




 广告
广告





















































支持自动驾驶的高等级智能道路系统总体设计

要得到VICAD技术路线下智能道路的算力需求,就必须首先对标分析AD技术路线下车端算力的 发展现状与趋势。如图5.1所示,目前自动驾驶车端算力已跨过千TOPS门槛,蔚来ET7、智己L7、Apollo RT6面向量产的自动驾驶车端算力最高达到了1200 TOPS,行业龙头NVIDIA甚至计划在2024年,推出超过2000 TOPS的Thor芯片,应用在自动驾驶DRIVE平台。
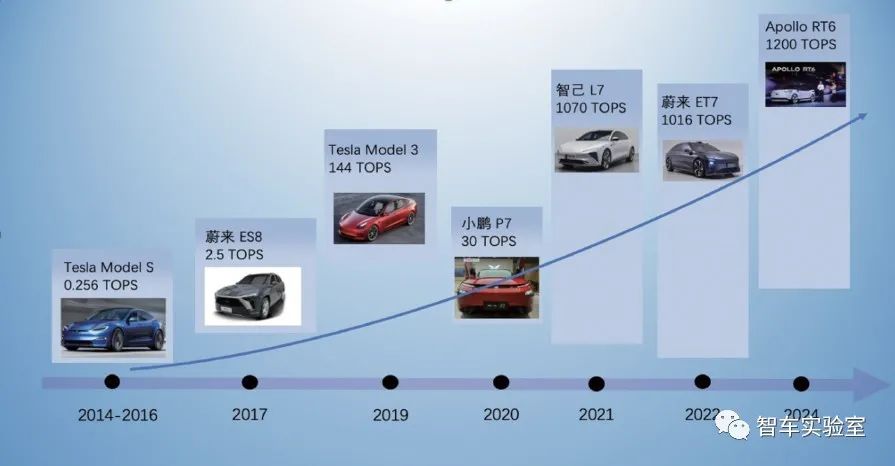
图 5.1 自动驾驶车端算力发展趋势
从服务于自动驾驶的角度来看,随着路端从协同感知向协同决策控制发展,路端算力与车端算力将呈现出相同的发展趋势,并且,路端单个节点的算力会明显超出单车算力,主要原因有:
-
ICAD中路端需要处理的具体任务与车端一致(都包括感知、地图、定位、决策规划、控制等), 且都有高可靠、高精度、低时延要求。在车端和路端所需要解决的问题具备同源同构的特性,以感知环节为例,目标检测任务需要面对4大类20小类以上的参与者和障碍物;精确性方面,典型的位 置精度需要达到带99分位约束的分米级精度;实时性方面,典型的端到端时延(物理世界发生到控制发出)需要达到带99分位约束的端到端百毫秒级;协同性方面,多传感器、多交通参与者、多基础设施间需要达到时空校准和能力协同;安全性方面,系统需显著优于人类司机,这就意味着系统安全和计算器件的冗余、保障机制等需要进行系统性设计,支撑自动驾驶达到99.9999%以上 的场景通过率。
-
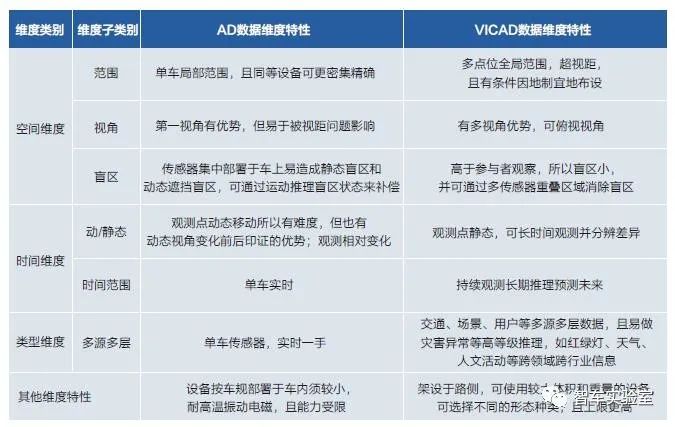
路端不仅要解决单车最优化的问题,还承载着群体最优和全局最优化的职责与使命,需要更 高算力支持。VICAD区别于单车智能,是新的智能形态,通过引入新的智能要素,带来高维数据, 并配合灵活算力和算法机制,实现由个体智能向协同智能或群体智能发展,提供更加多元化的应用服务,如智能信控、监控执法、收费等。以高维数据为例,VICAD会产生大量的数据,且信息特性与单车智能数据具有一定的正交属性,通过车路协同融合后将形成新的更高维度数据,如空间维度( 范围、视角、盲区)、时间维度(动/静态、时间范围)、类型维度(多源多层)等,分布在不同维度具有正交性的高维数据信息量更大,对于智能系统的能力会产生更有效的帮助。VICAD与AD数据 维度的比较见表5.4。
表 5.4 AD与VICAD数据维度比较
综合来看,目前的低等级道路,路端部署的设备功能较为单一、数据量小且算法模型简单;高等级智能道路为了达到表5.2和5.3所列性能指标,传感器数量、类型的增加及分辨率的提升,带来了海量数据处理需求,算法模型的复杂程度亦大幅提升,亟需算力提升,需要专门建设部署计算设备或设施执行数据汇聚、感知融合、任务调度、数据存储等关键任务。表5.5以国内多个城市的车路协同自动驾驶示范区中的路端算力为参考,列出了不同等级智能化道路路端的算力需求建议,现阶段,满足高等级自动驾驶应用的高等级智能道路路端单个节点算力需求应不低于100 TOPS。
表 5.5 不同等级智能道路路端算力需求

