




 广告
广告





















































支持自动驾驶的高等级智能道路系统总体设计

5.1.3.3 系统高可用设计
VICAD对系统可靠性提出了更高的要求,智能道路系统作为基础设施,在车路协同自动驾驶中扮 演了重要的角色。智能道路系统本身是一个包含车、路和云的复杂系统,路端环境复杂、通信链路长、系统性能要求高,系统的高可用设计尤为重要。智能道路高可用设计需要考虑的因素包括但不限于:
-
道路设备设施的高可用性,尤其是应对各种天气环境的高可用性;
-
通信系统的高可用性,作为VICAD应用的重要一环,尤其要保证通信的可持续高性能服务;
-
计算与应用服务的高可用性,应达到车规级连续高质量服务级别要求,尤其是涉及到协同决策控制相关的服务;
为满足上述要求,高等级智能道路高可用设计可从以下方面重点设计:
-
算力冗余备份:系统应具备一定的冗余设计,边缘算力需要有明确的衡量压力的指标,当系统 容量达到极限影响系统性能指标时,可通过冗余的算力实现弹性调度;
-
负载均衡:应用服务应具备负载均衡能力,例如车云通信,云端应具备将流量均衡分配到不同 的应用服务实例的能力,增强服务吞吐量;
-
支持多级容灾:单机房,单机器或单实例故障应具备无需外界干预,自行恢复的能力,保证服 务可完成自切换,无单点故障;
-
分级降级:服务设计需满足最小功能原则,充分考虑不同组件之间的依赖性,降低功能服务的紧耦合性,服务可分为核心服务和非核心服务,对非核心服务的异常能实现快速摘除,保证核心功能的可用性,具备服务降级能力;
-
网络隔离:应具备网络安全控制策略,能够检测并防范网络嗅探、DDos攻击(分布式拒绝服 务攻击)等,减少机器攻击面,降低被攻击的风险;
-
灰度发布和回滚机制:面向服务的车、路、云开发环境应具备灰度发布能力,在小规模测试验 证后,若存在问题,具备回滚机制,迅速恢复到灰度发布前的稳定版本;
-
监控告警:系统构建环境复杂、链路长、硬件多,应对路侧基础设施、网络、系统资源、设备状态、软件运行状态以及车端软硬件状态进行实时监控,问题能够实时发现、快速定位,提升运营效率。
5.1.3.4 安全设计与安全管理
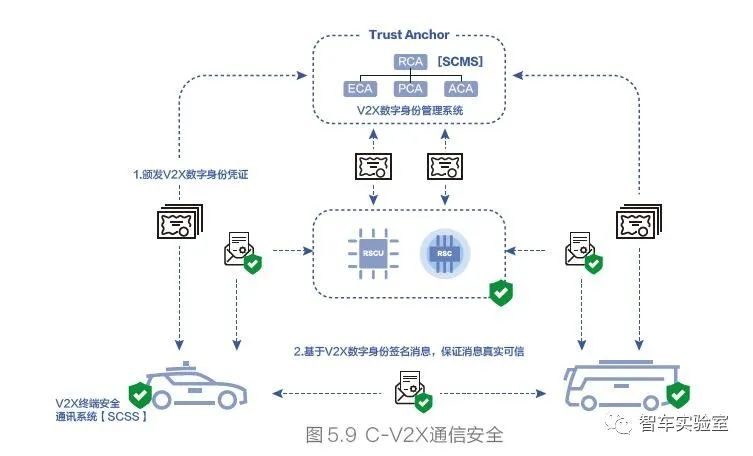
智能道路系统安全设计应包含系统基础安全、运维安全和数据安全三部分。系统基础安全是指基础设施安全,包括主机安全、通信安全等;运维安全是指通过身份认证、访问控制、安全审计等安全防护措施,保证运维人员在对系统进行远程运维过程中可靠性、有效性、可审计性;数据安全指的是数据采集、传输、存储、共享等环节的数据安全保护。
其中通信安全是车路协同自动驾驶安全的重要组成基础,包括网络通信安全和C-V2X通信安全两 个方面。如图5.9所示,应为通信终端颁发数字身份(V2X证书),基于身份构造安全消息,保证PC5消息的真实、可信,还应基于假名证书,保护车辆的位置隐私。
5.1.3.5 建设部署方案
以下以标准十字路口和标准路段为例,对C4高等级智能道路的具体建设部署方案进行介绍。
(1)C4标准十字路口方案
在十字路口,选取四个方向的4个监控杆和1个信号杆,安装感知、路侧计算单元、通讯设备及相应配件,电力及网络单独组建局域网。部署示意图及主要设备清单见图5.10。

