




 广告
广告





















































VICAD安全评价模型与仿真验证

为了量化评价VICAD在典型交通场景下对安全的收益,本白皮书在车路协同自动驾驶安全收益模型(Vehicle-Infrastructure Cooperated Autonomous Driving Safety Revenue Model,VICAD-SRM)28的基础上进一步加入复杂的交通场景交互与高保真的传感器数据渲染,建立了自动驾驶一体化评价模型(Unified Model of Autonomous Driving evaluation,UMADE)。如图3.31所示,UMADE支持选取不同的测试场景、不同的交通交互方式以及不同的评价指标,针对不同的自动驾驶解决方案进行系统表现的量化对比测试。
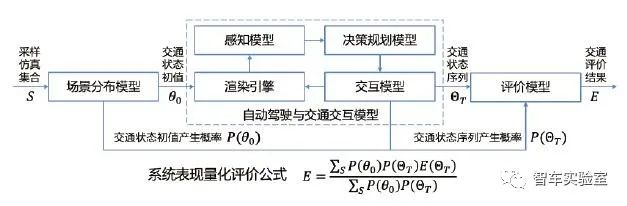
图 3.31 自动驾驶一体化评价模型(UMADE)以下为自动驾驶一体化评价模型中各功能模块的简要介绍。1)场景分布模型:用于描述选定场景中交通状态初值的分布概率。常见的分布概率模型包括:跟驰车速服从对数正态分布、跟驰车头时距服从负指数分布等;2)渲染引擎:用于根据交通状态为自动驾驶车辆与路端设备提供高保真的传感器数据,同时也将用于对交通场景的行为事件进行可视化还原。自动驾驶一体化评价模型对基于UE4渲染引擎的开源自动驾驶模拟器CARLA进行了二次开发,提供了包括激光雷达与视觉相机在内的常见车载传感器以及路端感知设备的数据接口;3)交互模型:用于描述交通参与对象之间的交互行为。自动驾驶一体化评价模型支持交通信号、车辆、行人、非机动车等交通参与对象,在CARLA自带的交互模型的基础上进一步提供了交通参与对象交互的自定义接口;4)感知模型:用于模拟车路协同系统通过云端信息以及车端与路端的传感器数据进行环境感知的过程。自动驾驶一体化评价模型支持在车路两端自由接入目标检测、语义分割、异常检测等自动驾驶相关的感知算法;5)决策控制模型:用于模拟车路协同系统通过云端信息以及车端与路端的传感器数据进行决策、规划与控制的过程。自动驾驶一体化评价模型支持在车路两端部署协同决策控制算法,进而有序调度交通场景内的相关交通信号与车辆;6)评价模型:用于评价自动驾驶在交通环境下的系统表现。自动驾驶一体化评价模型支持选取不同的评价方法,可以对指定自动驾驶方案在指定交通场景下的安全性和通行效率等指标进行量化评价。为了有效阐释自动驾驶落地过程中遇到的实际困难,经过对自动驾驶领域公开数据与百度实际测试数据的分析与归纳,针对最为关注的自动驾驶安全与极端场景应对问题,选取行人鬼探头、无保护左转、异常障碍物与异常交通状况四个典型场景(详细描述见表3.10),利用自动驾驶一体化评价模型开展量化评价。表 3.10 场景列表

针对上述典型交通场景,可选取单车智能、车路协同感知与车路协同决策控制三种不同的自动驾驶模式进行系统表现对比,借助自动驾驶一体化评价模型得到以下仿真结果与分析。(1)行人鬼探头如图3.32所示,单车智能无法对遮挡产生的视野盲区进行有效感知,因此存在较大的交通安全隐患。相比之下,车路协同感知提供了互补信息,为前车避让行人提供了感知的信息增量。而车路协同决策控制则提供了全局车辆协同决策的能力,为后车提供了前车驾驶行为的信息增量,从而降低了碰撞事件的发生概率。

图 3.32 基于行人鬼探头场景的系统表现对比(2)无保护左转如图3.33所示,由于对向左转的大型车辆遮挡了主车的感知视野,使主车仅依赖单车智能无法有效感知到对向的直行车辆,因此存在较大的交通安全隐患。与行人鬼探头场景类似,车路协同感知提供了互补信息,为前车避让对向直行车辆提供了感知的信息增量。而协同决策控制则提供了全局车辆协同决策的能力,为后车提供了前车驾驶行为的信息增量,从而降低了碰撞事件的发生概率。
图 3.33 基于无保护左转场景的系统表现对比(3)异常障碍物异常障碍物一般不会出现在自动驾驶感知系统的训练样本内,需要由额外的感知异常检测算法进行感知不确定分析,将预期功能安全SOTIF中的“未知”场景转化为“已知”的异常场景。如图3.34所示,单车智能无法预先对异常障碍物进行有效的检测,存在较大的交通安全隐患。而车路协同感知提供了冗余与强化信息,为前车避让异常障碍物提供了信息增量。而协同决策控制则提供了全局车辆协同决策的能力,为后车提供了前车驾驶行为的信息增量,降低了碰撞事件的发生概率。

图 3.34 基于异常障碍物场景的系统表现对比(4)异常交通状况在图3.35所示场景下,车辆需要面对较为复杂的交通状况。首先,存在一辆静止车辆停在修路路段前,自动驾驶车辆需要判断其驾驶意图并确定排队策略。其次,在双向单车道条件下存在临时的修路路段,自动驾驶车辆需要决策是否违反交通规则进行“逆行”。最后,由于在单车道的条件下存在对向来车,自动驾驶车辆需要与对向来车进行博弈与交互。由于缺少全局信息,单车智能难以在这一复杂状况下采取有效决策。而车路协同感知提供了冗余与强化的增量信息,可以通过路端长时间观测,有效预测静止车辆的意图并模仿其他非自动驾驶车辆的驾驶行为,具有在前述复杂状况下采取有效决策的可行性。协同决策控制则可以获取云端交通状况异常的先验信息,结合全局车辆协同决策的能力,为对向车辆提供了自动驾驶车辆的驾驶意图等信息增量,进而提高了单车道对向通行的通过效率。

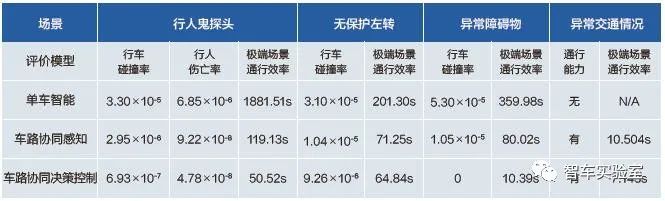
图 3.35 基于异常交通状况场景的系统表现对比总体而言,车路协同感知与车路协同决策控制对自动驾驶的安全性有较大提升。上述典型场景为低概率出现的极端场景,具有较高危险性。行人作为交通安全问题中的弱势群体,确保行人安全对自动驾驶技术的发展与应用尤为重要。在极端的行人鬼探头场景下,与AD相比,VICAD模式在人体伤害评价指标方面可以得到大幅的安全提升;同时,实验结果表明,VICAD在应对无保护左转、异常障碍物与异常交通情况时均取得了明显的系统表现提升,证明了VICAD能够有效帮助解决自动驾驶落地面临的极端场景应对问题。详细的实验数据如表3.11所示,具体的实验方法请参见附录B。表 3.11 基于自动驾驶一体化评价模型的实验结果
节选自《面向自动驾驶的车路协同关键技术与展望2.0》
- 下一篇:自动驾驶 缩略语
- 上一篇:管理扩展自动驾驶ODD,实现无接管连续运行



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
