




 广告
广告





















































L2自动驾驶主流方案及其限制

根据SAE标准定义,L2等级自动驾驶同时提供转向和速度控制,要求驾驶员全时参与驾驶,并能随时介入,紧急情况下在系统要求时须随时接管驾驶。
而L2+并不是一个标准自动驾驶等级,是目前行业各个厂家为了强调自身产品在L2级功能基础上 有不同程度的增强,从而采取的非正式称呼,其他如L2.5,L2++等名称也属于此类情况,此类汽 车的共同特性在于驾驶人仍然作为责任主体,需要全程保持专注并在系统要求时随时接管,这一点与L2保持一致。本白皮书统一用L2来代表这类产品。
4.1.1 L2常见技术方案
目前L2等级自动驾驶按照传感器布局有三种常见的技术方案,分别是1R1V(3R1V)方案、5R1V (5R5V)方案和1R8V方案,其中R代表毫米波雷达,V代表摄像头。(1)1R1V(3R1V)方案1R1V(3R1V)方案是目前比较成熟,也是装配率最高的方案。如图4.1所示,1R1V由单视觉模块FCM和单雷达模块FCR通过连接组成,没有单独集中式控制器,由FCM模块负责视觉感知部分, 同时FCR模块处理雷达感知,采用传感器后融合方案。3R1V是1R1V基础上增加两个后方雷达, 实现高速公路部分速域辅助驾驶(HWA)。
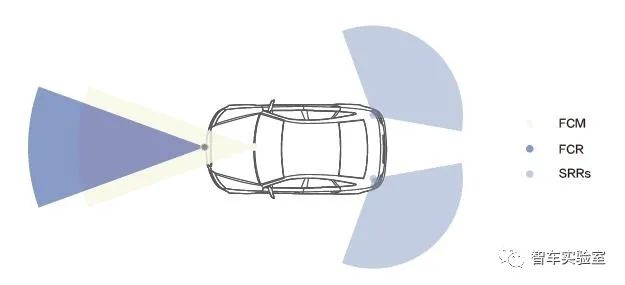
图4.1 1R1V方案(2)5R1V(5R5V)方案如图4.2所示,5R1V方案是在1R1V方案基础上加上四颗角雷达,集中域控DCU仍为低算力MCU,负责结构化传感器数据的融合并进行控车。在5R1V方案基础上,还可以升级机增加4颗环 视摄像头形成5R5V方案,在此方案中集成了集中域控制器,功能方面一般实现了高速公路全速域 辅助驾驶HWP(High Way Pilot)。
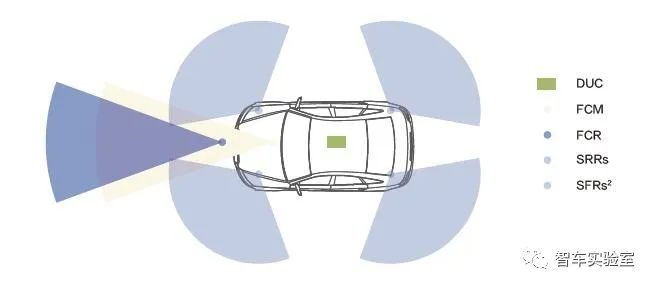
图4.2 5R1V方案(3)1R8V方案如图4.3所示,1R8V的传感器方案配备了FCR,前向3目摄像头,侧前侧后4个侧方摄像头和1个后 方摄像头,功能方面1R8V 可以支持领航辅助驾驶功能,同时开始配备高精地图。在此方案中, DCU一般都升级为大算力计算平台,大部分传感器从智能传感器变为单纯传感器数据输出,在计 算平台进行处理并融合。
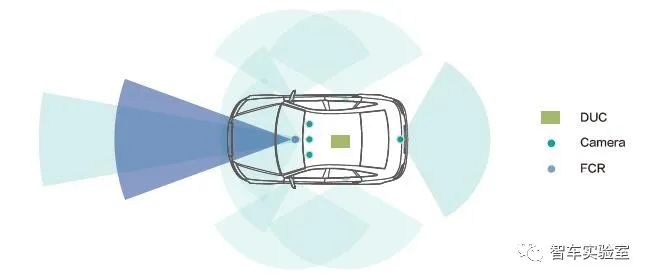
