




 广告
广告





















































支持自动驾驶的高等级智能道路系统总体设计

车辆是高等级智能道路系统的重要组成部分,既是被服务对象,也可能是服务的提供方,车辆应具备网联化和智能化两方面能力,其中:
-
网联化方面,应支持PC5、Uu多模态通信能力和多终端触达方式。车辆应支持多种车路通信模 式和通信协议,包括但不限于基于Uu的4G/5G,以及基于直连无线通信的LTE-V2X、NR-V2X; 在触达方式方面,可利用车机、前后装T-BoX、OBU或其他智能终端,支持开展数据共享和多样 化、个性化应用服务;
-
智能化方面,应支持车路云分层协同的智能驾驶系统架构。如图5.4所示,CAV车端智能驾 驶系统不仅可以解析处理V2X报文消息,借助HMI或其他方式为驾驶员提供预警服务,还可以进 一步与车端智能驾驶系统的感知、决策规划及控制模块进行深度融合,全方位支持自动驾驶安全、连续运行。
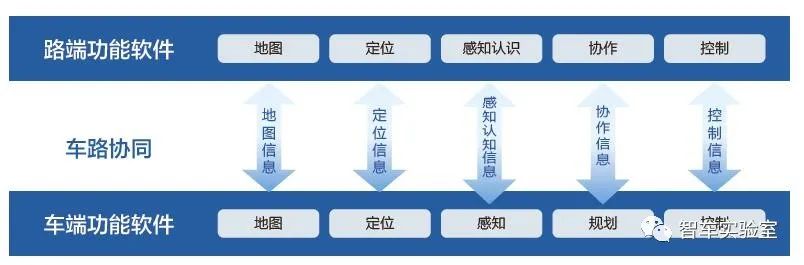
图 5.4 车端智能驾驶系统架构对路端的开放兼容性
(二)路端系统与设施
路端主要包括各类基础设施和应用服务系统,其中路端系统包括感知系统、决策规划系统、信号控制系统、监控执法系统、收费系统等;路端基础设施包括感知设施、路侧计算单元(RSCU)、通信设施、交通管理设施、交通安全设施及各类附属设施等。
RSCU是路端系统的大脑,承载核心计算能力,同时要将多个子系统有机整合在一起,提供自动驾驶服务。RSCU有两种存在形态,一种是部署在路端的独立节点设备,另一种是部署在边缘的云平台(也称可为MEC平台)。在当前技术发展水平下,为满足高等级自动驾驶应用需求,RSCU多以节点设备形态为主,部署在更靠近传感器设备的位置。
RSCU应满足高智能、高性能、高可靠和开放化等一系列应用要求,其架构呈现出OS化发展趋 势,图5.5提出了一种建议的RSCU总体架构,由实时操作系统内核层、硬件设备抽象层、中间件 层、各类域服务、车路云通信、工具链以及安全等模块组成。