图 5.10 标准十字路口感知覆盖范围与部署示意图
(2)C4标准路段方案
在路段,选取两个方向的2个监控杆,安装感知、路侧计算单元、通讯设备及相应配件,电力及网络单独组建局域网。部署示意图及主要设备清单见图5.11。
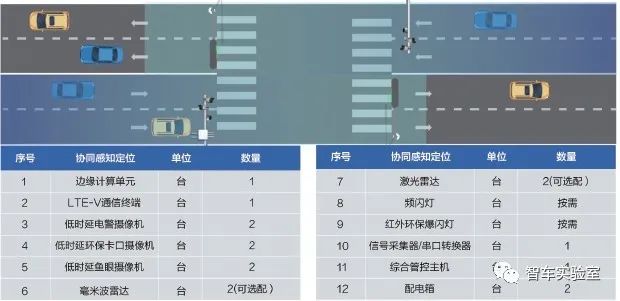
图 5.11 标准路段感知覆盖范围与部署示意图
该方案有以下突出特征和优势:
1)视觉感知为主
路口和路段的感知设备以纯视觉感知摄像机为主,仅在少量复杂或特殊道路环境下,选配少量激光雷达,在保证同等感知精度和定位能力的前提下,大大减少了道路设备设施的数量和复杂程度,建设成本大幅降低;
2)全覆盖、全量高精度感知定位
该方案可以实现主路机动车道、辅路机动车道、非机动车道、右转道等道路环境的全覆盖感知;感知能力方面,通过多视角融合感知,可实现全量交通参与者和交通事件精准识别与定位,并满足L4 高等级自动驾驶需求;
3)路端支持平滑升级
路端方案支持平滑升级,在不改变路端已有的边缘计算RSCU算力配置情况下,通过加配AI摄像 机和AI雷达等终端设备应,可满足不断变化的灵活扩展和多业务融合升级需求,最大可能降低路端 方案的升级改造代价,实现路端平滑升级;同时,路端RSCU及相关设备设施也可通过在线升级, 不断提升路端系统的能力和服务内容;
4)在线持续标定,提高感知鲁棒性
由于外力原因,相机可能会发生偏移、标定参数失效、感知精度下降等问题,传统方法是需要标定人员对该相机重新进行参数标定,不仅人力投入成本高,而且时效性差。通过在线标定算法,当检测出相机发生较大偏移后,自动进行在线标定,持续保证路侧感知相机标定参数的正确性,提高了感知系统的鲁棒性,持续为自动驾驶车辆提供高质量服务;
5)多感合一、多杆合一、多箱合一
多感合一是指多感知设备或多感知功能合一,由一套感知设备解决多业务应用问题,路端感知设备与交通感知设备(如电警卡口)进行复用,将网联和交管等多业务进行深度融合,避免重复投资建设。既满足车路协同自动驾驶需求,具备对象级、低时延、高精度、高可靠的3D全量目标感知,又满足交管需求,实现交管电警、卡口的违法抓拍功能,以及电警卡口的一体化管控,避免重复投资建设。
多杆合一是将交通监控、交通标牌、道路照明、公安监控等相关设备进行整合设计,减少杆件对道路空间的占用。多箱合一是将交通监控、道路照明、公安监控、传感器等设备的箱体进行整合,减少道路设备数量,美化城市空间,同时设备舱的整合也便于集中管理与维护。
节选自《面向自动驾驶的车路协同关键技术与展望2.0》



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