图4.3 1R8V方案4.1.2 电子电气架构演进智能驾驶的电子电气架构也在不断发展和演进。如图4.4所示,从L1到L4,在车辆传感器方案演进 的同时,计算平台也在从分布式ECU发展到L2的域集中计算平台,再到L4的整车中央计算平台, 集中化程度越来越高。图4.4 汽车电子电气架构的演进对照4.1.1节,在1R1V方案中,不存在中央控制器,一般由FCM或者FCR模块来进行传感器融合并进行控车,传感器融合一般采用后融合方案,算力要求低,规划和控制部分逻辑简单,能够适应高速结构化道路简单工况。随着传感器数量增多,感知复杂深度学习模型引入,从5R1V开始,传感器融合、感知、预测、规划, 控制的复杂度提高,L2车辆开始装配集中式计算平台、高精地图、高精度定位、车载通信单元等设备,具备领航辅助驾驶能力。随着L2的进一步发展,车载计算平台在融合了定位、地图、单车感知的基础上,进一步融合通信能力,具备车车、车路、车云通信能力,为基于车路云协同环境下的协同定位、协同感知、协同规划控制提供了软硬件架构上的有力保障。
4.1.3 L2自动驾驶面临的主要挑战
与第三章L4面临的问题类似,L2级自动驾驶面临的问题在安全和ODD两个方面的问题更加突 出。在安全性方面,由于L2处于人机共驾的阶段,人类驾驶员仍然是责任主体,所以对于路端感知和路端安全事件提醒,不仅仅是需要用于车端决策规划,更重要是要和人类驾驶员交互,使得接管有更充足的提前量,减少接管突然性,使得L2自动驾驶更安全、更人性。4.1.3.1 安全挑战如图4.5所示,在L2等级ADAS安全事件中,超过10%为危害人身安全的交通事故,这一比例大幅 超过手动驾驶,TOP4事故原因包括:1.对于前方故障、抛锚或施工未能及时感知;
2.前车突然减速、急停或加塞应对不及时;
3.异常ADAS工作环境条件,如雨雪天路面和团雾,可能会导致车辆刹车距离过长或者传感器时效;
4.高速道路路面抛洒,遗落物等静态物体不能有效识别。
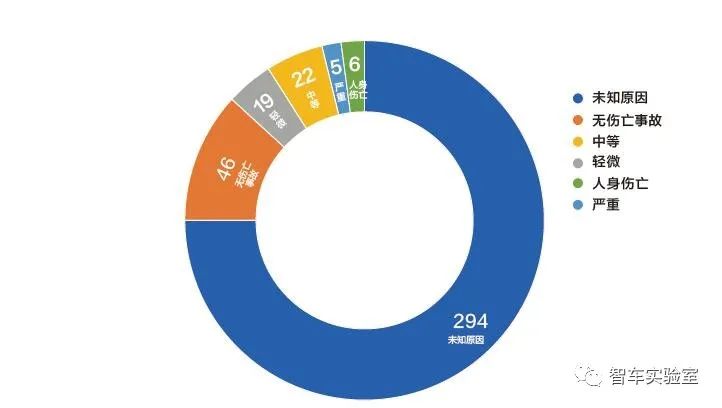
图4.5 L2 ADAS 危害等级分析(数据来源:NHTSA ADS SGO Report, 2022年6月)
-
感知距离和人类反应时间的冲突
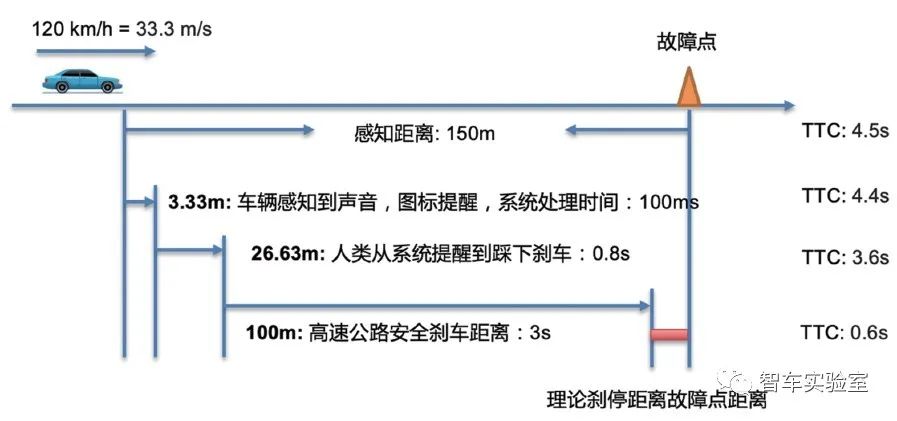
图4.6 高速施工场景TTC分析感知距离和人类驾驶员反应时间的矛盾,是目前高速公路场景下各类L2 ADAS安全的首要因素, 提前预知前方事故,施工等安全事件是提高L2 ADAS安全性的首要前提。如图4.6所示,按照典型场景高速公路路障识别为例,车辆以120km/h速度行驶时,在150m左右距离可以识别到路障锥 桶,从车辆感知识别,到通过图标或声音为驾驶员提供预警,以及驾驶员反应刹车,最终TTC(Time to Collision,预计碰撞时间)已经不足1s,留给人类的安全反应时间严重不足。再比如图4.7所示的两个场景,在道路转弯曲率过大,或者在前方隧道的场景下,L2 ADAS无法预知前方安全事件,驾驶员没有任何反应时间。

