




 广告
广告





















































管理扩展自动驾驶ODD,实现无接管连续运行

自动驾驶ODD是指自动驾驶系统设计时确定的适用于其功能运行的外部环境条件。只有当全部条 件都满足时,自动驾驶才能保证正常运行;相反,欠缺任何一个前提条件,自动驾驶系统都有可能出现故障,这时就需要采取紧急停车措施或是驾驶员手动接管。如图3.36所示,不同等级自动驾驶车辆的ODD限制存在差异,L4等级自动驾驶ODD限制相对较小、L3等级自动驾驶次之、L2等级 自动驾驶限定更为严格,只能在有限的环境或场景下启用自动驾驶模式。以某品牌L3等级自动驾驶ODD为例,只有在满足下述条件时,才允许开启自动驾驶模式:
-
行驶在高速公路或者带有中央隔离带和护栏的两车道以上机动车专用公路上;
-
所在车道和周边车道的车间距离较近,即在堵车状态下;
-
车的行驶速度不超过60km/h;
-
在传感器可检测到的范围内没有信号灯也没有行人。
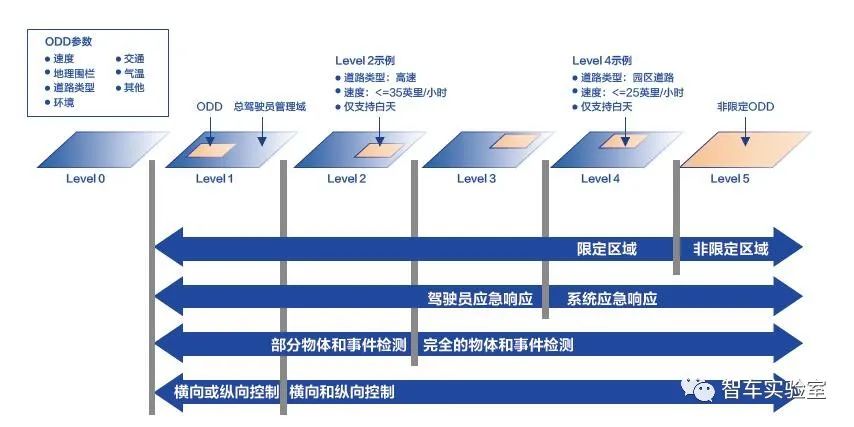
图 3.36 不同等级自动驾驶ODD限制如图3.37所示,自动驾驶ODD总体上可以分为静态实体、环境条件和动态实体三类29,其中: 1)静态实体由运行环境中状态不改变的实体组成,如:道路、建筑等;2)环境条件包括天气、大气条件和信息环境;3)动态实体由运行状态发生变化的实体组成,如交通情况、道路使用者和非道路使用者。
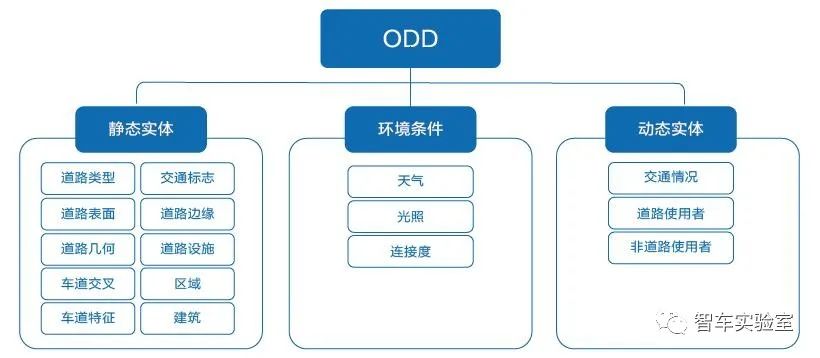
图 3.37 自动驾驶ODD分类3.3.2 基于车路协同的ODD动态管理与扩展(一)总体技术原理通过车路协同,可以支持对自动驾驶ODD进行动态管理,并合理扩展自动驾驶ODD,让自动驾驶车辆在尽可能多的环境下实现连续自动驾驶。通过VICAD管理扩展自动驾驶ODD的流程见图3.38,包括以下步骤:
-
明确自动驾驶ODD限制场景清单,需要确定不同等级、不同品牌、不同车型自动驾驶车辆的 具体ODD限定场景清单;
-
实时检测识别ODD限制场景:通过车路协同感知,对CAV及周边交通环境进行实时感知识别 ,包括交通参与者、交通事件、交通运行状况等,并对感知结果信息进行综合判断,确定对自动驾驶是否有影响,并确定影响时间、影响范围和影响程度等,以及是否作进一步处理;
-
路端发起对自动驾驶车辆提供VICAD应用服务:针对确有影响的ODD场景,路端发起对 CAV的应用服务请求,车辆平台经审核确认后,由路端为车辆提供协同感知、协同决策规划或协 同控制服务;
-
车辆在路端的帮助下,安全无接管通过ODD限制场景。

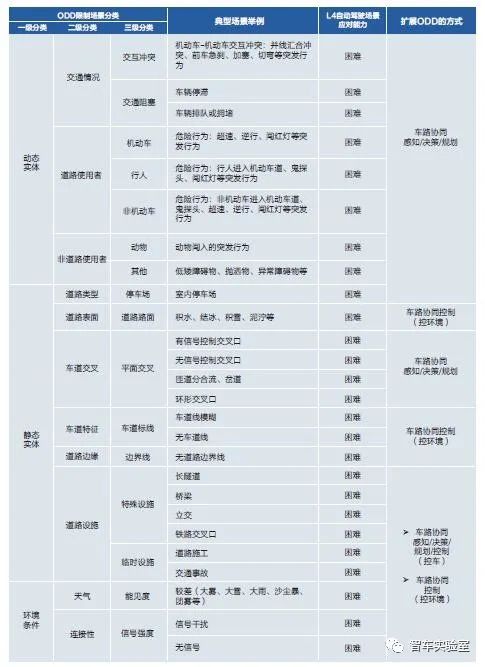
图 3.38 ODD动态管理流程图(二)典型场景举例:无信号灯交叉口协调通行表3.12列举了L4自动驾驶的可能存在的典型ODD限制场景,如道路施工、交通事故、混行等相关场景。针对其中的动态实体类ODD限制场景,可通过车路协同感知或决策规划方式,提升CAV的 感知能力和决策规划能力,解除ODD限制;针对静态实体和环境条件类ODD限制,在车路协同感 知和决策规划的基础上,还可以通过车路协同控制实现对车辆、交通设施和交通环境的优化控制,例如信号灯优化控制、道路融雪除冰、装置等,保障车辆安全通过ODD限制场景。 表 3.12 自动驾驶ODD限制与管理扩展实现方式(举例)
下面以无信号灯交叉口协调通行为例,对ODD管理和扩展进行说明。问题描述:以图3.39为例,自动驾驶车辆在通过复杂路口(包括城市内复杂交叉口、高速公路或快速路匝道口)或无信号灯交叉口时,由于不同方向车辆流向的交叉冲突,容易造成碰撞风险或引发接管。