(3)C4等级智能道路对传感器性能要求
智能道路系统主要通过各类传感器设备完成对道路全要素信息收集,感知传感器应当满足全天时 全天候要求,以应对各类自动驾驶场景。目前主流的感知传感器设备主要包括视觉传感器、激光雷达和毫米波雷达。每类传感器的感知范围、对不同物体的识别能力以及环境适应能力均有所差异, 应发挥不同传感器性能优势,进行设备选型和方案配置,以达到最佳的感知效果。
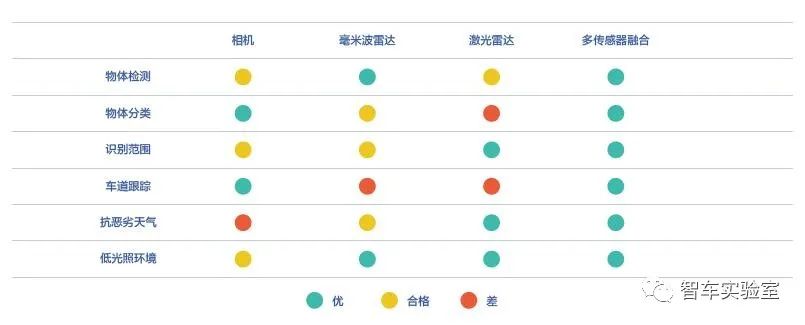
图5.2 不同传感器特性比较
(4)C4等级智能道路对地图要求
地图对于自动驾驶而言:
-
地图作为一种虚拟的感知类传感器,为自动驾驶系统提供超视距、高可信的静态交通要素结 构和语义信息,作为车端感知系统的有效补充;
-
地图作为一种高实时性、全局的空间协议,为自动驾驶路径规划提供准确的车道级动、静态通 行信息,使得自动驾驶汽车可以实现时、空最优的通行路径选择;
-
地图作为一种虚拟的、语义化的交通规则,为自动驾驶决策与控制模块提供明确的行为约束 规则和地理围栏,使得自动驾驶汽车可以更安全地与其他交通参与者进行交互。
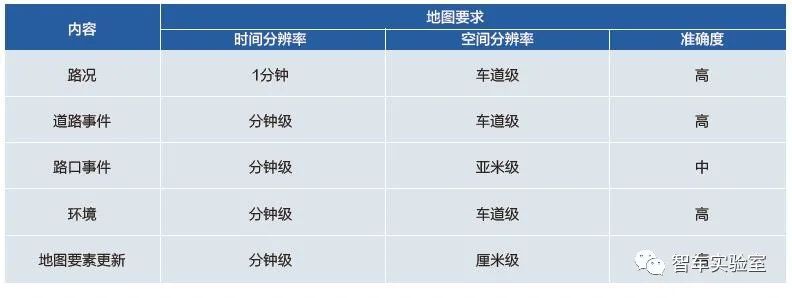
表 5.6 C4等级智能道路对地图的要求
5.1.3 高等级智能道路具体设计
5.1.3.1 系统组成与总体架构
高等级智能道路系统总体架构见图5.3,从物理分布角度看,由车端、路端和云端三部分组成。
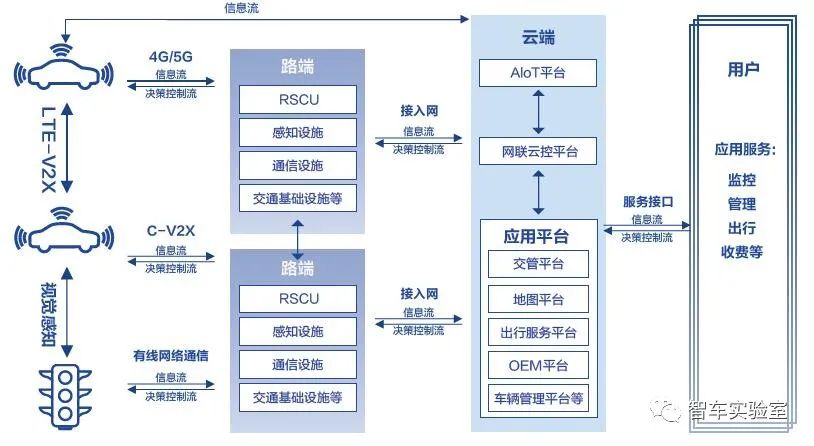
图 5.3 高等级智能道路系统总体架构



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
