管请求;2)云端远程遥控驾驶员接到车辆的脱困或代驾请求;3)车端/路端各类实时数据同步上传云端,云端远程遥控驾驶员通过信息显示屏上的信息进行人工决策;4)远程遥控驾驶员控制驾驶舱的方向盘、油门、刹车等,给车端下发控制指令;5)车辆执行远程驾驶的控制指令,进行脱困。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