(2)静态物体识别能力不足
静态物体识别是目前高速公路L2 ADAS的安全难点之一,已经发生多起因未能识别路障或抛锚车辆而引发安全事故的案例。目前L2广泛采用的毫米波雷达,因为识别方向精度低,为了避免幽灵刹车,在高速上对于路面静态物体的识别会进行过滤,而摄像头目前受到反光,光线不足、识别距离等因素也影响了高速静态物体识别。本章后续提出使用路端检测,并且通过路端V2I和云端V2N 形式进行广播的方式,提供解决方案。(3)路面和环境条件感知能力缺乏
L2车辆的动力模型需要考虑各种环境因素。以刹车距离为例,车辆在不同环境条件下的刹车距离 差异较大,如行驶在湿滑路面或冰雪路面上的车辆会有不同的制动性表现,当传感器失灵、无法感知当前道路条件,并且按照固定参数控车时,可能会导致紧急情况下的控制失效,引发安全事故。如图4.8所示,随着车速增加,车辆在干湿两种路面的刹车距离差异逐步扩大(忽略车辆环境、按照固定参数控车无法保证安全的跟车距离)。
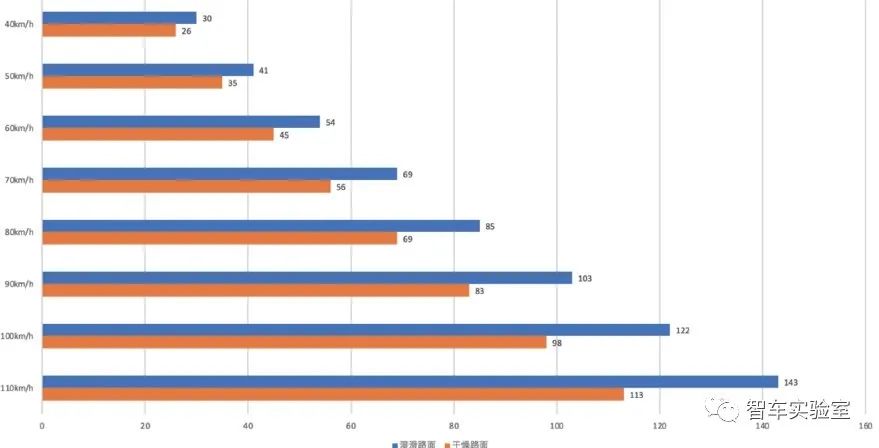
图4.8 干湿路面刹车距离对比受车辆传感器限制,L2车辆较难获取更多环境条件信息。通过路端感知和云端下发信息,车辆可以提前获知前方道路条件等环境信息,保证L2辅助驾驶安全。4.1.3.2 ODD受限在自动驾驶ODD方面,L2自动驾驶车辆面临的问题更加突出,目前仅能在高速公路的部分简单场景允许自动驾驶系统运行,城市道路、停车场等均要求驾驶员接管,下面对于城市和停车场场景限制及其原因进行分析。(一)L2辅助驾驶城市场景限制L2辅助驾驶目前在城市道路还不成熟,还面临诸多技术方面和安全方面的挑战,下面列举两个典 型的城市挑战场景:
-
红绿灯识别问题