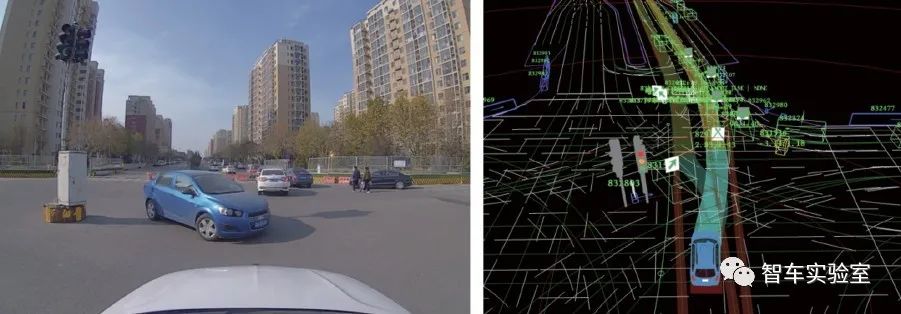
图 3.39 无信号灯交叉口场景场景原理:通过车路协同可以从路口全局识别预测所有车辆的驾驶意图,并给车辆制定合适的通行策略,让路口车辆有序通行,可避免接管。具体流程如下:1)路端系统和设施对路口车辆进行实时感知预测,路口车辆也可通过V2X主动上报车辆行驶意图(预期轨迹,包含各时刻的车辆位置及速度);2)路端系统和设施依据交通规则(左转让直行)、优先策略等进行一体化决策,比如让直行车辆优先通过、左转车辆随后通过;3)左转车辆根据路端的统一调度提前减速避让,直行车辆可不减速或加速通过;4)所有车辆在路端的统一调度下,高效通过路口。应用效果:如图3.40所示,通过协同感知和决策规划,可以保证自动驾驶车辆在不接管的情况下,具备在交叉型道路环境行驶的能力,从而扩展了自动驾驶的ODD。
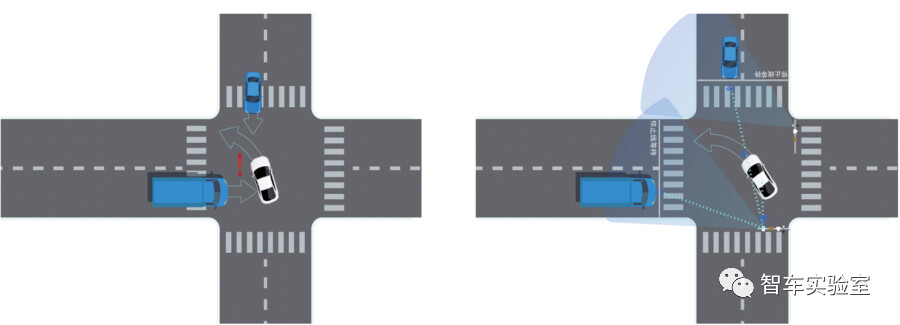
自动驾驶车辆在无信号灯交叉口无法安全高效通行,需要驾驶员接管
通过车路协同控制,实现自动驾驶车辆无信号灯交叉口协作通行图 3.40 车路协同决策规划实现无信号灯交叉口协调通行(三)综合应用效果车路协同对自动驾驶ODD扩展的前后对比效果示意见图3.41和图3.42。以一次具体出行行程为 例,从起点到终点过程中,会经历一系列场景,如:
-
泊车场景,如室内封闭的停车区域驶入驶出;
-
城市道路中的交通冲突场景,如有信号灯交叉路口、行人非机动车混行道路;
-
高速道路中的长隧道、沙尘团雾等低能见度区域、施工区域等场景等。
受自动驾驶ODD限制,在经过困难场景时,车辆必须退出自动驾驶模式,并由驾驶员对车辆进行接管,使得自动驾驶不能连续运行;通过VICAD,可以帮助车辆在这些ODD限制场景中依然保持自 动驾驶状态,实现自动驾驶连续无接管运行(除极端恶劣天气、无高精度地图覆盖等不可控因素外),如图3.42所示。