图 5.5 路侧计算单元OS参考架构
-
系统内核层:实时的操作系统内核层,为上层软件栈提供了必要的内核级支持,同时进行了面 向实时处理的定制优化;
-
设备抽象层:设备抽象层实现各种设备设施接入的驱动程序。南向适配不同厂家、不同类型 的硬件设备;
-
中间件层:中间件层包含通用通信计算和AI加速计算中间件等。通信中间件需要满足高并 发性、低延迟和高吞吐量要求。AI加速计算中间件适配各类AI芯片,为AI算法程序执行提供标准调用方法;
-
域服务:为了满足车路协同自动驾驶要求应该提供包括:低时延信号灯服务,提供统一信号灯接口;全量障碍物感知服务,为车辆提供盲区车、超视距能力;智能协作服务,为车辆提供辅助决策规划能力;高精地图服务,提供高精地图引擎,对高精地图数据进行解析等;高精度传感器设备内外参标定等服务;
-
车路云通信:提供车路、路云通信能力,实现与车端、云端的无缝平滑通信,支持车端、路端以及云端的一体化计算协同;
-
工具链:工具链为上层软件编译、调试和分析提供工具支持;
-
安全:为底层硬件到操作系统、设备设施抽象层、中间件层一直到服务层和应用层提供安全服务。
(三)云端平台
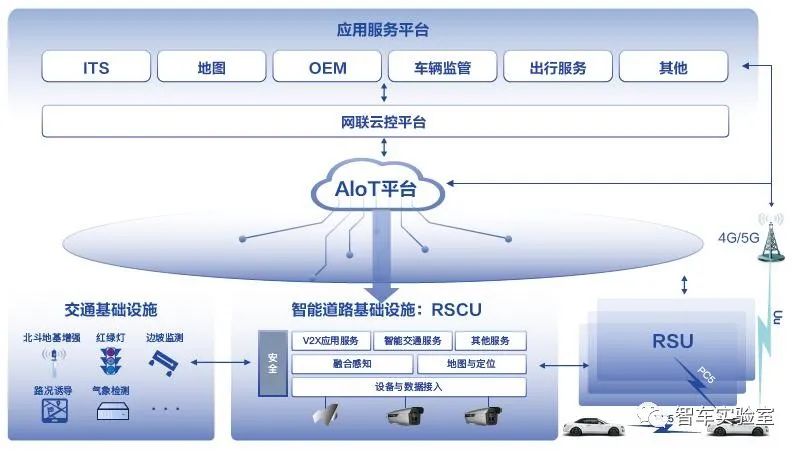
图 5.6 高等级智能道路主要组成
如图5.6所示,云端平台包括智能物联网(AIoT)平台、网联云控平台和应用服务平台三部分。
(1)智能空间物联网(AIoT)平台
AIoT平台以设备管理为基础,以云边端AI计算为支撑,以数据赋能为目标,应具备三个方面关键能力:
-
基于传统物联网(IoT)平台的连接能力。IoT平台连接智能道路系统各类设备,提供设备管理, 运维监控和OTA等基础服务;
-
AI计算能力。面向设备边缘、局域网边缘、网络边缘提供边缘计算融合能力,支持云边端算力资源灵活弹性调度,协同实现感知、规划和决策等车路协同服务,支持不同时延、不同精度、不同规模的服务场景;
-
业务数据赋能。通过海量的数据接入能力, 将车路云数据进行聚合、转换、计算、建模、分析,对外提供数据开放服务,为网联云控平台提供基础数据支撑。
(2)网联云控平台
网联云控平台是服务于车路协同业务的平台系统。具有实时信息融合与共享、智能应用编排、信息安全等服务能力,可为智能汽车、管理机构、终端用户提供辅助驾驶决策、交通运输安全、交通管理等协同应用和数据服务。
(3)应用服务平台
应用服务平台以网联云控平台为支撑,为产业提供各种差异化定制化应用服务,如乘用车网联服务、交管、地图、出行、监管等。从道路监管、车辆运营、交通治理等不同角度,提供遵循行业业务逻辑的专业化解决方案。
5.1.3.2 高可靠通信设计
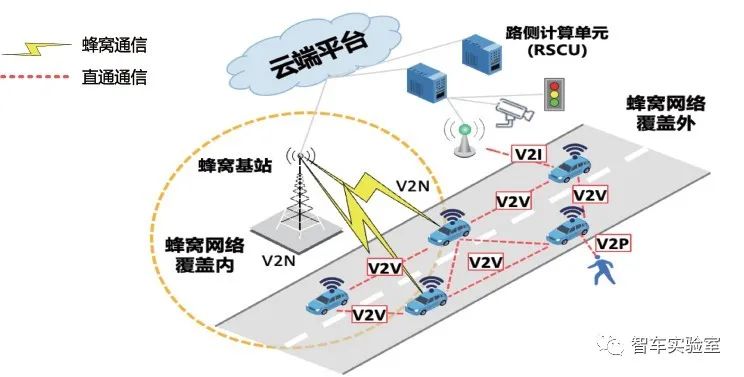
C-V2X作为车联网专用无线通信技术,能够在高速移动环境中提供低时延、高可靠、高速率、安 全的通信能力,满足车联网多种应用的需求;C-V2X通信有两种相互独立、互为补充的工作模式, 即基于PC5的直连无线通信模式和基于Uu的蜂窝移动通信模式,分别满足不同交通要素之间的 通信需求。PC5直连通信解决近程信息交互需求,Uu蜂窝移动通信解决远程的信息服务需求,两 种通信方式相互配合,互相补充,有效保证了车联网业务的连续性和可靠性。其系统架构设计采用直连通信与蜂窝通信融合的系统架构。C-V2X包括基于LTE技术的版本LTE-V2X和基于5G NR 新空口技术的NR-V2X,二者均采用图5.7所示的系统架构。
注:该图改自“车联网产业与技术发展路线图”,由中信科智联科技有限公司提供
图 5.7 直连无线通信与蜂窝移动通信融合的C-V2X通信系统架构
(一)直连无线通信
为了实现车车、车路、车人通信的低时延高可靠需求,C-V2X技术引入了直连无线通信特性,终端间可不经过基站转发直接进行数据传输,既可实现端到端通信的低时延,又可以在蜂窝覆盖外工作,满足车车、车路等设备间信息快速交互的需求。根据YD/T3400-2018的定义,基于LTE技术 的LTE-V2X车联网直连无线通信满足如下功能要求:
-
车联网终端应能够通过直连通信发送和接收消息。路侧单元应能够向车联网终端发送消息,并接收来自车联网终端的消息。车联网终端之间也能够通过PC5直连通信接口实现互通。系统应能够支持向大量车联网终端高效分发信息,并支持高密度的车联网终端通信。同时,其交互的无线信号还可辅助支持定位功能,实现空口资源的高效复用;
