




 广告
广告





















































百度Apollo车路协同自动驾驶典型实践场景和技术优势

如图6.22、6.23所示,两张图片是同一时刻的车端和路端检测与车融合后的结果。在图6.22中,车辆(蓝白色)很难对较远处的障碍物进行稳定检测(行驶路径上没有障碍物显示),容易造成急刹和事故风险。在图6.23中,通过VICAD超视距协同感知,车辆可以提前获取前方车辆、非机动车或行人的运动情况(路径附近的粉色框),避免了车辆急刹或事故风险。

图 6.22 超视距协同感知

图 6.23 超视距协同感知
(五)低速车辆协同感知
AD低速车辆感知问题描述:
受车端传感器感知视角及车辆实时运动等因素的影响,车辆对路边低速车辆检测的速度估计不准,如路边缓慢倒车、路边车辆驶出等,造成潜在碰撞或急刹风险。
VICAD低速车辆协同感知:
如图6.24所示,通过路端多传感器部署,实现对道路多方位、长距离连续检测识别,并与车辆感知进行融合,实现自动驾驶车辆对低速车辆或行人的准确感知识别,车辆可提前做出判断和决策控制,进而降低事故风险。
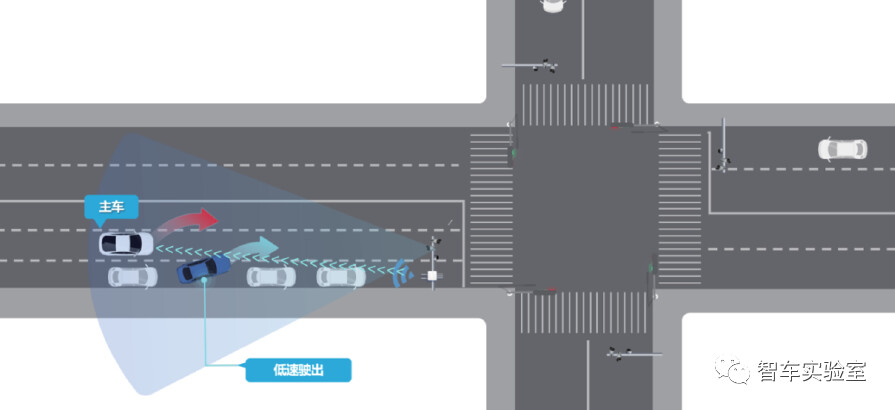
图 6.24 路边低速车辆协同感知
具体案例:
车辆直行时,有VICAD协同感知的情况下,对路边缓慢驶出车辆可以进行稳定检测,准确获取车辆速度、位置等信息,发送到车端进行融合感知定位,进而避免了车辆急刹或事故风险(如图6.25)。

图 6.25 路边低速车辆协同感知
(六)道路遗撒与低矮障碍物协同感知问题描述:
自动驾驶对低矮障碍物的感知能力要求是识别不小于5厘米的障碍物,场景的成功率不低于99%,而实测单车L4的成功率一般不能达到,车辆对车前低矮障碍物检测进行稳定检测有一定难度,存在感知漏检、误检的可能性,可能出现车辆急刹或事故风险。

图 6.26 仅依靠AD车端感知无法在远距离对遗撒交通场景精确识别
场景原理:
通过车路协同感知,实现对低矮障碍物进行持续稳定检测识别,由于路端感知设备固定安装,可以通过背景建模等手段,同时具有实时+历史的数据,对低矮障碍物做到更高的检出率和准确感知,并提前将感知到的障碍物信息发送给车辆,做出提前变道、缓行避让等更安全的驾驶决策(如图6.27)。
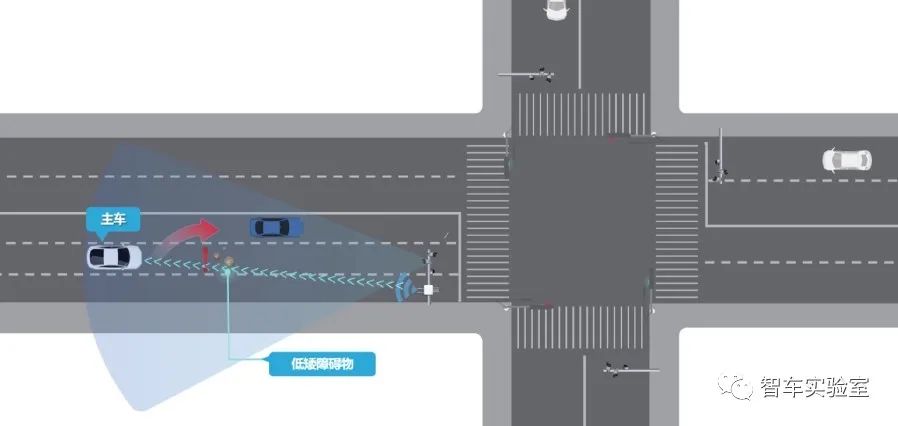
图 6.27 低矮障碍物协同感知
应用效果:
路端系统可对道路遗撒等低矮障碍物进行有效检测,并通过V2X远距离提前发送给车辆,提前进行判断和车辆决策控制,如变道绕行(如图6.28)。
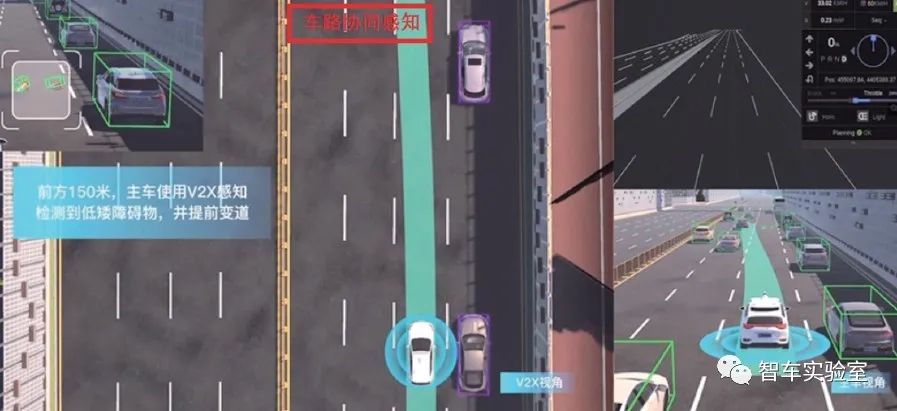
图 6.28 基于VICAD协同感知对道路遗撒识别
6.2.3车路协同决策规划实践
- 下一篇:标准 | SAE J3101车辆的硬件保护安全(1)
- 上一篇:地图参考位置协议



编辑推荐




最新资讯
-
imc/GRAS/AP首次联袂亮相ATE India 盛会
2025-04-11 13:49
-
GB/T 31486-2024 与 GB/T 31484-2015 修改
2025-04-11 13:48
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
