




 广告
广告





















































百度Apollo车路协同自动驾驶进展

标准先行
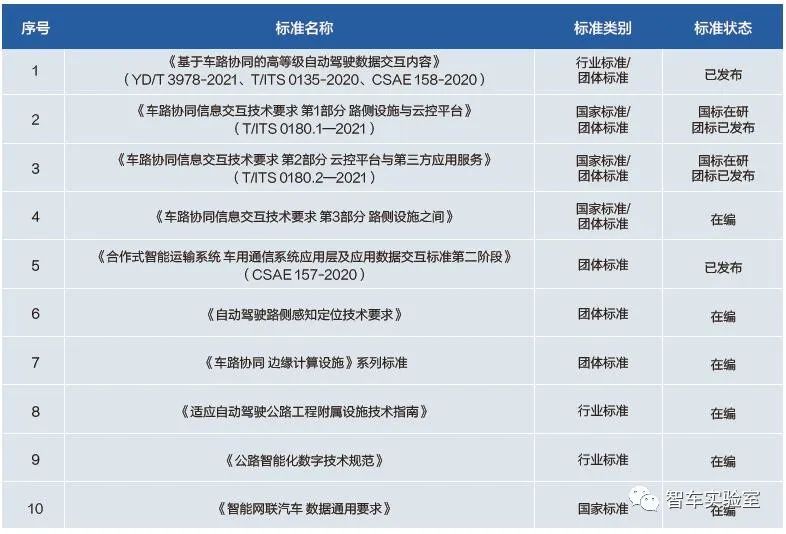
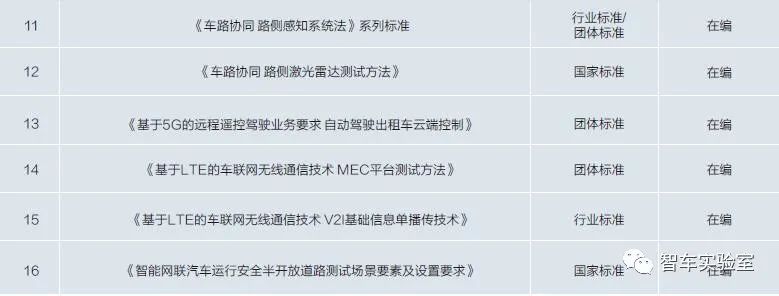
为全面支撑百度Apollo自动驾驶与ACE智能交通实现技术引领和项目落地,百度高度重视并全面 布局车路协同、自动驾驶与智能交通国内外各级标准,涉及V2X通信、汽车、交通、人工智能、数据、地图、信息安全等多个专业领域。目前百度已发布各类标准超过10项,如YD/ T3978-2021《基于车路协同的高等级自动驾驶数据交互内容》;参与及牵头的标准超过200项,核心牵头的重 要标准包括《车载激光雷达性能要求及试验方法》(国标)、《智能网联汽车 自动驾驶系统数据记录性能要求和测试方法》(国标)、《智能网联汽车 自动泊车系统性能要求及试验方法》(国标)、《车路协同信息交互技术要求》系列标准(国标)等,后续将继续依托百度在自动驾驶、智能交通、AI等领域的技术积累,支撑引领自动驾驶和道路智能化标准建设和产业发展。百度牵头和深度参与的车路协同部分标准见表6.1。表 6.1 百度牵头和深度参与的车路协同重要标准
6.1.2 Apollo Air计划2021年5月,百度联合清华大学智能产业研究院正式提出了Apollo Air计划。Apollo Air计划有三大典型特征:1)依靠纯路端感知实现车路协同自动驾驶;2)持续降维反哺车路协同应用;3)标准开源开放实现业界共享。Apollo Air最大的技术创新是在关闭车端感知情况下,仅依靠路端轻量化连续感知,就可以实现L4级别的自动驾驶闭环。截至2022年4月,Apollo Air累计闭环测试里程(含仿真)达到3万公里, 其中路口通过成功率达99%。基于Apollo Air的路端感知有以下突出优势:(1)端到端时延满足车端融合需求路端与车端进行实际需求对齐,各环节合理分配时延指标:1)路端感知融合时延140ms,主要通过边缘大算力、高性能AI模型、并行化局部高精地图实现;2)空口传输时延50ms,主要通过在LTE-V2X网络层进行包长限制、底层收发方式优化和在编码上进行帧内/帧间压缩实现;3)车端预处理10ms,通过轨迹预测模型补偿丢包;端到端时延总计约200ms。
(2)路端感知精度符合车端要求路端的感知精度已完全符合车端要求,路端具备全量交通要素(包括机动车、非机动车、行人、障碍物等)的实时准确感知能力,交通要素感知的准确率、召回率≥95%,感知定位达到0.5m(均值)、速度大小精度1.5m/s(均值)、感知对象漏检率<2%。
(3)建立质量评测闭环系统Apollo Air在实践过程中逐步完成路端数据质量评测体系的建立,可动态评估每个点位的质量是否符合L4车辆的要求。满足数据质量评测要求的点位可支撑完成Apollo Air闭环,即该点位能够支持“纯路端感知实现车路协同自动驾驶”,图6.1是目前在亦庄建设的满足Apollo Air要求的标准路口之一。

图 6.1 基于Apollo Air标准路口实现纯路侧感知的L4自动驾驶闭环6.1.3 智路OS与车路协同开放平台“开放能力、共享资源、加速创新、持续共赢”是百度一贯的技术理念。百度车路协同自动驾驶的发展也始终坚持开放开源理念,2019年12月,百度Apollo正式发布了车路协同开放平台1.0,这是国内首个针 对车路协同的开放平台。2022年4月19日,百度Apollo正式升级发布面向交通和汽车行业的车路协同开放平台2.0——“开路”,这标志着百度Apollo从“自动驾驶开放”升级到“自动驾驶和车路协同的全面开放”。“开路”是一套完整的软件和服务开放体系,包含路端软件平台、路端参考硬件和云服务平台三大部 分。“开路”将开放感知、预测、地图、标定等基础能力,为设备设施和硬件合作伙伴提供技术准则和集成规范,结合百度在车端广泛的用户触达,共享场景资源。“开路”把百度自2016年研发的车路协同全栈技术开放给业界,建立起以合作为基础的良性生态,促进车路协同技术的广泛应用;提供完整框架,支持快速开发,实现数字化、网联化、自动化的应用生态和效果,帮助开发者降低成本、提升创新效率;发挥百度在人工智能领域的技术优势,满足智能化的应用开发需求。

- 下一篇:建设高等级智能道路中国优势
- 上一篇:佛山仙湖实验室



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