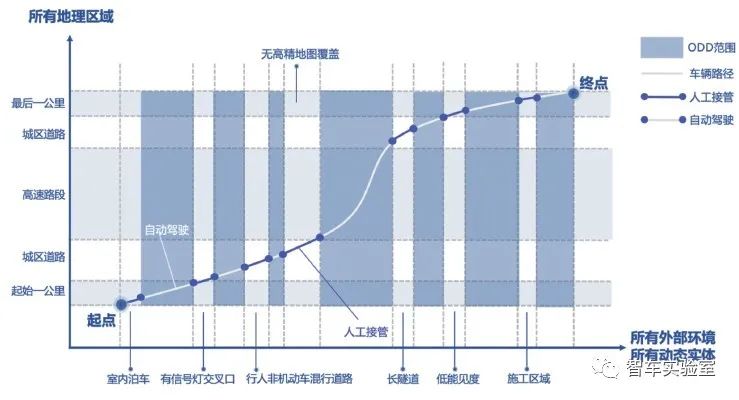
图 3.41 ODD扩展前
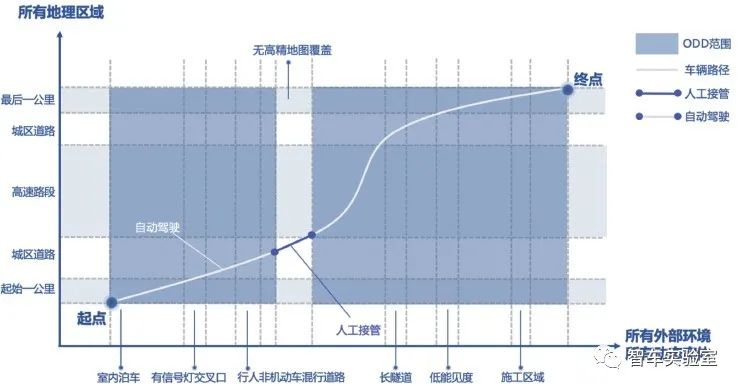
图 3.42 ODD扩展后小结如上论述,在VICAD多重作用下,可以为L4自动驾驶车辆提供差异化应用支撑服务,让L4自动驾驶车辆更安全、更普适,服务于居民的日常出行。图3.43示意性给出了VICAD对L4自动驾驶车辆的作用效果,其中:1)在自动驾驶能力水平方面,L4自动驾驶能力水平会显著提高,能够成功应对各类复杂场景;2)在自动驾驶商业化落地方面,现阶段L4的自动驾驶只能在封闭或有限区域内实现自动驾驶规模商业化落地,L4单车智能在足够长的时间和足够充分的研发投入条件下,最终可以实现无人化自动驾驶规模商业化落地,但是在VICAD加持作用下,可以快速达到无人化自动驾驶规模商业化落地要求的临界点。
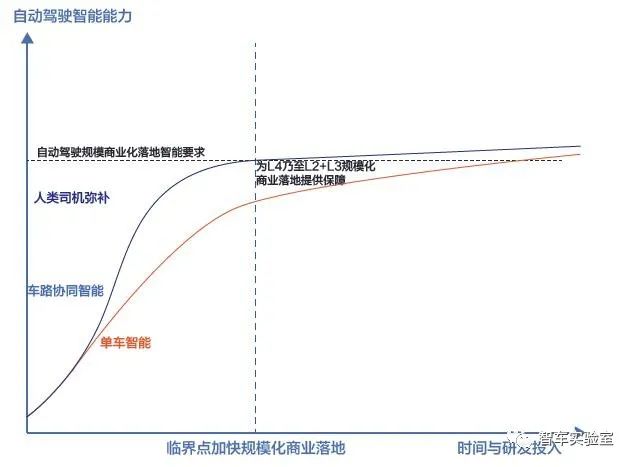
图3.43 VICAD对L4自动驾驶的促进作用
节选自《面向自动驾驶的车路协同关键技术与展望2.0》
- 下一篇:VICAD安全评价模型与仿真验证
- 上一篇:L2自动驾驶主流方案及其限制



编辑推荐




最新资讯
-
ESI 全新BM-Stamp软件在汽车行业冲压仿真精
2025-04-02 09:27
-
车辆软件测试工程师的工作内容---解读GBT德
2025-04-02 08:41
-
浅谈机动车检测行业合规经营与检验人员职业
2025-04-02 08:40
-
NOA该允许驾驶员脱手么?
2025-04-02 08:37
-
联合国最新汽车法规清单(到R176)
2025-04-02 08:31