-
在移动速度方面,系统应能够支持最高相对速度为500km/h的车辆间发送消息,以及绝对速度 为250km/h的车辆与车辆、车辆与路侧单元、车辆与行人发送消息;
-
在通信时延方面,对于支持车车和车人通信的终端,无论是直接发送还是由路侧单元转发,最大通信时延应不超过100ms。对于特殊用例(如碰撞感知),车联网终端间发送V2V消息的最大时 延应不超过20ms。对于车到路侧单元的最大通信时延不超过100ms;
-
在消息发送频率方面,系统应能够支持路侧单元RSU和车联网终端不低于10Hz的消息发送频率;
-
在消息大小方面,不包括安全相关的消息单元,对于周期性消息,两个支持V2X应用的用户设备 之间传输的消息大小在50-300 byte;对于事件触发的消息,其消息最大为1200 byte。
对于基于5G NR新空口技术的NR-V2X相关的功能要求,在3GPP TS23.287中进行了定义,尚未完成国内行业标准的制定,本章节不做详述。
(二)蜂窝移动通信
自动驾驶等级应用的不断提高,对网络也提出更高要求,如3GPP TS22.186定义的车辆编队、半自动/自动驾驶、远程驾驶等高等级智能驾驶应用场景,需要采用 “通信+计算”一体化的方案构建新移动蜂窝网络,以满足高可靠性、大带宽等需求,进一步提升车路云一体化的服务能力,5G Uu 网络引入了V2X通信切片、边缘计算、服务质量(QoS)预测等新特性。
通过5G网络切片具有“网络功能按需定制、自动化、业务安全隔离”典型特征,利用5G公众网络 资源,利用端到端QoS或切片技术,为面向自动驾驶的车路协同数据传输提供独立切片,构建时 延和带宽有保障、与其他业务数据隔离的虚拟专有网络。自动驾驶汽车可以通过5G专属切片通道访问部署在移动蜂窝网基站侧的边缘云,同时路侧感知系统也可以通过5G Uu或者有线网络回传数据到边缘云,边缘云通过云边协同机制与云控平台等进行高效互联,实现车路云数据的融合处理, 形成不同的交通事件识别以及驾驶辅助预警信息推动到车端。此外,5G蜂窝网络将智能感知网络通信性能,实现不同场景下的信道建模,将结合不同的业务的QoS需求,提前进行网络质量的预 判,形成对于业务有效性的及时预警以及信道优化。MEC边缘计算设备批量处理多个路口的RSU 和OBU侧摄像头、雷达、信号灯等数据,通过融合感知AI算法提高了数据运算效率与数据融合 度,同时MEC具有算力弹性扩容和智能调度特点,可在线扩容,支持单路口、多路口以及区域协 同类应用,并能对全域下的目标全程跟踪、记录及分析,支持复杂场景下的自动驾驶策略制定,支持跨时空的驾驶路径引导,有效突破解决车端、路侧设备的算力瓶颈,实现车路云一体化协同计 算。MEC节点采用标准化的互操作框架,支持不同域应用服务的按需订阅与实时更新,具有“一 点分发、全网部署”的特性,快速实现自动驾驶辅助、高精地图分发与智慧交通管控等标准化应用服务的推广。
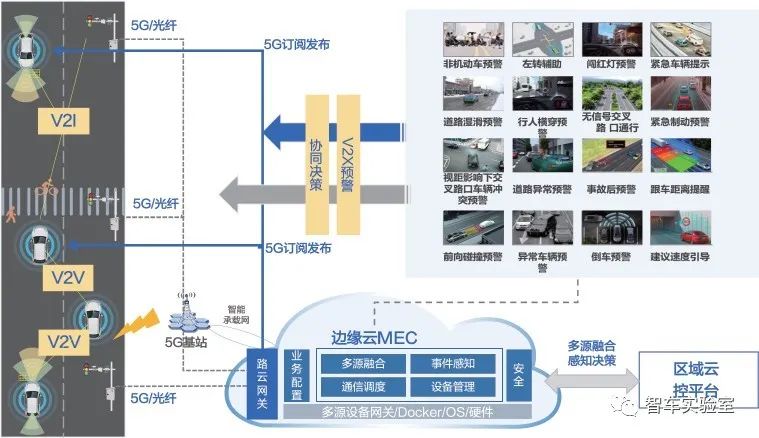
(三)Uu与PC5融合组网
如图5.8所示,对车辆接入而言,采用5G Uu与PC5 直连通信融合组网,既发挥5G大带宽、广覆盖的车辆连接能力,支持远程信息服务(如交通导航、地图下载、车辆调度等)和区域协同信息服务(如高精地图分发、智能交通管理);同时利用RSU的PC5通信实现重点场景(交叉路口、危 险路段)的覆盖,实现实时的近程信息交互,保障路侧信息及时准确触达车辆,提高行驶安全。
随着5G网络规模部署以及关键性能指标有效提升,逐步成为支持车路协同、远程驾驶、云控服务等业务的有效手段,而“云网一体、算网一体、云边协同”等信息基础设施部署也进一步加速自动驾驶开展城市级规模商用进程。在5G全场景连接的基础上,6G将进一步实现万物互联,并建立多层级、全覆盖的无缝连接,作为通信、交通、汽车等多个行业融合交叉的关键领域,不断增强无感切换、协同计算、可信安全、高精定位、通感融合、空天一体等新特性,真正实现全场景下的自动驾驶。
注:本方案由联通智网科技股份有限公司提供



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
