




 广告
广告





















































将“不安全”场景转化为“安全”场景


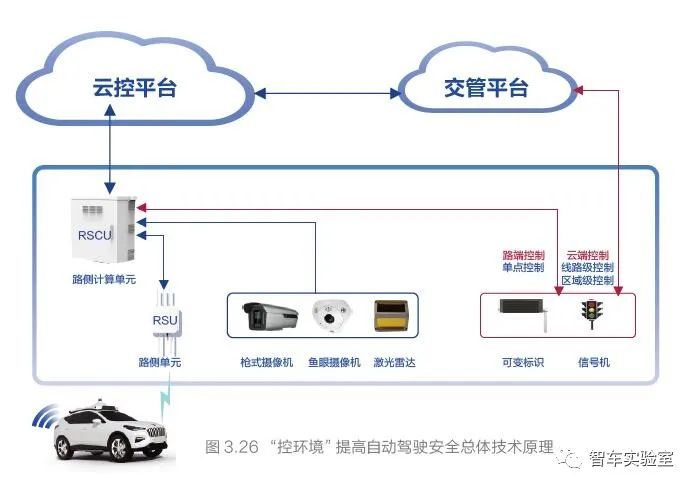
3.2.2.2“控环境”实现“不安全”到“安全”(一)总体技术原理环境安全也是影响自动驾驶安全的重要因素,通过车路协同可以实现“控环境”,实现车辆驾驶出行与交通运行管理的协调统一,最终提高自动驾驶的安全性。如图3.26所示,路端系统与设施在为自动驾驶提供VICAD服务的同时,也可以利用路端实时高精度感知定位能力,对道路和交通运行状况进行实时监测,识别不安全事件和因素,并及时采取有效手段对交通设施进行干预和控制,并通过移动蜂窝网络或者RSU通信设备提前向车辆发布交通环境信息,避免交通事故发生,达到提升交通安全的目的。
(二)典型场景举例下面从“控环境”提高自动驾驶安全的角度,列举两个比较常见的“不安全”到“安全”场景案例。(1)下穿道路积水管控问题描述:城市道路中下穿道路比较普遍,遇到下雨天气时,道路低洼地段容易积水,一旦车辆驶入可能会严重威胁车辆和人身安全,造成生命财产损失。场景原理:如图3.27所示,1)在路端有积水传感器的情况下,可由路端对下穿道路积水深度进行检测;2)根据水深判断危险程度,若有安全风险,可通过多种方式提醒或控制车辆,禁止车辆驶入危险路段。相关方式包括地图提醒、V2X预警、云端修改Routing、控制信号灯禁止通行,或者将危险信息报送交管、城管平台,由交管和城管统一对道路进行封路管理。

图 3.27 下穿道路积水场景应用效果:如图3.28所示,路端系统可以通过控制信号灯,禁止车辆靠近危险区域,提前避让积水路段,保障车辆和人员安全;或者可以在下穿道路入口处设置路闸,通过关闭路闸的方式,禁止车辆驶入,避免发生水淹事故。

图 3.28 下穿道路积水安全管控(2)隧道内危险事件管控问题描述:如图3.29所示,若高速公路隧道内发生危险情况(比如火灾、瓦斯泄露、坍塌或事故),自动驾驶车辆无法提前获取事件信息,一旦驶入隧道可能会导致二次事故。

图 3.29 隧道内交通事故场景原理:如图3.30所示,1)路端通过感知系统对隧道的危险事件进行实时感知识别;2)隧道内感知系统与隧道口的信号控制设备打通,通过控制信号灯禁止车辆进入隧道,或通过V2X将隧道事件广播给车辆,提前让车辆和驾驶员知悉隧道内事件。应用效果:通过控制信号灯,避免车辆陷入危险环境,发生二次交通事故,保证人身安全和交通安全。
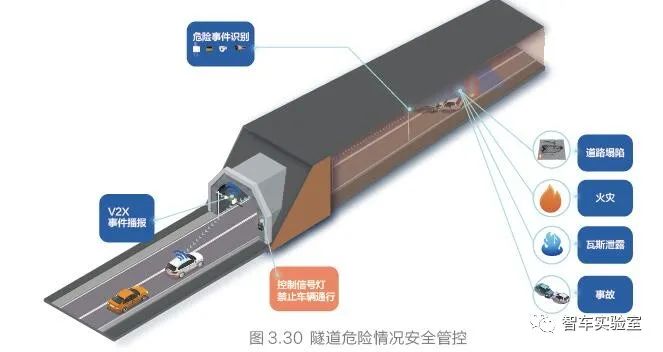
图 3.30 隧道危险情况安全管控节选自《面向自动驾驶的车路协同关键技术与展望2.0》



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