红绿灯逆光 多语义红绿灯 红绿灯遮挡图4.9 红绿灯识别问题L2扩展到城市道路驾驶的首要挑战就是红绿灯识别问题,逆光、多语义、遮挡等问题,导致目前靠前向摄像头视觉识别红绿灯的方案很难系统地彻底解决所有长尾问题,给L2扩展到城市道路带来挑战。(2)高精地图覆盖和更新问题目前L2辅助驾驶方案大多建立在高精度地图之上,高精度地图为自动驾驶车辆提供了车身传感器 之外的重要先验信息,大幅加速了感知,规划,决策及定位等自动驾驶应用算法,但是在L2扩展到城市道路场景后,高精地图仍面临以下挑战:
-
高精地图主要覆盖高速公路和城市快速路,城区道路覆盖不足,并且建设成本高;
-
高精地图鲜度问题,即如何保证足够的更新频率以及时体现现实世界变化;
-
高精地图动态图层更新,比如封路、可变车道、限行政策等动态元素的更新。
高精地图的缺失或者鲜度不足问题也是目前导致L2辅助驾驶尤其是领航辅助驾驶模式导致接管 的主要原因之一,行业也亟待一种更优的地图变更识别,采集和分发的方案。(二)公共停车场泊车功能限制在各种驾驶场景中,停车场泊车耗费大量的时间和驾驶员精力,相比其他公开道路的驾驶活动,在停车场内泊车几乎没有乐趣可言。停车场(尤其是购物中心停车场)实现自动驾驶将极大提高社会资源利用率和商业效率,改善驾驶体验。当前已经量产的自主泊车技术方案主要为学习型技术路线,适用于在家庭、办公区等固定场景,通过车辆对驾驶行为以及周边环境的学习而来,难以应用在大型公共停车场。下面列举一些限制公共停车场自主泊车功能实现的限制:(1)遮挡环境定位能力缺失目前室内停车场定位,尤其是复杂多层停车场定位仍然缺少行业标准解决方案,停车场自动泊车功能受限需要解决室内定位能力问题,目前自动驾驶依靠的GNSS、RTK、IMU等定位方式在室 内有遮挡时因为缺少可靠,标准的绝对定位信号源来消除IMU的时间累计误差,所以在室内定位 技术方案的建立和标准化是目前停车场自动泊车的前提。(2)缺乏行业标准化方案要实现停车场自动泊车,首先车辆必须能够从停车场场端获取车位状态,并且能够接受场端指派车位,而停车场本身也需要支持车位状态管理、车位预留、车位指派、车辆自动计费等功能。目前的停车场还停留在车位占用指示灯,可用车位数量指示灯等为人类驾驶泊车引导的阶段,缺乏为自动驾驶服务的标准化的车位查询、车位分派、车位预留、车位引导、自动离场收费等功能。在车路协同架构中,停车场场端必须作为整个车路协同系统的一部分,做到和车、路、场、云之间互操作的标准化,才能真正实现停车无忧,大幅提高社会和商业效率。
节选自《面向自动驾驶的车路协同关键技术与展望2.0》
- 下一篇:管理扩展自动驾驶ODD,实现无接管连续运行
- 上一篇:面向L2的车路协同自动驾驶服务



编辑推荐




最新资讯
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
-
天检新能力VOL.95 | 乘员晕车仿生测试能力
2025-04-25 10:14
